基于饱和函数的机械臂模糊滑模趋近律设计
2011-12-26席雷平
席雷平,郭 辉,何 东
(1.军械工程学院光学与电子工程系,河北石家庄 050003;2.河北科技大学外国语学院,河北石家庄 050018;3.河北电力研究院,河北石家庄 050021)
基于饱和函数的机械臂模糊滑模趋近律设计
席雷平1,郭 辉2,何 东3
(1.军械工程学院光学与电子工程系,河北石家庄 050003;2.河北科技大学外国语学院,河北石家庄 050018;3.河北电力研究院,河北石家庄 050021)
为了削弱机械臂滑模控制中的抖振现象,提出了模糊趋近律的控制方法。利用模糊控制器实时调整滑模控制的趋近律参数,并将饱和函数引入趋近律的设计中,设计了一种新型趋近律。该方法既保证了控制系统的快速性和鲁棒性,又能够有效地削弱抖振,另外,控制系统设计简单,便于工程应用。仿真结果表明,该控制策略不仅有效地抑制了系统的抖振,而且保证了机械臂系统对期望轨迹的快速跟踪性,进而提高了机械臂的工作性能。
机械臂;模糊滑模控制;抖振;饱和函数;趋近律
机械臂作为一类多输入、多输出非线性系统,具有强耦合、时变、模型不确定等特点,由于测量和建模的不精确性,实际上无法得出机械臂精确完整的动力学模型,因此,必须面对机械臂大量不确定性的存在。
滑模控制因其在滑动模态对系统干扰和摄动具有鲁棒性而得到控制界重视,近年来,滑模变结构控制越来越多应用到机械臂系统中[1-2]。但滑模控制的缺点是存在高频抖振,因此减弱抖振是机械臂滑模控制要解决的首要问题。
采用趋近律的方法能够有效地减弱滑模控制中的抖振问题[3]。笔者在对机械臂的动力学特性和常用趋近律进行深入分析的基础上,将饱和函数引入趋近律的设计中,并根据改进的趋近律设计了相应的机械臂滑模控制策略,最后以二关节机械臂为对象,对该滑模控制策略进行了设计与仿真。
1 机械臂动力学模型
基于拉格朗日运动学建立的n关节机械臂的动态方程为[4]

2 滑模面设计
将机械臂的系统误差e定义为

其中:qd为机械臂关节的期望位置矢量;q为实际输出位置矢量。取qd为指令,设计线性滑模面为[5]

当系统到达滑模面后,对给定的任意初始状态e(0),系统将稳定并在有限时间内到达平衡点。此外,通过设计常数矩阵C,可使控制系统具有好的动态品质。
3 趋近律设计
在对变结构控制原理的描述中到达条件没有反映运动如何趋近切换面,文献[6]提出并发展了趋近律的概念和公式,保证正常运动段的品质,即给出了按规定趋近律的趋近到达条件。指数趋近律是一种常用的趋近律,表示如下[7]:

式中,εsgn(s)为滑模控制项,当s→0时,ks→0,但εsgn(s)并不趋于0,故˙s也不趋于0,系统状态将会来回地穿越滑模面而造成抖振,并且抖振的强度由ε的大小来决定。
对于指数趋近律,为了有效地抑制高频抖振,必须减小ε,而小的ε又影响了系统的快速性;增大k可以加速趋近速度,但又要求系统有较大的控制强度。为了解决这个问题,采用模糊方法理论对于指数趋近律中的ε进行设计。
干扰的存在必然会引起机械臂位置误差e发生变化,由于滑模面s是关于e的函数,因此干扰的大小会影响到s的值,可以通过s的值来间接估计。基于这种思想,可以设计一维模糊控制器,它根据s的绝对值大小来实时地调整趋近律的参数ε,其原理如图1所示。
模糊控制器的输入变量为|s|,输出变量为ε。描述输入和输出变量的语言值的模糊子集均为
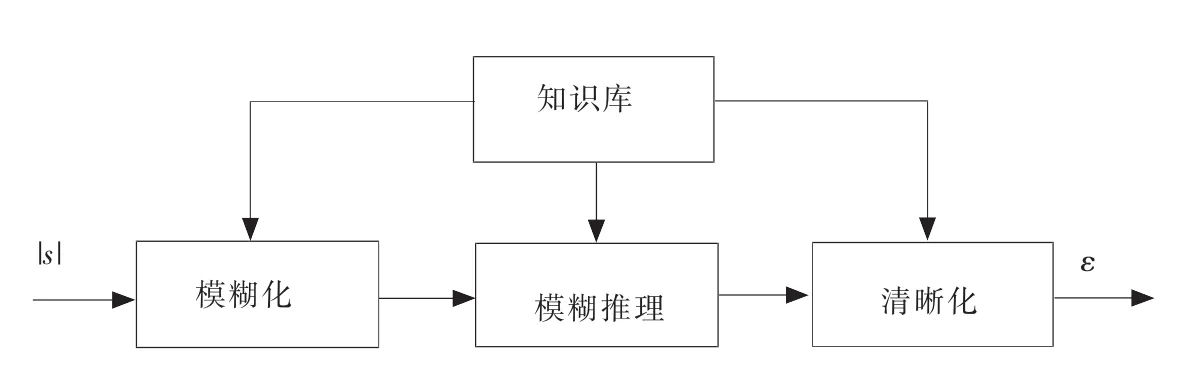
图1 模糊控制器原理图Fig.1 Schematic diagram of sliding-mode controller

设输入|s|的论域为U,并像U一样也把输出量ε的大小量化为6个等级,即

模糊控制规则如下:

根据控制经验,当|s|为PB时,表示系统状态远离滑模面,因此需要一个大的趋近律参数ε以加快趋近速度,即ε应为PB;当|s|为PS时,表示系统状态离滑模面较近,因此需要一个较小的ε使趋近速度变慢以减小抖振,即ε应为PS。基于上述经验,采用如表1所示的控制规则表[8]。
清晰化方法采用MIN-MAX-重心法,它是著名的Mamdani推理法。清晰化的控制量由式(5)计算,再经过尺度变换即可变为实际的控制量ε。

表1 控制规则表Tab.1 Chart of the control regularity

利用上述的模糊控制器实时地调整ε,从而构成了滑模控制的模糊趋近律。
采用模糊指数趋近律能够有效地削弱系统的抖振,但是只要控制器中含有符号函数sgn(s),控制输出就不可避免地会产生抖振现象。饱和函数可有效抑制抖振,使输出平滑有界。因此考虑采用饱和函数中的双曲正切函数来代替符号函数进行趋近律的设计,双曲正切函数具体表达式如下:

饱和函数法实质上是用饱和特性取代原有继电特性[7],目的是缓解切换的不连续性。图2是符号函数和双曲正切函数的比较曲线,从图2中可以看出,双曲正切函数使得切换过程变得连续而又平滑,这对于抑制趋近运动过程的抖振具有重要作用。
在趋近律的设计中引入双曲正切函数,具体表示为
˙s=-εtanh(s)-ks,ε>0,k>0。 (7)
该趋近律既克服了指数趋近律方法中滑模运动切换带为带状的缺点,又保证了趋近过程的快速性,并且当接近滑模面时,该趋近律速度接近为0,有效地减小了进入滑模面的初始系统抖振。
4 控制律设计
[9]的系统设计思想,机械臂模糊滑模变结构控制系统的结构设计如图3所示。根据图3并结合式(2)可知:

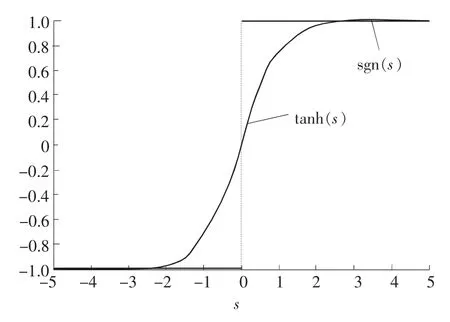
图2 双曲正切函数与符号函数比较图Fig.2 Curves of hyperbolic tangent function and sign function
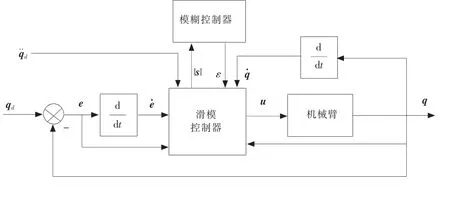
图3 机械臂控制系统结构图Fig.3 Schematic diagram of robotic manipulator control system
5 系统仿真
选取二关节机械臂为控制对象,利用Matlab软件对其进行仿真研究。在不考虑摩擦力的情况下,其动力学方程为


