基于MATLAB的双足仿生电动移动平台设计
2011-12-26刘东辉杨丽丽赵新伟孙晓云
刘东辉,杨丽丽,赵新伟,孙晓云
(1.河北科技大学电气信息学院,河北石家庄 050018;2.石家庄铁道大学电气与电子工程学院,河北石家庄 050043)
基于MATLAB的双足仿生电动移动平台设计
刘东辉1,杨丽丽1,赵新伟1,孙晓云2
(1.河北科技大学电气信息学院,河北石家庄 050018;2.石家庄铁道大学电气与电子工程学院,河北石家庄 050043)
通过MATLAB设计了一种新型代步工具平台——双足仿生电动移动平台。利用MATLAB平台下的虚拟现实工具箱,视频采集工具箱以及GUI,Simulink仿真等软件,建立并驱动人体下肢三维模型,完成人体下肢运动控制仿真;在GUI人机交互界面,通过摄像头对人体下肢运动情况进行运动捕捉,提取髋骨关节、膝关节及踝关节在运动过程中角度的变化值,完成人体下肢运动数据的存储。
视频采集;仿真模型;虚拟现实;数据存储
普通的代步轮椅在一定的程度上给老年人和残疾人的生活带来了方便,但它的局限性也是显而易见的。例如当遇到障碍(如沟、坎等)或者上下楼梯、台阶时,就会有很大的困难,没有旁人协助根本无法完成。笔者针对以上问题提出了一种新式的可跨步行走的足式椅的设想,并对其进行基于MATLAB的运动仿真。足式椅改变原来轮椅的四轮定向结构,利用仿生学原理,模拟人体双足交替运动,在使用者的控制下使胯关节、膝关节等多关节协同,完成完整的行走动作。
在GUI界面采集按钮的回调函数中利用MATLAB的视频采集工具箱将人体下肢行走动作进行捕捉,通过编写程序函数实现各控件的函数功能,然后利用算法将得到的图像中各关节的数据进行存储。将得到的数据放到Simulink仿真模块中,将关节的数据和虚拟世界的三维模型进行连接,使模型按数据进行运动。
1 构建GUI图形用户界面,并利用回调功能进行视频采集
编辑图形用户界面,并设置不同功能的回调函数[1]。为了得到人体下肢运动参数,通过MATLAB对人体下肢运动进行图像采集,将采集数据保存备用。
1.1 GUI图形用户界面
