ATV交会飞行控制策略研究
2011-12-26朱仁璋王鸿芳徐宇杰泉浩芳
朱仁璋 王鸿芳 徐宇杰 泉浩芳
(1 南京大学,南京 210093)
(2 中国空间技术研究院,北京 100094)
(3 北京航空航天大学,北京 100191)
1 引言
早在20 世纪80年代,欧洲航天局(ESA)就为赫尔墨斯-哥伦布舱(Hermes-Columbus)规划研发交会对接技术。Columbus是“有人照料的自由飞行体”(M an-Tended Free-Flyer,MTFF),计划与美国“自由”(Freedom)空间站对接;而Hermes是欧洲空间飞机(Spaceplane),计划访问MTFF。Hermes-Columbus是一个庞大而复杂的空间规划,它激发了欧洲人对载人航天的热情与活力。然而,进入20 世纪90年代后,受欧洲政治变化的影响,MTFF 与Hermes 项目被中止,东西方空间站规划合并为“国际空间站”(ISS)。于是,欧洲航天局(ESA)开始研发“自动转移飞行器”(ATV),计划与“国际空间站”(ISS)交会对接,提供货运服务。[1]现在,ATV 第1次飞行已取得圆满成功,欧洲人朝向载人飞行使命迈出了第一步。
ATV 规划共有7次飞行,第1次飞行已于2008年3月至9月成功完成,第2个飞行器将于2011年2月发射。由于ATV是与ISS 交会对接,且ATV 本身也将朝向载人航天器方向发展,为欧洲未来的载人飞行进行技术准备,因此,ATV 需具有高品质性能,并满足严格的安全性要求。飞行控制的全自动操作,高度自主性,以及严格的飞行安全性是ATV 使命的主要特点。
高度自主性主要体现在交会飞行阶段。在这一阶段的远距离交会期间,ATV 应用“相对GPS”(RGPS)导航;而在最终逼近期间,应用“视频仪”(VDM)相对导航系统。ATV交会飞行自主导航系统可使飞行器在脱离地面控制情况下,实现自主交会对接与解除对接后的分离。为增强交会对接运作的坚固性与灵活性,地面与ISS 乘员可在必要时介入飞行控制。
关于飞行安全性保障,除软件单元“使命与飞行器管理”(MVM)中的“故障探测、隔离与修复”(FDIR)及“逃离”(Escape)机动功能外,ATV 还附加主系统功能“交会监测与避撞”(RM CA)。RMCA分解为2个子功能:1)软件单元“飞行控制监测”(FCM);2)功能单元“邻近飞行安全性”(PFS)。FCM 也在用于标称“制导、导航与控制”(GNC)的“故障容限计算机”(FTC)上运行,但应用不同于标称GNC系统的敏感器与运作方式;而PFS 具有专用计算机(数据管理系统),即“监测与安全保障单元”(MSU),MSU可在FTC 失效情况下执行“避撞机动”(CAM),安全撤退。CAM 不仅可自主触发(Auto-CAM),在必要时还可由地面“ATV 控制中心”(ATV-CC)或ISS 乘员触发(红按钮CAM)。因此,ATV 具有3层安全屏障,即MVM FDIR,FCM,PFS。逃离可从S0(RGPS 确定并投入使用的航向点)直至对接前几米的交会轨迹上的任一点开始,而CAM可在更大范围内触发。在任何情况下,安全性要求须在任意2次故障后得到满足,在ATV施加CAM 后的自由漂移24h卷间内,ISS“警戒球”(KOS)应保持不被侵入。
本文着重从交会飞行的自主性与安全性两方面阐述ATV 飞行控制策略。关于ATV 顶层设计理念以及标称轨迹与制导、控制等基本设计方法,请参阅参考文献[1]与[2]。
2 AT V 使命概述
2.1 结构体系与通信链路[3-5]
2.1.1 结构体系
ATV 使命结构体系由“ATV系统”(内部实体)及“外部实体”两大部分组成。其中,“ATV系统”包括“ATV 飞行部分”与“ATV 地面部分”;“外部实体”涉及发射系统,ISS,全球定位系统(GPS),中继卫星网(TDRSS 与Artemis),以及ATV 货运器用户(参见图1)。
2.1.2 通信链路
在整个使命期间,ATV 经由“跟踪与数据中继卫星系统”(TDRSS)与“阿特米斯”(Artemis)激光通信卫星链路与ATV-CC 进行通信联络;在ISS 邻近运作(即调相后的交会及解除对接后的分离)期间,“邻近链路”(Proximity Link)天线支持ISS 与ATV 之间直接的数据传送。
尽管ATV 的许多分系统是自主的,但对所有阶段(联接阶段除外),仍有许多飞行动力学方面的任务在地面执行。ATV-CC 负责ATV 轨道确定,轨道制导策略,以及ATV 地面监测。另一方面,ISS 绝对轨道由“莫斯科使命控制中心”(M CC-M)与“休斯顿使命控制中心”(MCC-H)提供。当需要时,精确的碎片碰撞概率也由MCC-M 提供,这是基于ATV-CC 提供的ATV 轨道作出的。
欧洲航天局(ESA)的Artemis 承担ATV 与ATV-CC 之间的通信任务。Artemis是数据中继技术试验平台,且作为未来“欧洲数据中继卫星”(EDRS)系统的先导星。Artemis 预期工作至2013年,那时第一个EDRS 将被发射。在ATV 使命运作中,TDRSS 不仅为ISS 与M CC-H 之间进行数据传送,而且也为ATV 与ATV-CC 之间的数据传输服务。此外,ISS的俄罗斯舱段与MCC-M 之间有直接的通信联络(ATV 控制中心与通道链路参见图2)。

图1 ATV 使命结构体系Fig.1 ATV mission architecture

图2 ATV 控制中心与通信链路[4]Fig.2 ATV Control Centre and communications link in operation
2.2 飞行器功能体系[3]
ATV 功能可划分为两级。第1级为“主系统功能”(M ain System Functions),定义为保证整个ATV 使命成功运作的总体服务功能。第2级功能是实现第1级“主系统功能”的硬件系统与软件集成单元,由“功能单元”(FU)与“软件单元”(S U)组成。“功能单元”包含硬件装置及相应软件;“软件单元”仅含软件,不含硬件。
第1级“主系统功能”共10 项:1)飞行控制(FLC);2)对接与解除对接(DOC);3)对ISS的推进支持;4)加注(REF);5)交会监测与避撞(RM CA);6)安全模式(SUR);7)电能供应(PSUP);8)热管理(THM);9)货运设备与乘员接口(CACI);10)飞行器指令与控制(VCC)。
第2级“软件单元”包括:1)制导、导航与控制(GNC);2)遥测遥控(TM TC);3)使命与飞行器管理(MVM);4)飞行控制监测(FCM);5)参照系服务(FRM S)共5 项。
第2级“功能单元” 共14 项:1)通信系统(COM);2)指令与监测系统(CMS);3)电源系统(PWS);4)GNC 测量系统(GMS);5)推进系统(PRO);6)对接与加注系统(DRS);7)太阳发电系统(SGS,包括太阳电池翼驱动系统及太阳电池翼压紧与释放系统等);8)ATV/A5分离与接口系统(A5I);9)热控制链(TCC);10)水与气输送系统(WGD);11)环境控制与生命保障(ECLS);12)外部监测器件(EM A);13)数据处理系统(DPS);14)邻近飞行安全性(PFS)。其中,“数据处理系统”(DPS)包含1台“故障容限计算机”(F TC,含3台DPU 数据处理单元),“邻近飞行安全性”(PFS)包含2个“监测与安全保障单元”(MSU)。
在“主系统功能”中,与飞行器自主控制及安全性关系最为密切的是“飞行控制”(FLC)及“交会监测与避撞”(RM CA)。“飞行控制”(FLC)包括软件单元“制导、导航与控制”(GNC)与“参照系服务”(FRMS),以及功能单元“GNC 测量系统”(GMS)与“推进系统”(PRO)。“交会监测与避撞”(RMCA)包括软件单元“飞行控制监测”(FCM)与功能单元“邻近飞行安全性”(PFS)。
2.3 ATV 飞行器构型[3,6-10]
2.3.1 本体结构
ATV 由“货运器”(Cargo Carrier)与“航天器功能舱”(Spacecraft Function M odule;即服务舱,Service M odule)组成(图3)。货运器包括对接系统,加压舱(48m3)与不加压舱(外部舱);航天器功能舱由电子设备舱与推进舱组成,推进舱外壳上装有太阳电池翼。ATV 发射质量约20 000kg(受限于火箭运载能力),其中干质量(dry mass)约占一半,货品与飞行器载推进剂占另一半[6];全长约10.3m(对应对接杆伸出的全长;对接杆伸出时对接系统长 991mm ,对接杆收回时对接系统长516mm),飞行器最大直径为4.5m,太阳电池翼跨距22m ;太阳阵提供功率4.8kW。