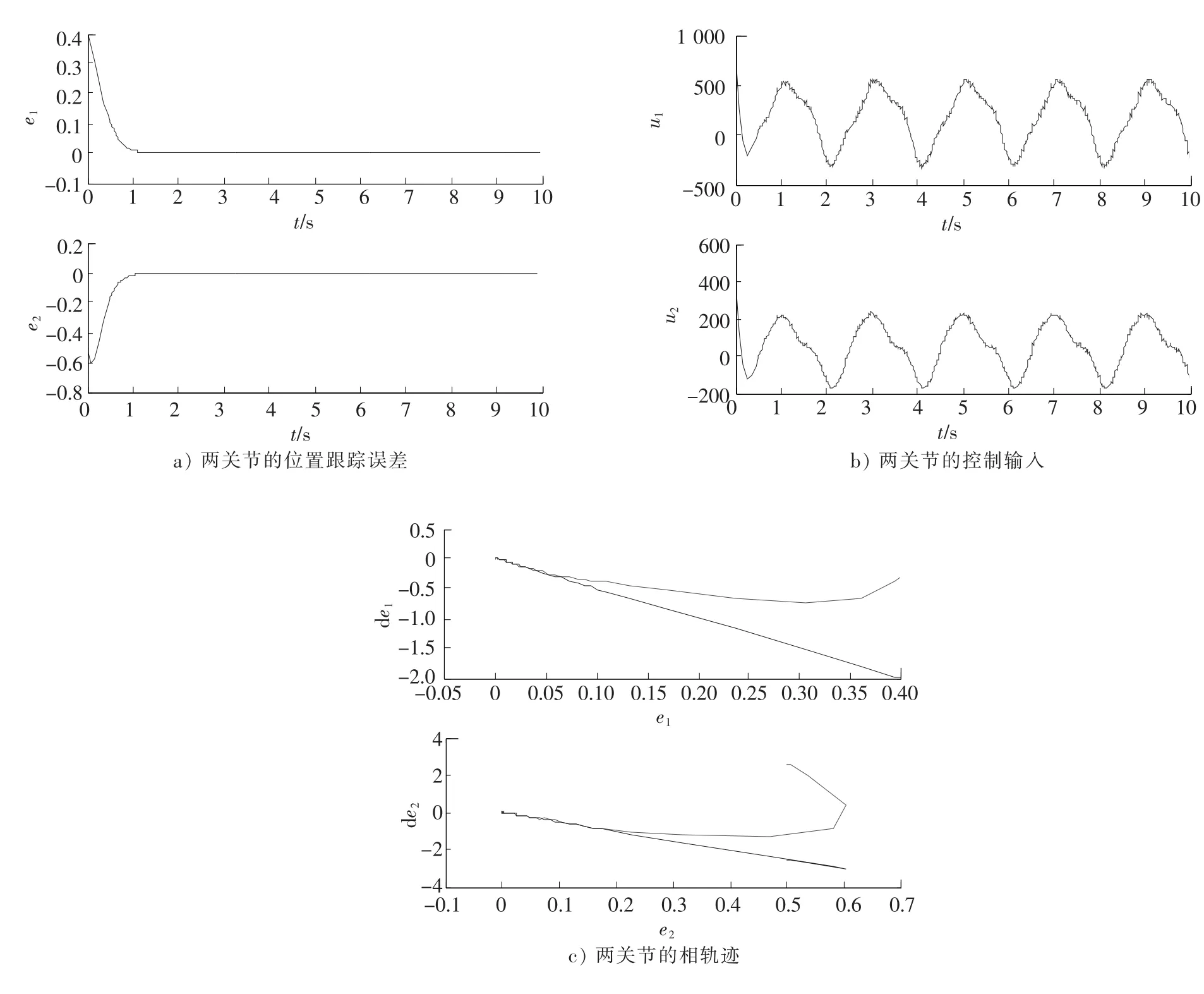
图4 基于指数趋近律的机械臂滑模控制仿真曲线Fig.4 Sliding-mode control simulation curves of robotic manipulator based on exponential trenind law
由仿真结果可知,基于饱和函数设计的机械臂模糊滑模趋近控制策略不仅能够有效地抑制系统的抖振,使得实际的控制输入比较平滑,而且保证了机械臂系统对期望轨迹的快速跟踪性,更重要的是缩短了趋近阶段的时间,使得系统由初始状态进入滑模状态的速度大大提高,从而提高了系统的鲁棒性。
6 结 语
图5 基于改进趋近律的机械臂模糊滑模控制仿真曲线Fig.5 Sliding-mode control simulation curves of robotic manipulator based on improved trenind law
在对机械臂滑模控制中存在的抖振问题进行深入分析的基础上,采用模糊趋近律的方法来抑制抖振,并将饱和函数引入到模糊趋近律的设计中来,设计了相应的机械臂模糊滑模控制策略,与常规的指数趋近律滑模控制策略相比,该控制策略具有更好的鲁棒性,不仅能够有效地抑制滑模控制中的抖振,而且保证了机械臂关节的快速跟踪性。最后,借助Matlab工具箱对该控制策略进行了仿真实验,验证了其可行性和有效性,说明了该控制策略具有较好的控制性能。
参考文献:
[1] KOSTARIQKA A K,ROVITHAKIS G A.Adaptive neural network tracking control with disturbance attenuation for multiple-input nonlinear systems[J].IEEE Transactions on Neural Networks,2009,20(2):314-319.
[2] 刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
[3] 刘金锟,孙富春.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用(Control Theory & Applications),2007,24(3):407-416.
[4] 蔡自兴.机器人学[M].北京:清华大学出版社,2009.
[5] 穆效江,陈阳舟.滑模变结构控制理论研究综述[J].控制工程(Control Engineering of China),2007,14(S1):1-5.
[6] 高为炳.变结构控制理论及设计方法[M].北京:科学技术出版社,1996.
[7] 林 雷,王洪瑞,任华彬.基于模糊变结构的机械臂控制[J].控制理论与应用(Control Theory & Applications),2007,24(4):643-645.
[8] 刘启明.模糊滑模变结构控制设计[J].复旦学报(自然科学版)(Journal of Fudan University(Natural Science)),2004,43(5):952-954.
[9] 刘朝英,王惠芳,宋雪玲,等.一种改进的模糊调节神经网络及其应用[J].河北科技大学学报(Journal of Hebei University of Science and Technology),2008,29(4):295-298.