整体仿真界面上需要包含以下信息:实验者的个人基本信息(包括姓名、年龄、性别、步速),以便之后存储;实验中实验者的运动状态选择,以及采集视频用的摄像头选择;采集开始、采集信息处理、关闭采集按钮;与Simulink连接的调用按钮以及关闭界面按钮。整体效果如图1所示。
1.2 视频采集
Image Acquisition Toolbox(图像采集工具箱),是MATLAB工具箱中重要的软件包之一。它为用户提供了一种面向对象的图像采集方法[2]。将图像采集设备连接到MATLAB,并通过工具箱提供的函数,对图像进行采集,如果对控制对象的属性进行修改控制,就可以按照需要决定何时开始采集,采集多少数据等。
在MATLAB中,要确定选用什么样的适配器,则在MATLAB与外部视频设备连接好后,在MATLAB命令窗口中调用imaqhwinfo函数。函数的返回值中包括了在Installed Adaptors领域可选用的适配器等相关信息。例如在MATLAB命令窗口输入imaqhwinfo,则可知系统可选用适配器名称为winvideo,此时就可以建立一个视频输入对象myvid=videoinput(‘winvideo’)。想要预览视频采集窗口,则需在MATLAB命令窗口键入:preview(myvid),即可打开一个视频预览窗口如图2所示。查看视频设备所支持的格式,可调用函数imaqhwinfo返回值Deviceinfo中的Supported Formats。例如建立的视频输入对象my_vid=imaqhwinfo(‘winvideo’,1),查看其支持的视频格式可用my_vid.Supported Formats即可。
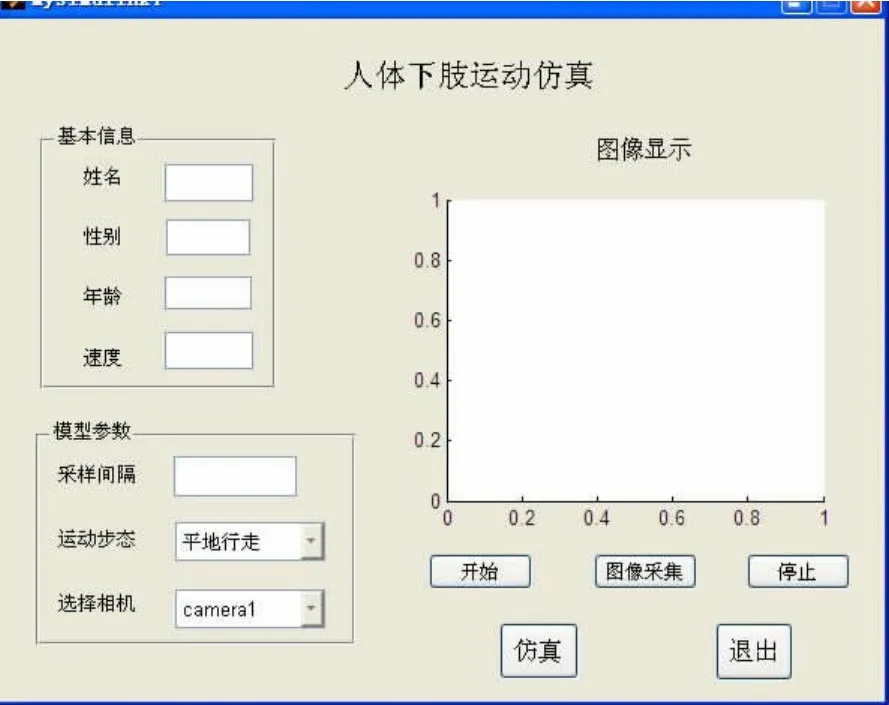
图1 整体效果图Fig.1 Overall effect diagram
关闭预览窗口则可用closepreview(myvid)命令。除了winvideo,设备适配器种类一般还有coreco(主要适用于Coreco图像处理生产的视频设备)、dcam(适用于IEEE 1394(FireWire)图像采集设备)、dt(应用于数据转换的视频设备)、matrox(应用于Matrox电子系统的视频设备)[3]。