图3 AT V 主要部件图[3,10]Fig.3 ATV main components description
2.3.2 GNC 测量系统
“GNC 测量系统”(GM S)包含下列设备:1)4台2-轴“陀螺仪组件”(GYRA);2)2台“恒星跟踪器”(S TR);3)3台2-轴“加速度计”(ACCA);4)2台“全球定位系统”(GPS)接收机(ISS 上还有2台GPS 接收机);5)2台“视频仪”(VDM);6)2台“远距测向仪”(TGM)。此外,还有专用于施加“避撞机动”(CAM)后(Post-CAM)的2台“太阳敏感器单元”(SSU)。
1)“陀螺仪组件”(GYRA)由4个双轴“干式调谐陀螺仪”(DTG)组成,呈棱锥几何构形。G YRA提供ATV 惯性姿态速率测量信息。GYRA可容许2台DTG 失效。DTG 漂移在ATV 上进行估计与补偿,这是基于估测精密的“恒星跟踪器”(S TR)姿态测量数据。
2)“恒星跟踪器”(ST R)是光学敏感器,由带有遮光板的冷CCD 阵列组成,通过对照星上恒星表的星空目标图形识别,提供ATV 惯性姿态。在交会阶段,2个“恒星跟踪器”(S TR)处于热备份的工作状态;除了这种情况,2个ST R 一起处于冷备份,用于自由飞行。
3)“加速度计组件”(ACCA)提供ATV 非引力加速度测量信息。ACCA容许一台失效,且可探测第2 故障。加速度计在平稳飞行期间进行校准。
4)GPS 接收机由天线与电子盒组成。GPS 测量信息在整个使命期间用于地面轨道测定,提供空间绝对位置与时间;在远距交会阶段,也用于ATV上相对位置测量。(ISS 上的GPS 接收机提供相对GPS导航与PVt 信息。)
5)“视频仪”(VDM)由激光二极管与带有电子盒的CCD 阵列组成,在最后300m 内提供测距与视线测量信息,且在最后30m 内提供相对ISS的姿态测量信息。
6)“远距测向仪”(TGM)由激光二极管与带有电子盒的旋转镜组成,在最后300m 内提供测距、测距率及视线的测量信息。TGM 测量信息仅被RMCA功能应用。
2.3.3 推进系统
ATV“推进系统”(PRO)包含两类推力器。一类由4台“轨道控制系统”(OCS)主推力器(每台推力490N)组成,用于大推力轨道转移(机动速度超过5m/s),安装在飞行器尾部(见图4与图5)。另一类共28台姿控推力器(每台推力220N)用于姿态控制和小推力轨道机动与交会(机动速度低于5m/s),其中8台安装在飞行器前缘(4 组,每组2台,图4中推力器21 至28),另20台推力器安装在飞行器后缘(4 簇,每簇5台,见图4[9]与图5)。在ISS 与ATV 联接期间,这两类推力器均可为ISS 提供推进支持,提升轨道高度。
2.4 标称飞行程序[2,7-8,11]
这里“标称飞行程序”是指通常情况下ATV 预定的飞行程序,不包含像ATV-JV所增加的飞行演示程序,也不包括应对故障的应急机动飞行程序。按ATV 与ISS的相对距离以及相应的导航手段,机动方式与轨迹形态,ATV 标称使命可分为下列6个阶段,这些子阶段以接口点(航向点或保持点)作为起点与终点的标识(见表1)。
1)发射与初轨阶段(LEOP)。在这个阶段,ATV 由阿里安-5(Ariane 5,简称A5)火箭射进初始轨道(见图6),太阳翼展开,推进系统准备就绪,且所需的GM S 启动。在该阶段结束时,ATV 处于安全的稳定状态,准备执行调相机动。
2)调相阶段(Phasing)。在这一阶段,ATV 进行几次大的助推机动,逐步提升到交会轨道高度,与此同时,ATV 步步接近ISS,缩小相位角之差。调相阶段终结在最后一次调相机动点S-1/2,这一点位于ISS 之后39km,之下5km。最后一次调相机动是轨道圆化机动,使ATV 相对ISS 作直线形漂移。在S-1/2 点,ATV 与ISS 之间的“邻近链路”(Proximity Link)开始接通(参见图7)。
3)交会阶段(Rendezvous Phase)。这一段从直线形漂移轨道起点S-1/2开始,直至ATV 与ISS的第1次接触。沿交会轨道有航向点S-1/2,S0,S1,以及V-bar 上的位置保持点S2,S3,S4,S41。在交会阶段,主系统功能RMCA处于激活状态。
S-1/2至S0 的漂移飞行期为绝对GPS(AGPS)向相对GPS(RGPS)转换的过渡阶段。在S0,RGPS已建立,达到预期精度,可投入使用。交会阶段可划分为远距交会(Far Rendezvous)与近距交会(Close Rendezvous)两部分。远距交会应用相对GPS,近距交会应用光学敏感器“视频仪”(VDM)。远距交会包括预寻的(Pre-Homing)(S-1/2至S1),寻的(Homing)(S1至S2),以及接近(Closing)(S2至S3)三小段(图8)。近距交会即最终逼近(Final Approach,S3至ATV 与ISS 首次接触,见图9与图10)。“保持”(Hold)与受控后撤(Retreat)机动,可在这一阶段的任何时刻被命令执行。最终逼近包含最终逼近1(Final Approach 1)(S3至S4,见图9)与最终逼近2(Final Approach 2)(S4至ATV 与ISS首次接触,见图9与图10);而最终逼近2 又可分为两部分,即最终逼近21(部分1)(S4至S41)与最终逼近22(部分2)(S41至首次接触)。
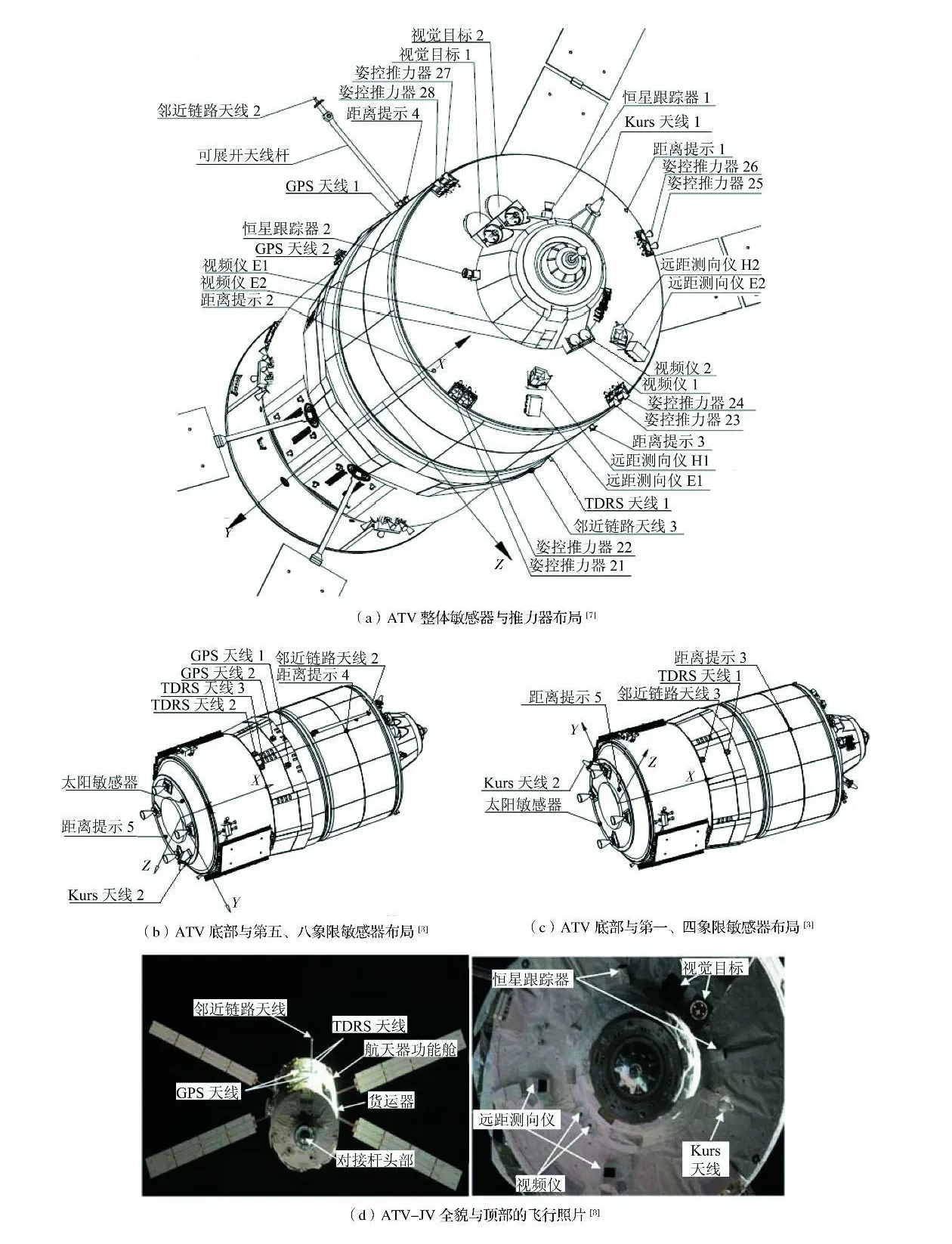
图4 ATV 外部敏感器与推力器Fig.4 External sensors and thrusters of ATV

图5 ATV 主推力器与后缘的姿控推力器Fig.5 ATV main thrusters and attitude control thrusters in the rear-edge

表1 ATV交会航向点与保持点定义[8]Table1 ATV rendezvous way and hold points definitions
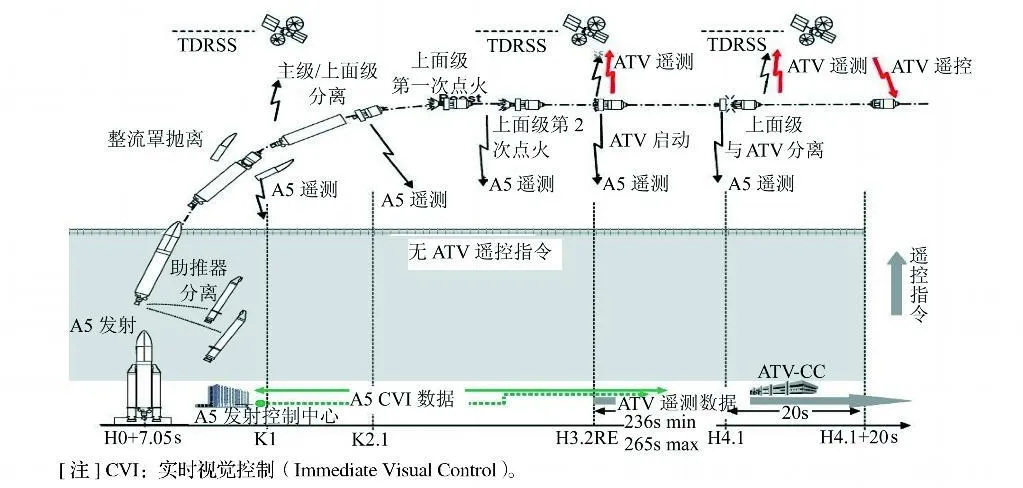
图6 ATV 发射序列事件[11]Fig.6 ATV launch sequence

图7 ATV 标称飞行程序[11]Fig.7 ATV nominal flight procedure
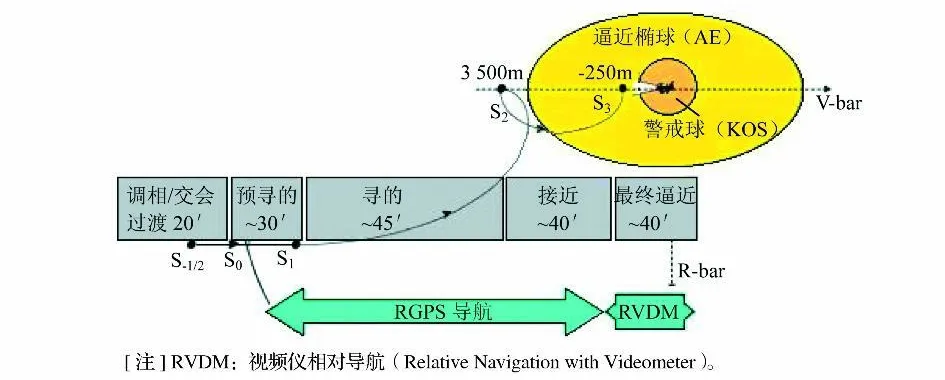
图8 ATV交会阶段与逼近椭球及警戒球[12]Fig.8 ATV rendezvous phase and Approach Ellipsoid and Keep-Out S phere