[10] 刘金锟.机器人控制系统的设计与MATLAB仿真[M].北京:清华大学出版社,2008.
Design of fuzzy trending law based on saturation function in sliding mode control for robotic manipulators
XI Lei-ping1,GUO Hui2,HE Dong3
(1.Department of Optics and Electrics Engineering,Ordnance Engineering College,Shijiazhuang Hebei 050003,China;2.College of Foreign Languages,Hebei University of Science and Technology,Shijiazhuang Hebei 050018,China;3.Hebei Electric Power Research Institute,Shijiazhuang Hebei 050021,China)
In order to weaken chattering phenomenon of robotic manipulators,a method of fuzzy trending law is presented.It applies fuzzy controller to adjust the parameters of trending law of sliding mode control timely,while saturation function is introduced into trending law design,and then a new trending law is proposed.This method can not only ensure the speediness and robustness of the control system,but also weaken chattering effectively.In addition,the design of the control system is simple,so it can be easily applied to engineering.The simulation results show that the scheme can not only control the chattering effectively but also achieve a fast and accurate tracking,thus enhancing the operational performance of robot manipulators.
robotic manipulator;fuzzy sliding mode control;chattering;saturation function;trending law
TP391.8
A
1008-1542(2011)05-0482-06
2011-06-17;
2011-09-09;责任编辑:李 穆
军队2110实验室重点资助项目;军械工程学院基金项目(JX2011026)
席雷平(1979-),男,河北邯郸人,讲师,博士研究生,主要从事导航、制导与控制方面的研究。