视频采集工具箱提供了相当丰富的函数来设置相关参数。通过设置,可以控制视频采集数据量、采集图像的亮度、色调和饱和度。采集到的图像数据可以存储到AVI文件以备用。图像采集工具提供了相应函数,首先创建一个AVI文件,执行下面程序代码即可实现,aviobj= avifile(‘my_datalog.avi’),对于创建的 AVI文件对象返回值,通过修改其属性值,可以设定存储数据质量、数据压缩等。例如aviobj.Quality=50即为修改图像质量,数值越小,文件就越小。
1.3 关节数据采集算法
在视频采集模块中,通过人体下肢运动进行动作捕捉,提取相应的髋骨关节、膝关节及踝关节在运动过程中运动角度一系列的变化值,并保存到相应的.mat文件中。
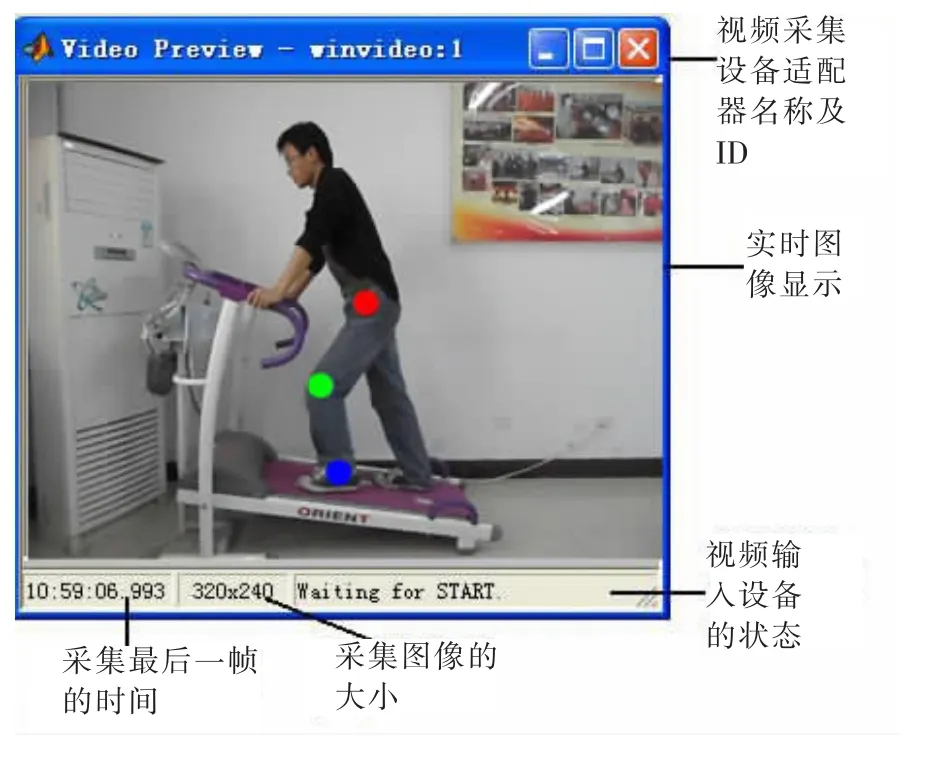
图2 视频预览窗口Fig.2 Video preview window
实验中分别用红色、蓝色、绿色3种圆形标签作为髋关节、膝关节、踝关节的运动标记。因此只需在采集到的视频图像中,提取3个颜色图像,并把无用的背景赋值白色即可。另外,建立好视频输入对象,开始采集记录数据。可发现采集到的数据为4维矩阵,其中多出一个时间向量,该向量记录的是采集到图像的时间顺序。如vid(:,:,:,1)表示采集到的第1幅图像,vid(:,:,:,n)为采集到的第n幅图像,分清这些就可以对想要处理的图像进行处理了。按正确方法读取其中的一幅图像,即可对其进行颜色提取。图像提取流程图如图3所示。
完成了背景去除工作,接下来需要找到红、绿、蓝3个圆形标签的中心点。背景去除后的图像,只有红、绿、蓝3个标签且背景是白色。由于上步处理过程中把图像像素理想化,即图像中背景颜色白色的R,G,B分量为(255,255,255),红色的R,G,B 分量为(255,0,0),绿色的R,G,B 分量为(0,255,0),蓝色的R,G,B分量为(0,0,255),没有其他杂色。找3种颜色的中心点坐标值实质是找其中心点的行列值。