图9 ATV 近距交会与警戒球及逼近走廊[12]Fig.9 ATV close rendezvous and Keep-Out Sphere and Approach Corridor
4)连接阶段(Attached Phase)。ATV 被连接到ISS 上,对ISS 执行所要求的服务。在这一阶段,ATV FLC 与RMCA不工作。ATV 进入“休眠模式”(dormant mode),仅执行ATV分系统的热控制。
5)解除对接与离开阶段(Dedocking and Departure Phase)。ATV 以一次助推离开ISS的邻近区域。在这个阶段,主系统功能RM CA最后一次处于激活状态。
6)降轨与再入阶段(De-orbitation and Re-entry Phase):在经历轨道转移与途中机动后,通过2次助推进行降轨,并执行受控毁坏性大气再入。

图10 ATV 最终逼近第2 段(S4 至对接)[7]Fig.10 ATV Final Approach 2(from S4 to docking)
在初轨与调相阶段以及分离后的降轨阶段,一般用地心轨道要素描述ATV 相对地心的(绝对)运动;在交会阶段与分离阶段,一般用Hill 坐标描述ATV 相对ISS的(相对)运动[2]。为便于理解ATV接近ISS的飞行过程,将ATV 射入初始轨道后直至与ISS 对接的飞行程序,均以相对ISS的位置变化表示在图7中。
2.5 ISS 安全区与界沿带[7,12]
为确保交会与分离过程中的避撞安全性,对不同飞行阶段,设定3个限行的安全区(Safety Zones),即“逼近椭球”(AE)、“警戒球”(KOS)与“逼近走廊”(AC),以及禁入的“界沿带”(Clearance Corridor)。
1)逼近椭球(AE)(见图8)。中心位于ISS 质心的4km×2km×2km 的椭球,长轴沿V-bar(Hill系x 轴),短轴沿R-bar(Hill 系z 轴)与H-bar(Hill系y 轴)。原则上,在保持点S2前(主要针对寻的段),ATV 轨迹不得进入逼近椭球。
2)警戒球(KOS)(见图9)。KOS 中心位于ISS质心,圆球半径为200m。原则上,保持点S3前(主要针对接近段),ATV 轨迹不得进入警戒球。
3)逼近走廊(AC)(见图9与图10)。AC 呈圆锥形,位于警戒球内,开口在警戒球面。在最终逼近第1 段(保持点S4前),AC 以V-bar为中心线,半锥角为8°;在最终逼近第2 段(S4至对接的最后20m),AC 以“对接单元接口平面”(DUP)纵轴为中心线,半锥角为4°。
4)界沿带(Clearance Corridor)(见图11)。界沿带由ISS DUP(对接单元被动部分)界面与ISS 包络面界定。在ATV 与ISS 对接运作与解除对接运作(ATV 与ISS分离)期间,ATV 的任何部分不得侵犯“界沿带”。

图11 ISS 对接口“界沿带”[7]Fig.11 Clearance Corridor of the ISS docking port
“逼近椭球”,“警戒球”与“逼近走廊”主要是对ATV 质心运动轨迹的约束;而“界沿带”则不仅针对ATV 对接杆头部的运动,也是对ATV 姿态运动提出的安全性限制。除了在飞行器标称制导设计时应考虑安全轨迹外,在实际飞行期间,将由三重监视(MVM FDIR,FCM,PFS)及应急机动(逃离与避撞机动)确保ISS的安全性。特别是,“避撞机动”(CAM)不仅可由ATV 自主触发,还可由地面ATV-CC 或ISS 乘员应用“红按钮CAM”(Red Button CAM)触发。CAM是最后应用的安全性手段。CAM是逆向助推(5m/s),它使ATV 以安全方式离开ISS 达24h,无返回ISS 附近区域的危险。CAM 由专用计算机“监测与安全保障单元”(MSU)管理,而MSU 独立于ATV 中心计算机(FTC)。在CAM 后,飞行器进入“安全模式”,在FTC可继续运作情况下,FTC 须重新启动,并重新注入相关的飞行信息。
2.6 小结
ATV 使命结构体系由“ATV系统”(内部实体)和“外部实体”两大部分构成。“ATV系统”包括ATV 飞行部分和地面部分,“外部实体”为发射ATV 与支持ATV 飞行的所有系统及其设施。以ATV-CC为中心的地面飞行控制系统,中继卫星网,GPS导航系统,以及ATV 与ISS 之间的邻近链路,确保飞行控制任务顺利完成。
ATV 的功能体系分为两级,第1级为“主系统功能”;第2级为实现“主系统功能”的硬件与软件集成单元。第2级的“功能单元”(FU)包含硬件,也含软件;而“软件单元”(SU)仅含软件。
设定ISS“逼近椭球”,“警戒球”,“逼近走廊”特定区域及其准入条件,通过应急机动,可摒弃可能出现的不安全轨迹,避免ATV 与ISS 碰撞危险。“界沿带”针对对接运作与分离期间的对接机构相对位置提出约束;在此期间,ATV 的任何部位不得侵犯“界沿带”,因此,这也是对ATV 对接杆头部运动与ATV 相对姿态运动提出的约束。
3 飞行控制策略
这里需要说明的是,对ATV 使命,广义的飞行控制涵盖“飞行控制”(FLC)与“交会监测与避撞”(RM CA),以及“飞行器指令与控制”(VCC)等功能。狭义的飞行控制特指“飞行控制”(FLC)。“飞行控制”(FLC)负责实现正常情况下使命目标的飞行控制与计划的应急管理;“交会监测与避撞”(RM CA)主要应对FLC 未能检测出的故障,施加应急机动,确保飞行安全。如前所述,RMCA包括软件单元“飞行控制监测”(FCM)与功能单元“邻近飞行安全性”(PFS)。
3.1 导航功能[7,12]
ATV 姿态控制要应对所有飞行阶段的大量的姿态机动与轨道机动,因此,在整个使命期间,ATV绝对姿态与角速率估计值,要以很高的可靠性自主连续地获得。调相机动是由地面ATV-CC 计算的,ATV 绝对位置与速度也要在地面被估计,因此,ATV 接收到的GPS 粗数据需下传到地面ATV-CC。在邻近运作期间(交会对接阶段及解除对接后的分离阶段),相对状态矢量在ATV 上获得,且邻近运作需遵从ISS 邻近区域安全性要求。远距交会仅需控制ATV 对ISS 质心的相对位置与速度,而近距交会(最终逼近)需考虑对接机构主动部分(ATV DUA)与被动部分(ISS DUP)之间的相对状态,包括最后约20m的相对姿态。对远距交会,自然选择相对GPS导航;而近距交会应用光学敏感器相对导航,以满足最终逼近GNC 的更高的精度要求。ATV 飞行期间的导航功能如表2和图12所示。

表2 ATV 飞行期间的导航功能[12]Table2 ATV navigation function during flight phases
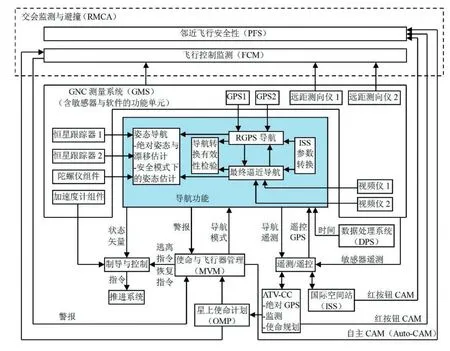
图12 ATV 飞行控制中的导航功能Fig.12 ATV navigation function in flight control
1)全程绝对姿态导航。在整个飞行期间,应用“绝对姿态与漂移估计”(AADE),连续估计飞行器姿态与角速率。AADE 应用来自“陀螺仪组件”(GYRA)与“恒星跟踪器”(S TR)的数据,G YRA测量信息用于姿态传播,而ST R 测量信息用于姿态更新。AADE 功能基于“陀螺-星体滤波器”的“传播-更新”方案,3个并行滤波器执行姿态与陀螺漂移的精确估计,并具有1次故障或2次故障后的自主重构能力。ATV 绝对姿态精度满足交会敏感器指向及ISS 安全性“逼近走廊”的要求。在“安全”模式,专用“安全模式姿态估计”(AES)功能能够以敏感器减少的降格模式,在与地面无任何联系的情况下,提供完备的姿态与角速率解。
2)调相段绝对位置导航。轨道调相期间,应用星上GPS 接收机的遥测数据,在地面执行绝对位置与速度估计。
3)远距交会相对位置导航。远距交会(预寻的,寻的,接近段)期间,应用相对GPS(RGPS)导航。星上卡尔曼滤波器应用ATV GPS 与ISS GPS 原始测量数据,仅对ATV 相对轨迹的状态矢量提供自主导航功能。GPS导航卫星的原始测量数据(伪距与岁差动)是精确同步的,求差可消除电离层误差。软件单元“飞行控制监测”(FCM)应用ATV GPS与ISS GPS的精确解(PVt)作为监测相对轨迹的独立手段(见图13)。此外,ISS 上的俄罗斯微波雷达基底系统Kurs 在保持点S2(在ISS 之后3.5km)启动,用于ISS 乘员的轨迹监测。