为了更好地控制三维模型,必须对所得到的坐标值做进一步处理,将平面坐标值转换为各关节旋转的角度值。这样通过控制角度旋转模拟人体下肢的运动过程。
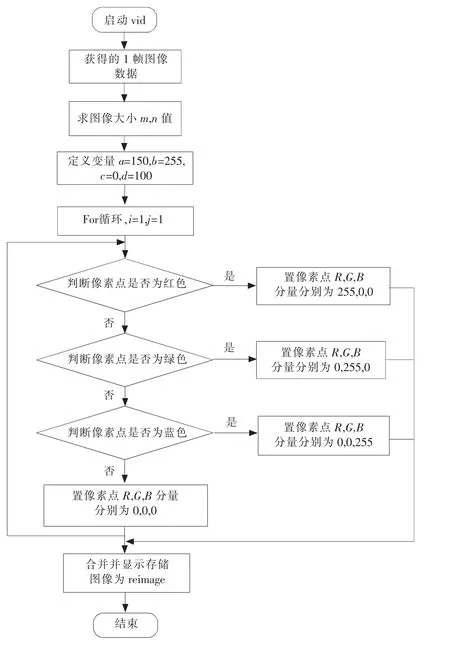
图3 图像提取流程图Fig.3 Flow chart of image extraction
2 双足仿生电动移动平台仿真
依照双足仿生电动移动平台仿真的设计要求,分析人体下肢骨架的组成结构,然后根据人体下肢骨骼的运动连带关系,建立起人体骨架的球棍模型。最后利用MATLAB中V-Realm Builder软件构建、完成下肢三维模型的建立。
模型中人体下肢骨骼的连带关系[4]如图4所示,完整模型见图5。
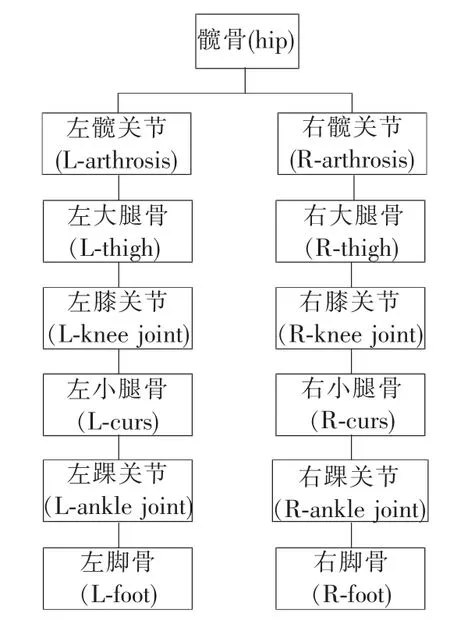
图4 人体下肢骨骼连带关系Fig.4 Relationship between lower limb joint bones
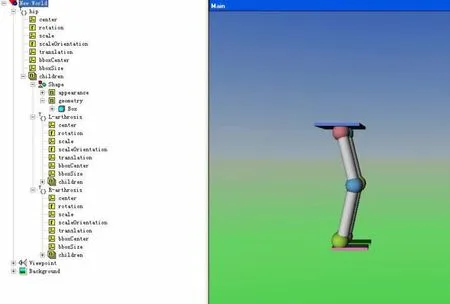
图5 双足仿生运动平台三维模型Fig.5 Three-dimensional model of bionic bipedal motion platform
2.1 Simulink进行仿真
采用Simulink中适当的仿真模块(如图6所示),对采集到的数据进行读取[5],并做相应运算,最后通过虚拟现实工具箱连接下肢三维仿真模型,对其进行驱动,仿真人体下肢的运动。
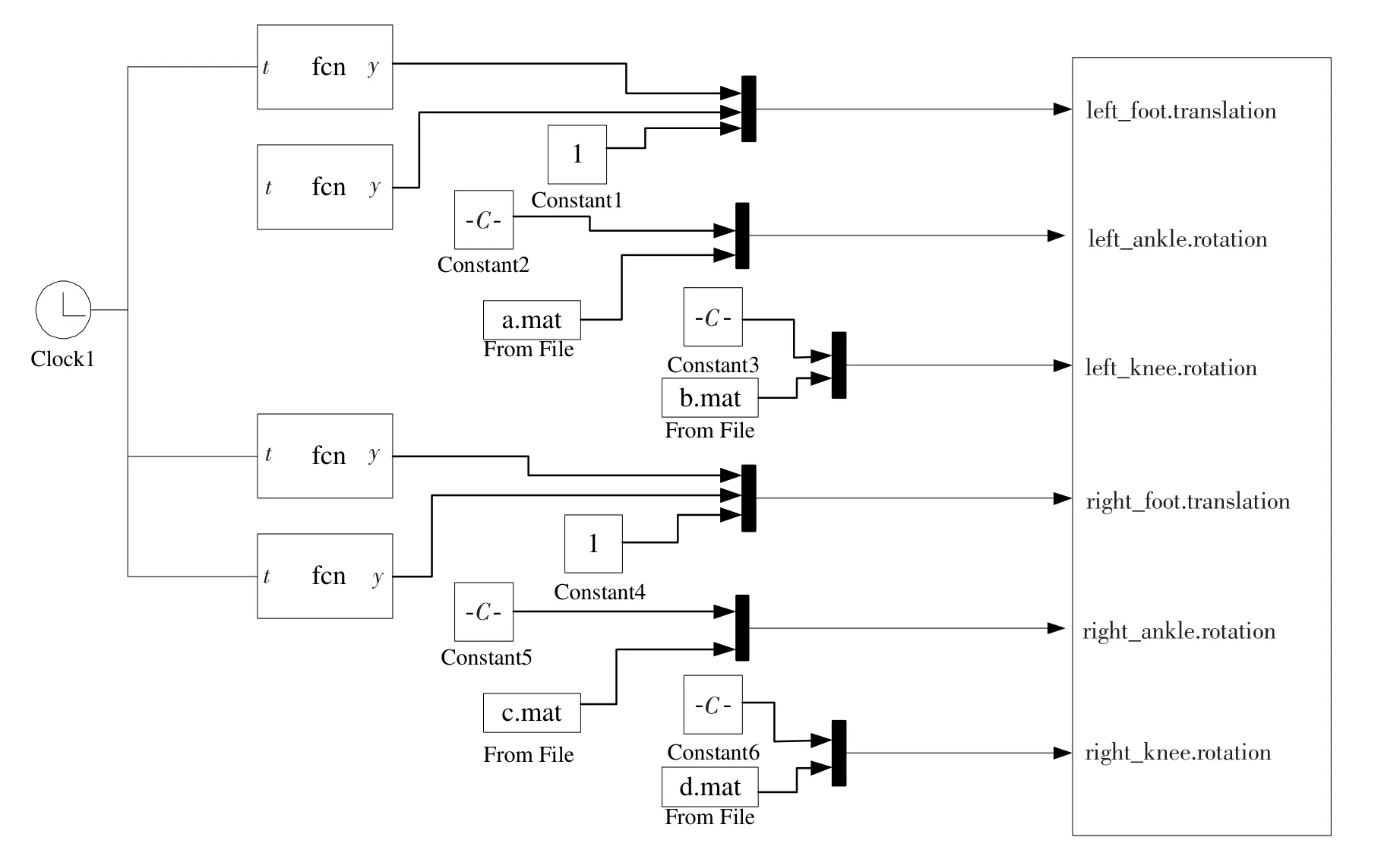
图6 仿真模块框图Fig.6 Block diagram of simulation
2.2 仿真结果
利用MATLAB自带的VRML浏览器查看三维仿真结果(见图7)。从仿真结果可知,可以应用上述方法进行相应的实验研究、验证模型的准确性以及控制算法的有效性。同时在此基础上,还能建造可载人的实物平台,进行工程研究。