图13 用于GNC-RGPS 和FCM-ΔPVt(相对GPS PVt)的不同的GPS 卫星跟踪[7]Fig.13 Different GPS satellites tracking used in GNC-RGPS and FCM-ΔPVt
4)近距交会相对位置与相对姿态导航。从保持点S3(在ISS 之后250m)直至对接为近距交会段(最终逼近段),这一段应用光学交会敏感器,即“视频仪”(VDM)与“远距测向仪”(TGM)。源自VDM测量信息的相对状态(相对位置与相对姿态)估计用于标称GNC 控制。从250m到20m(S3至S4)沿Vbar 方向的逼近应用Far-RVDM;在最后20m(S4至对接)沿对接港轴逼近,应用Close-RVDM。VDM数据经导航滤波器与故障探测、隔离与修复(FDIR)算法处理,给出对接单元的主动部分(ATV DUA)与被动部分(ISS DUP)之间的相对位移与相对速度,以及在最后20m 内的相对姿态。TGM 测量信息则用于“飞行控制监测”(FCM)对相对位移与相对速度的监测。
“视频仪”(VDM)与“远距测向仪”(TGM)是基于光学敏感器与激光脉冲波的崭新的相对导航技术。VDM 原理如下:激光照射安装在ISS“星辰”(Zvezda)舱后端的“交会靶标”(Rendezvous Target,RT)反射器,导致RT 在VDM CCD 上成像,RT 图像经处理可提供测距,视线(LOS)角,以及相对姿态的测量信息。TGM是主动光电测量系统。TGM 测距测量基于飞行时间的测量,而TGM 视线(方向)测量是由生成激光扫描的反射镜的角位置给出的。这样,从最后300m(当ATV 面向ISS)直至对接,ATV可跟踪这些目标。VDM 在标称GNC环路中运作,并提供必要的FDIR层次;而TGM 以独立的FCM 链用于GNC 监测。在相距20m 处,位置估计的精度为几十厘米(一般而言,距离越近,精度越高)。
5)“导航转换有效性检验”(N TVC)。NTVC评定交会(逼近与后撤)过程中连续导航链的有效性与一致性,即通过同时处理导航输出,确认导航模式RGPS/Far-RVDM/C lose-RVDM 之间的转换。
6)“ISS 参数换算”(IPC)。IPC 功能与ISS GPS 数据连接,以计算ISS“当地水平与当地垂线”(LVLH)指向与ISS 姿态,并用于ATV 绝对位置与速度计算的AGPS 解。
上述功能经由“GNC 测量系统”(GM S)软件与导航敏感器相连。GM S 软件处理来自硬件(敏感器)的粗输出,并发送所要求的功能数据,这些数据与多种“故障探测与隔离”(FDI)报告相关。基于全冗余硬件,导航算法不仅可给出最佳估计值,而且具有多层“故障探测、隔离与修复”(FDIR)能力,保证故障情况下状态矢量的连续性。所有这些自主导航功能还向“ATV 控制中心”(ATV-CC)提供高水准的监测与控制。
3.2 飞行控制[7,13-14]
3.2.1 主系统功能“飞行控制”
ATV 主系统功能“飞行控制”(FLC)承担星上标称飞行控制任务:1)标称轨道(轨迹)控制:在标称模式下,在ATV 射入轨道后实现与ISS 交会对接,以及从ISS分离直到受控毁坏性大气再入;2)标称姿态控制:按天线指向,太阳电池阵对日定向,推进方向,以及对接系统要求等控制ATV 姿态。
“飞行控制”(FLC)由功能单元“GNC 测量系统”(GMS),软件单元“制导、导航与控制”(GNC),软件单元“参照系服务”(FRM S),以及功能单元“推进系统”(PRO)实现。GMS 提供ATV 动力学的敏感器测量数据(信息)并管理相关故障。FRM S 给出太阳方向与当地轨道系(LOF)估计。GNC 接收来自GM S的测量信息,应用FRMS 提供的资料估计ATV 运动学状态(导航),计算被引导的运动学指令(制导),以及给推进系统下达动力学指令,即推力器点火指令(控制)。PRO 不仅执行GNC 作出的推力器指令,也向GNC 提供质量估计,质心位置与惯量,适用推进配置,以及可供给的冲量估计等信息。
6 类GM S 敏感器感知飞行状态(位置与姿态)及状态变化(速度与角速率),而与PRO“推进驱动电子设备”(PDE)硬线相连的32台推力器是飞控系统的执行机构,最终执行飞行器的轨道机动与姿态机动。由GMS 敏感器的观测资料,至最后生成推力器的控制指令,是由主系统功能“飞行控制”(FLC)中的软件部分(即GMS 软件,GNC,FRM S,PRO 软件)完成的。FLC 中的所有软件均在“故障容限计算机”(FTC)中运行,FTC 包含3台数据处理器(DPU)。由ATV 推力器生成的力与力矩,通过ATV 动力学效应,按ATV 动力学规律改变ATV 的飞行状态(飞行轨道与飞行器姿态),被GM S 敏感器感知,构成闭环控制链(见图14)。
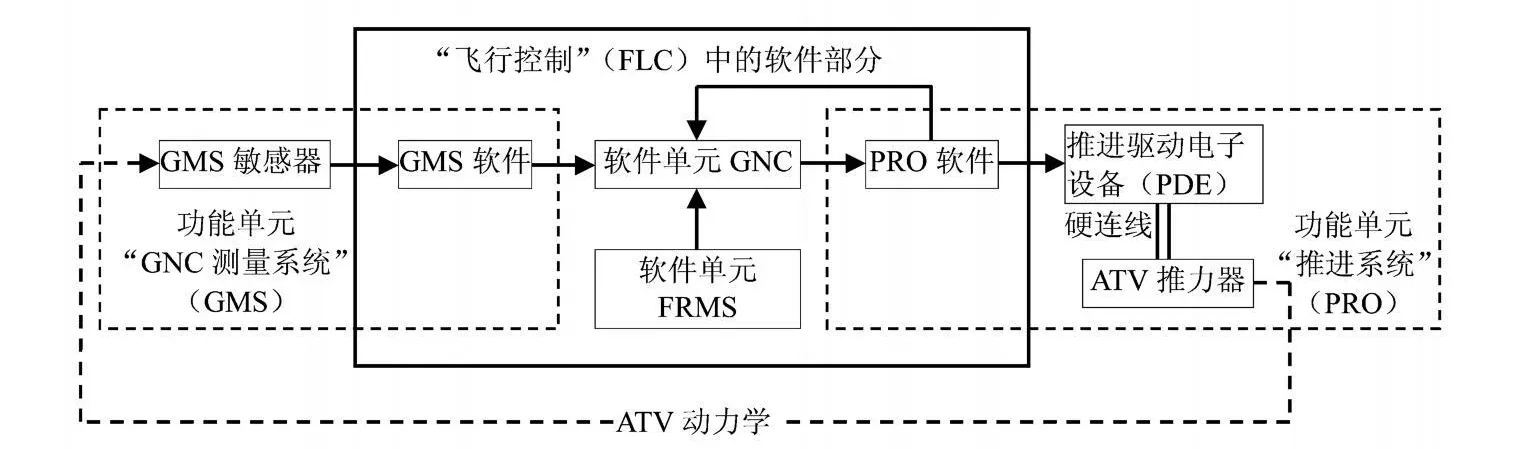
图14 ATV 飞行控制(FLC)闭环框图Fig.14 ATV flight control closed-loop
3.2.2 标称GNC
3.2.2.1 标称GNC 功能ATV 飞行器软件单元“制导、导航与控制”(GNC)是主系统功能“飞行控制”(FLC)的核心部分。其中,导航功能应用“GNC 测量系统”(GM S)导航敏感器提供的实时测量信息,执行规定参照系中现时姿态与位置的估计,提供给制导与控制功能。制导功能依据导航功能提供的飞行器当前状态(current state)计算导向飞行器目标状态(aimed state)的运动学指令(如速度增量),提供给控制功能。控制功能依据导航功能提供的当前状态(初始运动学状态)与制导功能提供的运动学导引指令,计算动力学指令(控制力与控制力矩),选择推力器并确定其工作时间,生成推力器点火指令,提供给“推进系统”(PRO)。
3.2.2.2 ATV GNC 特点
ATV GNC是飞行控制系统的组成部分,标称GNC 的主要特点如下:
1)陀螺/恒星(Gyro/Stellar)姿态导航具有不连续的比例微分(PD)或比例积分微分(PID)姿态控制器,包括对偏移模式(bending modes)的带通滤波器(bandpass filter)以及带有卡尔曼估计器的干扰力矩估计。
2)相对GPS 卡尔曼滤波器基于ATV 与ISS 之间的原始测量数据(伪测距与多普勒计数)之差的应用,以及C-W 线性化交会方程,应对远距交会制导。
3)近距交会(最终逼近段)导航(轨道与姿态)应用光学敏感器VDM ,配合H-infinity 近距交会控制器,以及可满足“保持/再继续/后撤”需求的制导方案(参见图15)。
4)基于力/力矩表的“推力器管理功能”(TMF)负责推力器选择,将力与力矩需求转化为点火指令。
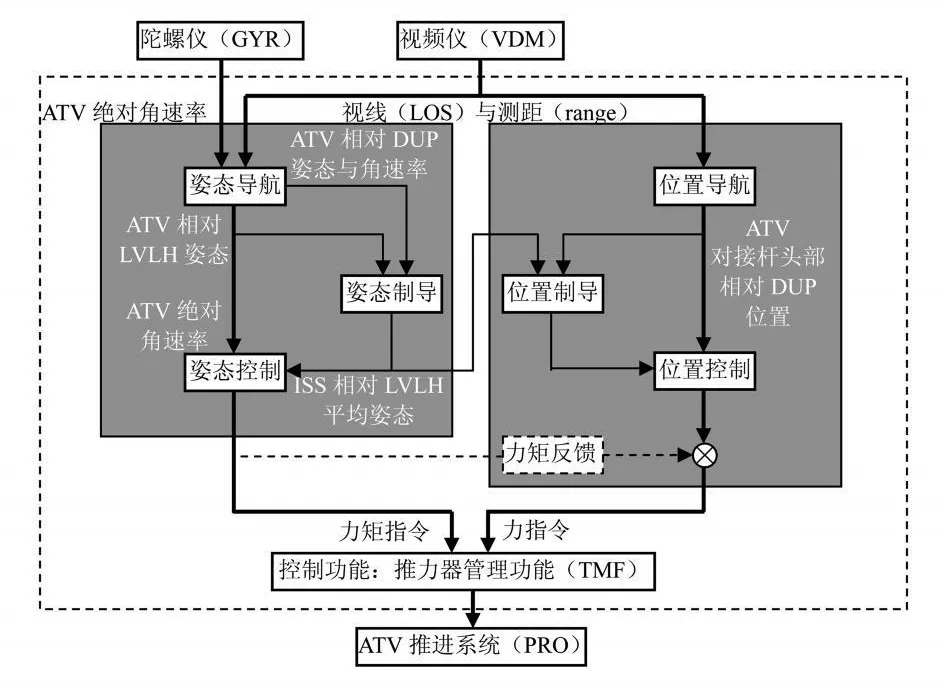
图15 ATV 最终逼近段标称GNC 姿态与位置策略[13]Fig.15 ATV nominal GNC attitude and position st rategy in Final Approach
5)GNC 也赋予飞行器“故障探测、隔离与修复”(FDIR)功能:在成功检测出异常后,GNC 向“使命与飞行器管理”(MVM)发出警报信号,并转而施加随后由MVM 要求的恢复动作。而且,GNC 某些重要参数经遥测被发送至地面,使ATV-CC可监视飞行。
图16表示ATV GNC 的体系结构。
3.2.2.3 故障容限要求
关于故障容限,ATV GNC 满足下列要求:
1)在1次故障检出后,或在设备不同部件的2次故障情况下(连续的单一失效),ATV GNC算法保持运行,可完成当时正在进行的运作。
2)在导致失去标称与冗余设备双硬件故障情况下,或1次硬件故障接着1次软件故障情况下,或1次软件故障之后,ATV GNC 仍可适合于触发飞行器的“安全模式”。

图16 ATV GNC 体系结构[14]Fig.16 ATV GNC architecture
3.2.3 标称飞行控制操作
地面/ATV 上任务分配在使命期间的转变,取决于相应阶段飞行动力学反应时间的重要性。基本上,ATV 自主性在交会期间增强,以更好地应对反应性与安全性。地面/ATV 上任务分配综合如下:
1)在交会以外的自由飞行期间:ATV-CC 执行ATV 绝对轨道测定,制定助推策略与预见的机动特性(长期制导);随后的使命计划被上传到ATV 上,然后施加被要求的机动(姿态导航,短期制导,控制)。
2)在交会阶段:ATV 自主执行姿态与轨迹测定,在星上计算要实现的机动(自主GNC);ATVCC 在使命的特定阶段发送“GO”授权。
3)在紧急与(或)ISS 安全性受危害情况下,ATV-CC 执行飞行器的地面监测与触发重构或其他机动。地面任务在“ATV 控制中心”(ATV-CC)执行。ISS 乘员也部分涉入ATV 使命(交会、分离),主要为最后的交会监测目的。连接ATV 的不同的通信链路如图2所示。
标称GNC 接收下列3 类指令:
1)模式指令(主要包括在“ATV 上使命计划”(OM P)中):某些GNC 模式需要指令参数(助推/转动取向,ΔV 等),其他自主运作。
2)软件控制(主要包含在OM P 中):更新GNC内部数据。
3)低阶指令(LLC):由地面发送,主要用于应急情况,更新内部GNC 参数。
上述所有指令包括在地面“飞行器控制流程”(VCP)中,或ATV“星上使命计划”(OM P)中。例如,对RGPS的初始相对状态矢量和协方差(协变量)应由ATV-CC 经LLC 以规定的精度提供。轨道助推参数按模量与方向在地面被确定,并在OM P中发送。轨道控制参照系(参数)经VCP 或OMP发送。
ATV-CC 对标称GNC 的监测是作为星上机构的补充,ATV-CC 通过专用的地面“飞行器控制流程”(VCP)触发地面警报与相关的恢复指令。GNC自身监测某些算法(特别是导航算法)的运行情况,它与GMS 测量信息接口。星上警报基于对内部GNC 数据的观测,直接在GNC算法中实现。最经常的情况是,在失效情况下,“恢复”是在星上决定的,根据具体情况进行局部重构,改变使命计划,执行逃离机动、撤退、或转向安全状态。在特定的使命阶段,“恢复”行动也可能不在ATV 上管理,而是将有关信息报告发送给ATV-CC,由地面作出适当的反应。地面警报基于对遥测数据的观测。如果参数值不正确(超越阈值),则地面警报由ATV-CC 生成,并经由应急“飞行器控制流程”(VCP)触发应对动作。
3.3 飞行控制监测(FCM)[7]
“飞行控制监测”(FCM)是“飞行应用软件”(FAS)的一部分,FAS 在“故障容限计算机”(FTC)中运作。在ATV 硬件或软件的故障未能被ATV上“故障探测、隔离与修复”(FDIR)检测出的情况下,FCM 基于专用导航敏感器测量信息与特殊算法,可检测ATV 的异常行为,这种异常行为有可能导致危害ISS的不安全轨道。当危急状况被检测出,FCM 向软件单元“使命与飞行器管理”(MVM)发出警示信号,从而触发等待机动,逃离机动,或CAM ,这取决于被检测出的故障及使命所处的阶段。因此,对标称GNC 内不能检测出的任何故障,如控制软件故障,FCM 提供了故障检测补充,增强飞行安全性。
3.3.1 FCM 功能
FCM 的主要目的是:1)不依赖标称GNC 功能评定飞行器飞行控制性能;2)就相应使命阶段监测ATV 状态矢量,满足安全性需求,即ATV 应在任何1次故障后保持运作(1FT),在2次故障后保持安全(2FT)。因此,FCM 具有将ATV 置于安全轨迹上的应急机动能力:1)在S1之前:等待机动(由GNC 控制的自由漂移);2)在S1与对接之间:逃离机动(由GNC 控制,沿V-bar 方向,ΔV=-4m/s);3)在逃离或分离期间:CAM 机动(由MSU 控制,沿V-bar 方向,ΔV=-5m/s)。
FCM是FAS的一个软件单元,这意味着没有硬件被FCM 直接遥控。所有被FCM 应用的硬件(即多种导航敏感器),由“GNC 测量系统”(GMS)启动;同时GM S 也应用“机内测试设备”(BITE)与外部一致性检验,对这些敏感器进行“故障探测、隔离与修复”(FDIR)。FCM 本身应用GM S 提供的有效数据,监测算法,检测故障。当FCM 检测出设备或系统的故障后,便向MVM 发出“警报”,触发应急机动。在到达S3前,在FCM 警报后触发的任一应急机动(逃离机动,或CAM)后,在短期限内不得进入“警戒球”(KOS);在近距交会(最终逼近与对接)与分离期间,应急机动轨迹不与“界沿带”(clearance corridor)相交。
FCM 的特点在于应用不同于GNC 的专用方法监测ATV 状态矢量,从而可在GNC FDIR 未能检测出故障的情况下发现故障。FCM 的主要特性如下:1)在交会、分离与可能的应急逃离机动期间,应用ACCA测量,监测GNC 指令的所有助推。2)在S1与S3参照点之间,应用ATV/ISS GPS PV t信息与ACCA测量信息,借助固定增益卡尔曼滤波器,监测ATV 相对ISS 质心的相对状态矢量(位置与速度)。3)在S3与对接之间,应用TGM 测距与视线(LOS)信息及ACCA测量信息,监测相对“ISS俄罗斯对接港”(DUP)的ATV 相对状态矢量。
3.3.2 专用导航设备
相对标称GNC,FCM 或是应用不同的导航敏感器,或是应用不同的算法。除了应用GYRA与S TR 姿态导航,无GNC 输出被用于FCM 状态矢量的生成,这是因为按设计绝对姿态导航具有高度坚固性(2FT)。在不同阶段,FCM 应用的导航敏感器是:1)专用于RM CA的“加速度计组件”(ACCA);2)“远距测向仪”(TGM):热备份的2个敏感器,从S3至对接可用;3)GPS PVt 测量信息:在远距交会(从S0至S3)期间,ISS GPS 数据(通过邻近链路向ATV 传送)与2台ATV GPS 接收机(处于热备份)被GNC 与FCM 应用;但GNC 对它自己的RGPS导航滤波器应用共用卫星的粗数据,而FCM 应用接收机直接提供的PV t 解(参见图12)。
当隔离在GMS级的第1个敏感器失效后,FCM 功能应用备份的敏感器保持运作。在同类型敏感器第2个硬件失效后(如双加速度计失效,双GPS 接收机失效,或双TGM 失效),与失效敏感器相关的FCM 服务停止。故障被GM S 和FDIR 检测出后,即使GNC 及其相关的敏感器运作正确,使命也因“等待机动”或“逃离机动”的执行而中断。对给定的ATV 飞行阶段,FCM 监测策略依赖要实现的ISS 安全性区域,现时ATV 动力学,应急机动(漂移、逃离与避撞机动)能力,以及所应用的导航敏感器的性能。
3.4 邻近飞行安全性(PFS)[7]
功能单元“邻近飞行安全性”(PFS)提供最终安全性监测与避撞机动功能。PFS 应用A级软件(class ASW),在与“故障容限计算机”分隔开的“监测与安全保障单元”(MSU)上运行,MSU 具有专用计算机与GNC 软件。在邻近运作期间出现ATV双故障情况下,PFS 功能将触发“避撞机动”(CAM),使飞行器在安全轨道上保持至少24h。
3.4.1 PFS 功能
“邻近飞行安全性”(PFS)包括:1)专用数据管理系统“监测与安全保障单元”(MSU),该系统与“故障容限计算机”(FTC)分隔开;2)专用电能源(不可再充电蓄电池);3)专用“推进驱动电子设备”(PDE)CAM 转换器(在CAM 执行期间,封闭PDE标称激励器);4)与陀螺仪(DTG)、通信处理格式器(Communication Processor Formatter,CPF)及太阳敏感器单元(SS U)相连的专用接口;5)PFS 专用的独立于标称GNC 的控制CAM 的推力器(4个备用制动推力器)。CAM可由自主检测触发,也可被ISS 乘员触发,或由ATV-CC 触发。PFS 除了应用陀螺仪(DTG)外,还应用专用太阳敏感器单元(SSU)保证CAM 后的24小时期间的安全姿态控制。为了涵盖主系统功能“飞行控制”(FLC)不能保证相对ISS 安全轨迹的极端情况(某些双故障出现,FTC SW 失效等),“邻近飞行安全性”(PFS)功能在使命的自由飞行阶段期间被启动,从S3至对接以及在分离段,可遏制对ISS 不安全的自由漂移轨迹。
3.4.2 PFS 原理与特性
“邻近飞行安全性”(PFS)功能依据下列原理:
1)PFS 与标称飞行控制及其监测链分隔开,特别是与FAS分隔开,这是为了对任何标称链构型,PFS可被启动。特别是PFS 功能体包括专用数据处理单元,即“监测与安全保障单元”(MSU)(不同于DPU/FTC)以及专用电源。
2)整体单故障容限指令能力与ATV-CC/ISS观测能力,通过专用链路,在MSU/CPF 接口处得到保证。
3)两个MSU 通道以热备份形式被实现,称为MSU1(主)与MSU2(备)。每个MSU 通道可指令4个相同的专用制动推力器,这是通过CAM“推进驱动电子设备”(PDE)中的专用驱动器实现的,不依赖于标称PRO“推进驱动电子设备”(PDE)。两个MSU 通道在相同时间执行相同运作(“热”冗余),MSU1(主)在需要时指令CAM ,而MSU2(备)控制MSU1 的健康状态并可取代MSU1(主)。然而,一旦CAM 被触发,则在MSU1 与MSU2 之间不可能转换。因此,CAM 执行与随后的Post-CAM 姿态控制是零故障容限(0FT)。
4)装备MSU 的计算机软件(MSU SW)归类为“A级软件”(Asoftw are),以确保正确执行(相比之下,FAS 归类为“C级软件”)。它是欧洲空间工业中首个制作的A级软件。
5)4个“干式调谐陀螺仪”(DTG)虽不是专用于PFS,但具有PFS 专用接口(电源,指令与监测)。这些接口使DTG 即使在失去其他电子设备链的情况下也能保持工作。2个DTG(每个DTG 提供2轴测量资料)连向每个MSU 通道,在每个MSU 通道独立提供姿态导航与故障探测/隔离能力。
6)每个MSU 连通一个专用“太阳敏感器单元”(SSU),允许在Post-CAM 执行期间实现太阳指向姿态控制。
PFS 执行的CAM是确保飞行安全(不碰撞ISS)的最后的关键动作,CAM 应在2次故障情况下仍可触发。为此,如上所述,PFS 具有以下很强的独立性:1)PFS 具有专用数据处理系统,即“监测与安全保障单元”(MSU),这是一个与“故障容限计算机”(FTC,由3台DPU 组成)分开的独立的系统;2)CAM 应用独立于GNC 的推力器;3)具有独立的“太阳敏感器单元”(SS U)。
在MSU 软件内,MSU-GNC算法负责:1)在CAM 之前与CAM卷间,计算ATV 姿态与姿态速率;2)监测专设的ATV 运动学走廊,这是为了在出现异常状态时触发Auto-CAM ,并且,最重要的是,在CAM 自身失效之前触发Auto-CAM;3)依据速度、姿态与姿态率,控制CAM ΔV 的供给量,并且,在Post-CAM 阶段期间,控制捕获太阳的机动以及此后保持太阳指向姿态的机动。
3.5 飞行使命控制链
整个ATV 飞行使命控制链基本可用图17与图18表示。图17表示星上控制链的主要部分(FLC,MVM,FCM ,PFS)之间的关系,以及与导航敏感器、ATV 推进系统之间的关系。图18表示飞行使命控制链的总体设计理念。
3.6 小结
1)在标称自主飞行中,ATV 姿态与轨道控制是由主系统功能“飞行控制”(FLC)实现的。FLC 应用导航敏感器与作动机构等硬件;而FLC 中的软件部分包含GNC,FRM S,以及GMS 与PRO 中的软件单元。
2)“飞行控制监测”(FCM)依据专用导航敏感器信息,检测可能导致不安全轨迹的异常情况,向“使命与飞行器管理”(MVM)发出警示信号,以增强ATV 故障检测能力。
3)“使命与飞行器管理”(MVM)负责飞行阶段与GNC 模式的管理,具有飞行器系统FDIR 与导航敏感器FDIR 功能,并可对“逃离”与“避撞机动”(CAM)作出选择。
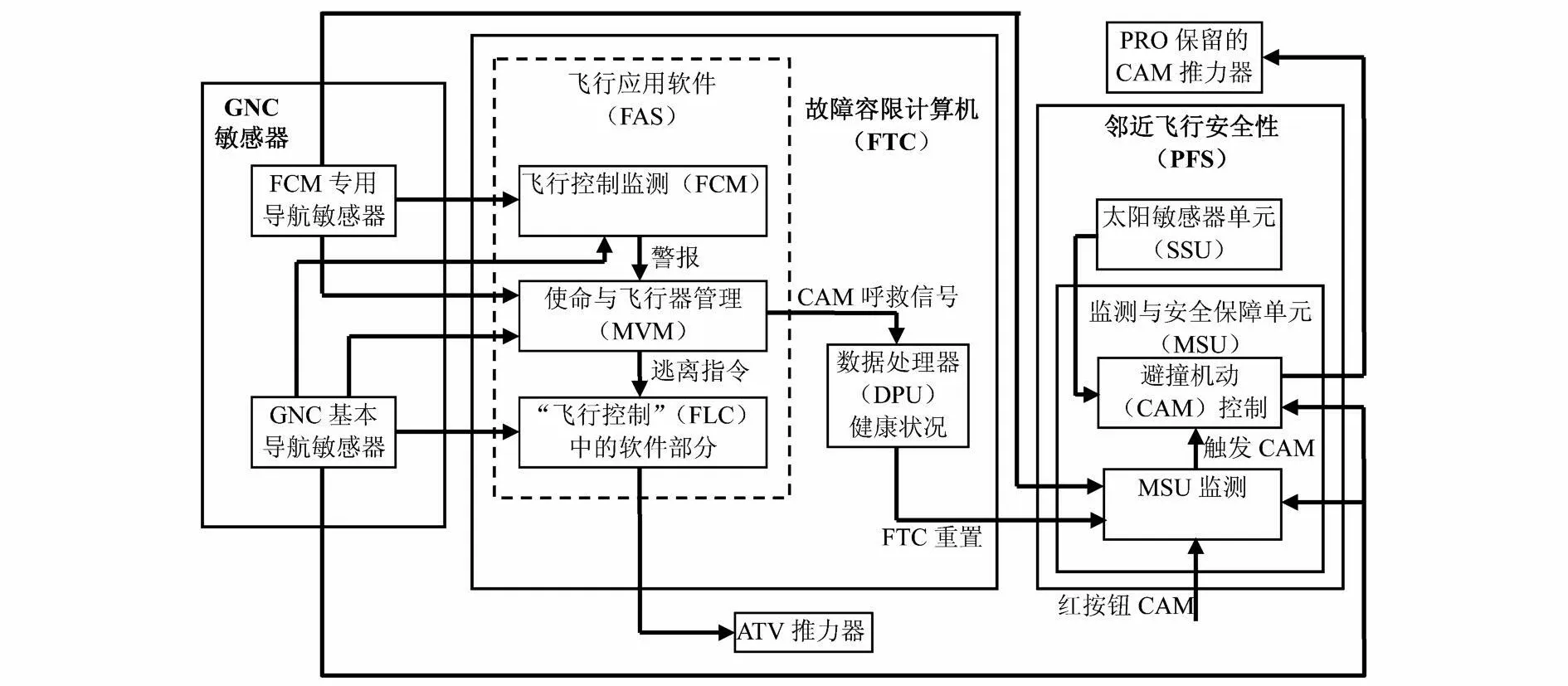
图17 主系统功能“飞行控制”与“交会监测与避撞”总体概念[7]Fig.17 Overall concept of ATV FLC-RMCAmain functions