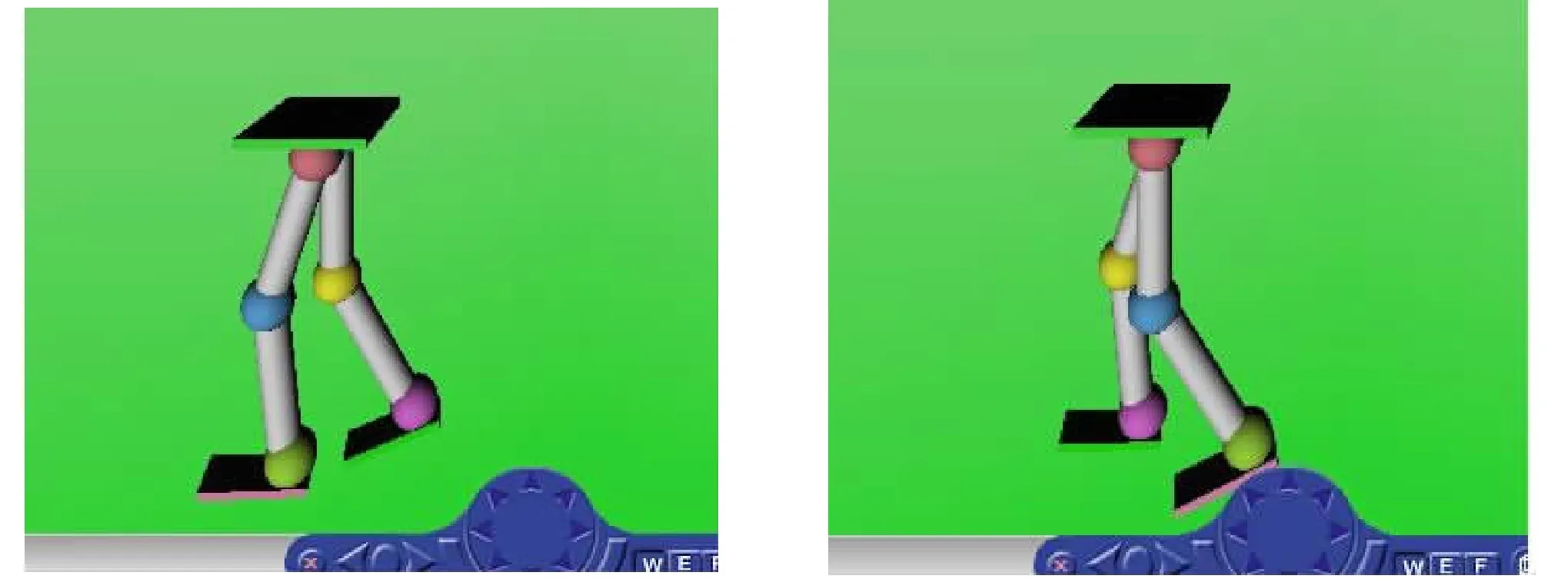
图7 运动仿真结果Fig.7 Results of motion simulation
3 结 语
利用MATLAB平台下的虚拟现实工具箱、视频采集工具箱以及GUI,Simulink仿真等软件包互相结合,共同完成了人体下肢运动控制仿真。建立GUI人机交互界面,通过摄像头对人体下肢运动情况进行运动捕捉,将人体下肢运动数据通过Simulink及VR工具箱,驱动下肢三维仿真模型运动,实现了双足仿生电动移动平台前期研究工作的运动仿真。
[1] 邱金蕙,王矞辉,李振全.基于 Matlab/GUI的新型界面开发方式[J].河北工业科技(Hebei Journal of Industrial Science and Technology),2008,25(4):233-235.
[2] 周广芬,李 鹏,杨久义.利用MATLAB图像处理工具箱进行图形数字化的研究[J].河北科技大学学报(Journal of Hebei University of Science and Technology),2005,26(4):309-311.
[3] 王正林,刘 明.精通 MATLAB[M].北京:电子工业出版社,2006.
[4] SIMS M E.Reusable,lifelike virtual humans for mentoring and roleplaying[J].Computers and Education,2007,49(1):75-92.
[5] 佟 杰,王 岚,吴 洋.基于MATLAB虚拟现实工具箱的手臂康复机器人仿真[J].应用科技(Applied Science and Technology),2006,33(10):63-65.
Design of bipedal bionic electric mobile platform based on MATLAB
LIU Dong-hui1,YANG Li-li1,ZHAO Xin-wei1,SUN Xiao-yun2
(1.College of Electrical and Information Engineering,Hebei University of Science and Technology,Shijiazhuang Hebei 050018,China;2.College of Electrical and Electronics Engineering,Hebei Tiedao University,Shijiazhuang Hebei 050043,China)
A new kind of double foot bionic electric mobile platform based on MATLAB is proposed.Virtual reality toolbox,video acquisition Toolbox,GUI and Simulink are used to complete the whole simulation,in which a 3D lower limb model is built and drived.In GUI,the movement of lower limbs is got by a camera,then the changed angle data of hip joints,knee joints and ankle joints in movement are extracted,and the data of the lower limbsmorement are stored.
video acquisition;simulation model;virtual reality;data storage
TP391
A
1008-1542(2011)05-0477-05
2011-04-03;
2011-09-08;责任编辑:李 穆
国家自然科学基金资助项目(50874035);河北省自然科学基金资助项目(F2009000732)
刘东辉(1971-),男,山西晋城人,教授,博士,主要从事生物医学工程及图像处理方面的研究。