图18 ATV 飞行使命控制链设计理念Fig.18 Design concept of the flight control chain for ATV mission
4)FCM,MVM ,以及FLC 中的软件组成“飞行应用软件”(FAS)。FAS 在“数据处理系统”(DPS)中的“故障容限计算机”(FTC)上运作。FAS 与FTC是ATV 标称飞行系统的重要组成部分,为ATV 正常飞行提供保障。
5)在ISS 邻近区域飞行期间,包括交会阶段与解除对接后的分离阶段,根据不同阶段导航精度的要求,应用多种相对导航与飞行监测方法,使飞行器具有自主执行交会飞行使命的能力。
6)“邻近飞行安全性”(PFS)可在必要时以其单独的计算机(MSU)(MSU 与FTC分隔开)接替ATV 控制任务。MSU 具有自己的GNC 软件,并可指令“避撞机动”(CAM),确保飞行安全。
7)ATV 本身设置了3层故障检测与应急避险措施(MVM FDIR,FCM ,PFS),可自主触发CAM(Auto-CAM);不仅如此,ATV-CC 与ISS 乘员也参与相对轨迹监测,并可在紧急情况下直接触发避撞机动(红按钮CAM)。ATV 飞行控制策略最大限度地免除不安全轨迹,避免ATV 与ISS 碰撞的危险。
4 AT V-JV 飞行演示
第1个ATV(ATV-1)以法国19 世纪著名科幻作家(儒勒·凡尔纳)Jules Verne,(1828—1905年)命名,即ATV-Jules Verne(ATV-JV)。ATV-JV是欧洲第1个执行轨道交会的航天器,于2008年3月9日由阿里安-5(A5)火箭发射,同年4月3日与“国际空间站”(ISS)自主对接后成功地连接在一起,成为ISS的一个舱段,为ISS 提供服务。2008年9月5日,ATV 从ISS 飞离;9月29日,按预定计划在南太平洋地球大气再入期间解体毁坏。按设计要求,ATV-JV 负有双重使命:1)执行自动调相,交会对接,提升ISS 高度(演示回避碎片能力),以及解除对接、分离、降轨与再入机动,并进行一系列附加的飞行控制验证演示;2)向空间站乘员补充给养,向ISS 提供推进剂、气体与水,并卸载ISS 废弃物。ATV-JV 飞行演示的主要目的是:1)验证星上自主交会对接功能;2)验证保证ISS 安全的应急机动能力。ATV-JV 加载了6t 推进剂,用来支持验证飞行以及向ISS 提供推进支持(提升轨道高度);此外,ATV-JV 载运了860kg 燃料、270kg 水、20kg 氧,以及总重为1.3t 的干货,在ATV-JV 与ISS 连接期间,从ATV-JV 转移给ISS。
如前所述,一般的ATV 使命覆盖6个阶段:1)发射与初轨阶段(LEOP);2)调相;3)交会;4)连接;5)分离;6)降轨与再入。然而,包含验证目的的ATV-JV 使命覆盖几个不同的阶段:1)LEOP ;2)调相及“避撞机动”(CAM)等演示;3)演示日1;4)演示日2;5)演示日3(交会对接日);6)连接及再助推与姿控能力演示;7)分离;8)降轨与再入。
4.1 发射与初轨阶段[8,15]
发射与初轨阶段涵盖了运载火箭使命和ATV射入初轨后的最初几个小时,这几个小时包括ATV调相初始化运作。ATV-JV 发射时间为2008年3月9日,04 ∶03UT(世界时)。发射场位于法属圭亚那的库鲁(Kourou);仅有1 天的发射机会,称为“发射缝隙”(launch slot)。A5 第2级(上面级)是进行轨道圆化,避免低高度的无控再入。初轨高度约为260km,倾角与ISS 相同,为51.6°。在ATV/A5分离前4min,ATV 起动,发送遥测数据。初轨阶段由“星上使命计划”(OMP)自动管理。ATV 在发射塔上发射前几小时,OM P 由ATV-CC 向ATV 输入。一旦进入轨道,ATV 执行输入的OM P 以及ATVCC 发送的一些遥控指令(为GPS 引导的轨道参数)。下列运作被执行:1)启动序列;2)恒星跟踪器的选择与预热;3)太阳电池阵展开;4)“邻近链路”(Proximity Link)天线的展开;5)GPS 引导;6)姿态定向;7)向“偏航导引”(YS)姿态模式变换。对地面设施,最初的轨道计算基于GPS 数据,并与TDRSS跟踪数据相关。
4.2 调相阶段[8,15]
调相段目的是以要求的精度将ATV 从交付轨道(运载火箭射入的初轨)转移到ISS 附近,以便星上GNC 能够自主执行与ISS的交会对接。ATVCC 作出转移机动计算并发出机动指令。在调相期间,进行“避撞机动”(CAM)演示。
调相期间验证的功能是“演示日1”执行安全逼近与“逃离”演示的关键项目,即:1)姿态控制:验证ATV 在“偏航导引”姿态模式,“地球指向”模式,以及在两种姿态模式转动机动期间,具有期望精度的姿态控制能力。2)绝对GPS:验证ATV-CC 以ATV G PS 测量信息执行轨道导航的能力,验证ATV 上接收机PVt 解的高品质。3)轨道控制:验证ATV 以期望精度执行类似“逃离”的轨道机动的能力。4)“避撞机动”(CAM):CAM是调相段期间的主要演示项目。CAM是确保ISS 安全性的最后措施。
图19表示ATV-JV 的调相与停泊程序。停泊点位于V-bar,在空间站之前2 000km。设置停泊点是为了避开航天飞机S TS 123 的返回飞行。就在S TS 123 着陆后,ATV-JV 离开停泊点,进入ISS 之上的12km 高度的轨道,从而使ATV 以约75km/h的相对速度漂移到ISS的后面,并执行转移机动,到达航向点S-1/2(AGPS 向RGPS导航的过渡点),从S-1/2点开始“演示日1”。
ATV-JV 避撞机动是5m/s 的逆向机动,CAM之后,飞行器进入安全模式,安全模式是一个不超过24h 的零故障容限状态。CAM可以在应急状态下被触发,以避免与ISS 碰撞。这个功能在每次交会飞行中作为保护ISS 免除安全性危险的最后一个星上资源。
4.3 演示日1[8,15]
“演示日1”(Demo Day 1)的起点与结束点均为“过渡点”(transition point)S-1/2。点S-1/2位于ISS 39km 之后,5km 之下。在这一点,ATV-JV 被指令向ISS 之后3.5km 且相同高度的保持点S2逼近。在点S2,ATV-CC 指令飞行器执行“逃离”机动。逃离机动将ATV-JV 转移至ISS的前向,并经一系列轨道机动,使飞行器返回到起点S-1/2,结束“演示日1”(见图20、图21)。
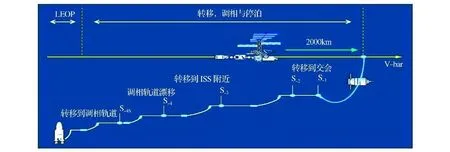
图19 ATV-JV 转移、调相与停泊序列[15]Fig.19 ATV-JV transfer,phasing and parking sequence
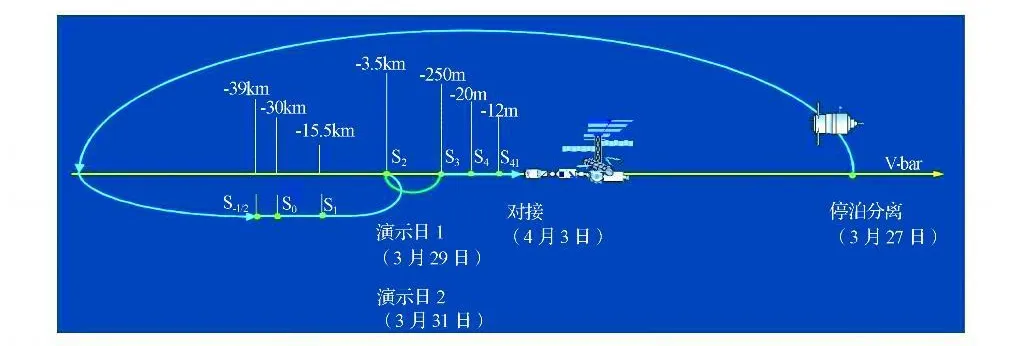
图20 ATV-JV 离开停泊点至演示日[15]Fig.20 AT V-JV from parking to demonstration days
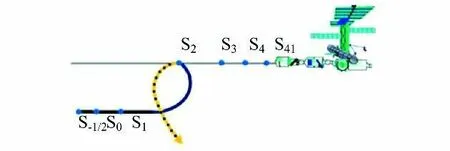
图21 ATV-JV 演示日1[15]Fig.21 ATV-JV Demo Day 1
演示日1 在ATV-CC 发出“GO”指令后,以预寻的段开始,最早在S-1/2,最迟在S0。在到达S-1/2不到几分钟,为了RGPS 滤波器初始化,ATV-CC 向星上发送预测估计的ATV 对ISS的相对位置和速度。在这个阶段期间,寻的段助推序列与量值由ATV 自主计算,这是基于ATV 上RGPS 并应用闭环控制算法,该算法应用C-W 方程。ATV-CC 在ATV 上助推计算和相对于ISS的轨迹安全性确认后,对寻的段给出“GO”指令。寻的段助推将ATV置于ISS 之后3 500m ,之上100m 的S2 位置保持点。
在S2位置保持点期间,ATV 处于“偏航导引”姿态模式,并以类似寻的段逼近的策略作出接近机动计算。同时俄罗斯微波雷达基底系统Kurs 被激活,为ISS 乘员提供在S3的相对距离,以证实ATV不会在接近段进入警戒球(KOS)。然而,在“演示日1”期间,ATV 没有从S2点继续向ISS 逼近,相反,ATV-CC 触发了一个“逃离”(Escape)遥控指令。“逃离”为4m/s 的逆向机动,这是第1次演示“逃离”机动,称之为“逃离1”(Escape 1),由ATV上标称GNC 执行。在S2点进行的这一系列运作是为了在进入ISS“逼近椭球”(AE)之前,脱线完成对远距交会GNC(基于RGPS)、FCM ,以及“逃离”能力的验证演示。
“演示日1”的主要目的是:1)显示ATV可应用相对G PS 执行与ISS的相对导航,成功安全地将ATV 机动至V-bar 保持点S2(S2位于ISS 后3.5km,在相同轨道高度);2)演示ATV 执行“逃离”(Escape)机动的能力。逃离机动可由ATV 自主触发,或由ATV-CC,或由ISS 乘员触发,它由ATV 主计算机执行,可提供4m/s 的逆向机动速度。与CAM 一样,“逃离”是ATV 保证ISS 安全性的第2 种方法,但在逃离情况下,ATV 不进入“安全模式”。
“演示日1”期间的验证目的包括:1)RGPS 相对导航:应用的ATV 标称RGPS 相对导航(在自由漂移和轨道机动期间)以足够的精度为寻的段与接近段制导应用,安全控制远距交会轨迹。2)FCM导航:FCM导航基于ATV 与ISS PV t 解之差,并经加速度计数据滤波,足够精确地防止ATV 飞入一个不安全的轨道即使在远距交会段任何一点交会中止或“逃离”被需要的情况下。3)寻的助推:寻的助推在星上计算并被执行,使ATV到达目标S2点,且ATV 实际轨迹对ISS是安全的:这是在ATVCC“飞行动力学”实时监测下验证的。4)逃离机动:逃离机动在预料偏差内执行,将ATV 带至相对ISS安全的轨道。5)后逃离1:在逆向逃离机动后,ATV在空间站下面和前方漂移。“后逃离”机动序列将ATV 带到围绕空间站的轨迹上,以要求的精度再次到达S-1/2航向点,准备执行新的交会序列。
4.4 演示日2[8,15]
ATV-JV“演示日2”(Demo Day 2)交会运作的最初一段与“演示日1”期间飞过的的阶段相同:预寻的、寻的,以及S2位置保持点。然而这一次,在S2保持点,ATV 接受来自ATV-CC 的“GO”指令,经4次机动,到达位于ISS 之后250m 的S3位置保持点,因此进入ISS“逼近椭球”(AE)。在S3位置保持点期间,ATV 执行了从“偏航导引”姿态模式到“地球指向”姿态模式的转动,并对“视频仪”(VDM)与“远距测向仪”(TGM)导航进行检验,实现由GPS导航向VDM/TGM导航的转换。从S3开始,ATV执行沿LVLH 系x 方向的受迫平移,进入ISS“警戒球”(KOS),直至位置保持点S4。这个阶段被称为“最终逼近1”。这一阶段GNC 基于“视频仪”(VDM)导航,平移运动遵从预定的速度变化率,并且由应用“远距测向仪”(TGM)的“飞行控制监测”(FCM)进行实时轨道监测。在这个逼近过程中,进行了“后撤”,“保持”和“恢复”验证演示:1)“后撤”机动是一个逆向机动。在“演示日2”期间这个机动在距ISS 140m 处被触发。2)“保持”机动旨在维持ATV 在离ISS 固定的距离。在“演示日2”期间,“保持”机动在“后撤”机动执行后触发,使飞行器停止在相对距离为150m 的保持点。3)“恢复”机动使处于“保持”状态的ATV 恢复逼近序列。在“演示日2”期间,“恢复”机动在“保持”机动约3min 后触发,使飞行器进驻离ISS 20m 的保持点S4。
在位置保持点S4卷间,ATV 从“地球指向”姿态模式转换为ISS 相对姿态模式,后者基于视频仪相对姿态导航。最终逼近制导在于沿ISS 对接港纵轴的受迫平移,ATV 对接杆头保持对准ISS 对接港,并将ISS 动力学引发的周期性相对运动滤除掉。因此相对姿态上的变动意味着ATV 质心位置相对于对接杆头部的修正。ATV-CC 给出向最终逼近2的“GO”指令,将ATV 置于离空间站12m 的S41位置保持点。ATV 在“演示日2”不对接。相反,ISS乘员指令ATV“后撤”至S4,并在S4触发“逃离”指令,这是第2次“逃离”机动,称之为“逃离2”。类似“演示日1”的“逃离”机动,在第2次“逃离”机动后,ATV 转移ISS的前方,经一系列轨道机动后,ATV又回到起点S-1/2,再一次准备新的交会序列(见图22)。

图22 ATV-JV 演示日2[15]Fig.22 ATV-JV Demo Day 2
“演示日2”期间的验证目标包括:1)评估交会敏感器VDM 与TGM 提供一致的数据。2)验证ATV 在最终逼近期间执行受迫平移和相对姿态导航的能力(包括ATV-CC 或乘员指令的“后撤”,“保持”与“恢复”的能力。3)显示在近距离内的轨迹性能非常接近或在对接机构要求内。4)证实FCM导航数据是计算正确,在预期偏差范围内。5)检测在近距离执行的“逃离”能维持相对ISS 结构安全的ATV 姿态动力学。
4.5 演示日3[15]
“演示日1”与“演示日2”飞行试验成功后,2008年4月3日,ATV 再次逼近ISS,进行首次对接试验。在到达离ISS 250m 保持点S3后,ATV 计算机应用VDM 与TGM 数据进行最终逼近与对接机动的计算。ATV 逼近ISS的速度为7cm/s。当ATV-JV 离空间站更近时,ATV-CC 飞控人员导引ATV 以预先确定的方式向ISS 逼近。ISS 乘员应用“星辰”号舱中的Simvol 屏监视ATV 逼近过程。如果ATV 越出预先确定的逼近走廊,ISS 乘员将启动CAM。逼近需要得到“莫斯科使命控制中心”(MCC-M)获准,这是因为ATV是与ISS的俄罗斯“星辰”号舱段对接。MCC-M 与“休斯顿使命控制中心”(M CC-H)的全面协调配合是需要的,它们要为整个ISS 负责。对逼近的每一步,ATV 均执行自动操作机动。
4.6 连接阶段[8,15]
2008年4月3日16 ∶45,由图卢兹(Toulouse)法国国家空间中心(CNES)飞控人员运作,在与M CC-M,MCC-H ,以及ISS 乘员共同协作下,ATVJV 联接在ISS 上,成为ISS的一个新舱段。在联接阶段的验证目标为:1)评估推力器再助推的“碎片回避机动”(DAM)能力:ATV 推力器对ISS的再助推能力评估,旨在证实执行DAM 的能力。再助推是使用2个“轨道控制系统”(OCS)推力器的1m/s 的正向机动。验证在于证实DAM 给出期望的ΔV,也在于增加使用ATV 正确执行DAM 的置信度。2)评估ATV 推力器对28个姿态控制的能力:姿态控制测试在于将ISS 绕所有3 轴正向和负向旋转5°。
4.7 分离、降轨与再入[9]
2008年9月5日,按ATV-CC 指令,ATV 挂钩松开,解除对接;在星辰号舱(Zvezda)对接口上的弹簧机构作用下,ATV 以5cm/s 的速度被缓慢地推离ISS,处于自由漂移状态。此时,ATV CAM系统被ATV-CC 恢复运作并重新开始飞行控制监测。
解除对接1min 后,ATV 离ISS 3m 距离,在这一点,标称离开推进开始。离开推进应用较小的姿控推力器,作用5min,使ATV 飞离ISS(并慢速向下),直至相对速度达4m/s,推力器点火由星上计算。
解除对接22min 后,ATV 在ISS 之下5km 高度处通过。ATV 此时处于所谓“偏航导引”(YS)姿态,为ATV 提供相对太阳的最佳方位,以利于太阳电池阵对日定向。因ATV 已处于足够安全的距离,ATV-CC可关断Auto-CAM系统,监测与安全保障单元(MSU),以及ISS 与ATV 之间的邻近链路(Proximity Link)。同时,轨道控制参照系(Orbital Control Frame,OCF)被激活。OCF是星上计算ATV 飞行轨迹的GNC 软件的一部分,飞行轨迹计算应用来自ATV-CC 的上传数据。
在ATV 离开阶段,ATV 避开了俄罗斯“进步”号(Progress)货运飞船(9月10日发射,9月12日与ISS 对接),在经历了多次轨道转移与轨道修正机动后,于2008年9月29日到达降轨/再入接口点。ATV 从这一点开始降轨/再入程序,确保ATV 残留物落向太平洋预定区域。
4.8 小结
ATV-JV是欧洲第一个轨道交会飞行器,也是至今欧洲执行的最复杂的空间使命。在长达6个月的飞行期间,飞行器设备或分系统没有发生任何故障,地面飞行控制站也没有上传必需的软件或插入程序补码。ATV-JV 成功完成了交会飞行验证演示,与ISS 对接,向ISS 输送物资与给养,并为ISS提供推进服务。此外,ATV 以精确的GNC 闭环补偿,实现优于10cm 的对接精度(ATV-JV 实际约为1.5cm)。ATV-JV 以多项交会技术创新,圆满完成了飞行验证演示与服务ISS的双重使命(见图23、图24)。
ATV-JV 实现了下列技术创新:1)首次应用相对GPS 技术,实现自主远距交会;2)首次完全基于光学敏感器,实现高度自主的全自动操作的近距交会(最终逼近)与对接;3)在一次飞行中成功完成交会验证演示与服务空间站的双重使命。

图23 ATV-JV 飞行照片Fig.23 ATV-JV f light photos
5 结束语
ATV 规划是欧洲通向载人航天飞行的重要里程碑。ATV 的主要特点是:1)使命全程全自动操作;2)货运器加压舱具有环控生保系统,ISS 乘员可进入工作;3)对远距交会,首次应用相对GPS 技术,实现自主导航,并应用ATV/ISS GPS PVt 进行飞行控制监测;4)对近距交会(最终逼近),首次应用“视频仪”(VDM)实现自主导航,并应用“远距测向仪”(TGM)进行飞行控制监测;5)“邻近飞行安全性”(PFS)的“避撞机动”(CAM)功能确保飞行器满足2次故障下的安全性要求;6)交会对接飞行验证演示与对ISS 提供服务相结合。ATV 的上述特点直接通往欧洲未来载人飞行的相关技术,为欧洲未来载人飞行使命服务。

图24 ATV-JV 飞行状态示意图Fig.24 ATV-JV f light status pictures
ATV-JV 成功飞行后,第2个ATV(ATV-2)将于2011年2月15日发射,2月26日与ISS 对接,三个半月后与空间站分离、降轨,再入地球大气层。ATV-2 以德国天文学家与数学家约翰尼斯·开普勒(Johannes Kepler,1571-1630年)命名(ATVJK)[18]。现在第3个ATV(ATV-3)也已确定以意大利物理学家与太空飞行先驱爱德华多·阿玛尔迪(Edoardo Amaldi,1908-1989年)命名(ATVEA)[19]。ATV-EA可能于2012年上半年发射。
随着ATV 飞行的成功,欧洲航天局(ESA)正致力于研制欧洲货运系统,即“先进再入飞行器”(ARV),执行非毁坏性再入。ATV 的加压舱将被ARV 的再入舱取代,后者可将货物与有价值的实验设备返回地球。ARV是欧洲通向载人航天飞行的第2 步。ATV 新技术将在ARV 研制中得到应用。ATV 的能力也可在以后用于研制载人航天器(如可能的ARV Crew Version[6]),复杂的空间基地,或自动样品返回使命。毫无疑问,ATV 规划与正在研制的ARV 使命不仅可迎合2011年航天飞机(Space Shuttle)退役后的需求,而且将有力增强欧洲在载人航天飞行与太空探测中的地位。欧洲正在飞行试验与空间服务(应用)相结合的道路上稳步前进,取得令人瞩目的成就。
附录:缩略语(Nomenclature)
AADE Absolute Attitude and Drift Estimation(绝对姿态漂移估计)
AC Approach Corridor(逼近走廊)
ACCAAccelerometers Assembly(加速度计组件)
AE Approach Ellipsoid(逼近椭球)
AGPS Absolute GPS(绝对GPS)
ARV Advanced Re-entry Vehicle(先进再入飞行器)
ATV Automated Transfer Vehicle(自动转移飞行器)
ATV-CC ATV Control Center(ATV 控制中心)
CAM Collision Avoidance M aneuver(避撞机动)
DPS Data Processing System(数据处理系统)
DPU Data Processing Unit(数据处理单元)
DTG Dry Tuned Gyro(干式调谐陀螺仪)
DUADocking U nit Active (ATV docking port)(对接单元主动部分(ATV 对接口))
DUP Docking U nit Passive (ISS docking port)(对接单元被动部分(ISS 对接口))
Docking U nit Interface Plane(对接单元界面平面)
ESAEuropean Space Agency(欧洲航天局)
FAS Flight Application Softw are(飞行应用软件)
FCM Flight Control M onitoring(飞行控制监测)
FDI Failure Detection and Isolation(故障探测与隔离)
FDIR Failure Detection Isolation and Recovery(故障探测、隔离与修复)
FRMS Reference Frame Services(参照系服务)
FT Failure Tolerant(失效容限)
FTC Fault Tolerant Computer(故障容限计算机)
GMS GNC Measurement System(GNC 测量系统)
GNC Guidance N avigation and Control(制导、导航与控制)
GPS Global Positioning System(全球定位系统);GPS 卫星;GPS 接收机
GYRAGyrometers Assembly(陀螺仪组件)
IPC ISS Parameters Conversion(ISS 参数转换)
ISS International Space Station(“国际空间站”)
KOS Keep-Out Sphere(警戒球)
LEOP Launch and Early O rbit Phase(发射与初轨阶段)
LOF Local Orbit Frame(当地轨道系)
LOS Line Of Sight(视线)
LVLH Local Vertical Local Horizonal(当地垂直当地水平)
M CC-H Mission Control Centre-Houston(休斯顿使命控制中心)
M CC-M Mission Control Centre-M oscow(莫斯科使命控制中心)
MSU M onitoring and Safing Unit(监测与安全保障单元)
MVM Mission and Vehicle Management(使命与飞行器管理)
FLC Flight Control(飞行控制)
N TVC Navigation Transition Validity Check(导航转换有效性检验)
OMP Onboard Mission Plan(星上使命计划)
PDE Propulsion Drive Electronics(推进驱动电子设备)
PFS Proximity Flight Safety(邻近飞行安全性)
PRO Propulsion System(推进系统)
PV t Position,Velocity and Time(位置,速度和时间)
RGPS Relative GPS(相对GPS)
RM CARendezvous M onitoring and Collision Avoidance(交会监测与避撞)
RVDM Relative Navigation with Videometer(视频仪相对导航)
SGS Solar Generation System(太阳发电系统)
SSU Solar Sensor U nit(太阳敏感器单元)
ST R Star Tracker(恒星跟踪器)
TDRSST racking and Data Relay Satellites System(跟踪与数据中继卫星系统)
TGM Telegoniometer(远距测向仪)
TMF T hrusters M anagement Function(推力器管理功能)
TM TC Telemetry and Telecommand(遥测与遥控)
VCC Vehicle Command and Control(飞行器指令与控制)
VCP Vehicle Control Procedure(飞行器控制流程)
VDMVideometer(视频仪)
YS Yaw Steering(偏航导引)
References)
[1]Fehse W.Automated Rendezvous and Docking of Spacecraft[M].Cambridge University Press,2003
[2]朱仁璋.航天器交会对接技术[M].北京:国防工业出版社,2007
[3]EADS Astrium.EADS Space transportation,automated transfer vehicle mission and system breakdow n description[R/OL].[2003-12-02].http://www.ieec.fcr.es/english/formacio/cva/apunts/Ariane/ATV%20Mission%20description.doc
[4]Baize L,Novelli A.ATV“Jules Verne” control centre,from challenges to success[R].AIAA-2010-2124,2010
[5]Clerk S.European data relay satellite system to be decided in 2010[N/OL].[2010-01-22].http://www.spaceflightnow.com/new s/n1001/22edrs/
[6]Bourdonnaye O,Kinnersley M.The Automated Transfer Vehicle-AValuable Asset for ISS Logistics[R].AIAA-2010-8620,2010
[7]Cavrois B,Reynaud S,Personne G,et al.ATV GNC and Safety functions synthesis:overalls design,main performances and operations[R].AIAA2008-7481,2008
[8]Pasquale E,Bonner M,Caluw aets D,et al.In-flight demonstration of safety critical operations of ATV Jules Verne GNC[R].AIAA-2008-7504,2008
[9]ESA.“ Jules Verne” Automated Transfer Vehicle(ATV)Re-entry Information Kit[R/OL].[2010-08-09].http://esamultimedia.esa.int/docs/ATV/infokit/english/Complete_Infokit_ATVreentry.pdf
[10]ESA.ATV-1 Jules Verne factsheet 2008[R/OL].[2010-08-09].http://esamultimedia.esa.int/docs/ATV/FS003_12_ATV_updated_launch_2008.pdf
[11]EADS Astrium.ATV Jules Verne Launch Kit[R/OL].[2010-08-09].www.boomslanger.com/images/julesverne.pdf
[12]Pinard D,Reynaud S,Delpy P,et al.Accurate and autonomous navigation for the ATV[J].Aerospace Science and Technology,2007(11):490-498
[13]Ganet M,Quinquis I,Bourdon J,et al.ATV GNC during rendezvous with ISS[J/OL].EADS Launch Vehicles.[2010-08-21].http://naca.cent ral.cranfield.ac.uk/dcsss/2002/D03a_ganet.pdf
[14]Bourdan J,Cavrois B.Synthese architecture GNC/bord[R/OL].http://cct.ces.fr/cct22/infos/documents/Jour3/1%20CC T_GNC_BCavrois_red.ppt
[15]Baize L,Vanhove M,Flagel P,et al.The ATV“ Jules Verne” supplies the ISS[R].AIAA-2008-3537,2008
[16]Patrizi A,Marradi L,Scaciga L,et al.ATV GPSAoverview[R/OL].[2010-07-22].www.enc-gnss09.it/proceedingsPDF/C3/7_C3.pdf
[17]Nicholas Camussy.The ATV programme “ Jules Verne”[R/OL].[2009-02-16].h ttp://hamburg.dgir.de
[18]ESA.International partners update launch manifest[N/OL].[2010-10-01].http://www.esa.int/SPECIALS/ATV/SEM R88QOHEG_0.html
[19]ESA.Third ATV named after Edoardo Amaldi[N/OL].[2010-03-16].http://www.esa.int/SPECIALS/ATV/SEMMXBCKP6G_0.html
