线性霍尔元件在非接触位置测量中的应用
2011-11-20张艳艳,孟凡兵,于忠得
张 艳 艳, 孟 凡 兵, 于 忠 得
(大连工业大学 信息科学与工程学院,辽宁 大连 116034)
0 引 言
传统的基于光学原理的位置检测在冶金炼焦工业场合,难免有焦状物质附着在测量元件表面,影响正常使用,无法解决这些场合的位置检测问题[1]。基于磁场检测的方法对此不敏感,可以用于这些场合的位置检测。霍尔元件是基于霍尔效应原理将被测量的信号(如电流、磁场、位移等)转换成电动势输出的一种传感器,由于具有结构简单、无接触寿命长等特点,霍尔元件被广泛用于测量技术领域[2]。本文研究了一种利用线性霍尔元件进行基于磁场的位置检测方法。由于霍尔元件对环境温度、周围杂散磁场变化敏感,只有有效地解决霍尔元件的这些问题,才能将霍尔元件应用于这些场合实现稳定可靠的位置测量。
1 霍尔元件在非接触位置测量中的应用
1.1 测量方法
位置测量可以认为是移动物体相对于静止参考点的直线位置的测量。本文采用的测量方法如图1所示,将一个由永久磁铁构成的磁头放置在静止参考点上,在静止参考点附近形成一个由永久磁铁产生的磁场。装有线性霍尔元件的霍尔装置沿直线轨道运行,直线轨道与过静止参考点的直线平行,平行距离恒定在90mm。当霍尔装置在轨道上从图1中的位置1向位置3移动时,靠近磁头磁场加强,远离磁头磁场减弱。安装在霍尔装置上的线性霍尔元件,根据所处磁场的强弱输出不同大小的霍尔电势,由此确定运动物体与参考点之间的位置。
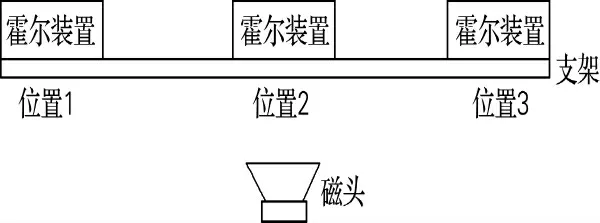
图1 测量方法示意图Fig.1 Schematic diagram of measurement method
如图2位置测量示意图所示,霍尔测量装置内部设有对称的霍尔元件,左右各一个,磁头在测量装置运行轨道的水平下方。图2 中(a)、(b)、(c)对应于位置测量时霍尔装置靠近磁头从左向右移动的3个位置。
处在不同位置,受到磁场影响不同,输出的霍尔电势不同。利用这一特性,设计霍尔元件电压输出信号检测电路,通过对输出信号的分析,确定霍尔测量装置的位置。图3所示为霍尔装置的整机电路框图,将霍尔元件1、2输出的电压信号进行放大比较处理,通过差动输入来平衡补偿环境因素等造成的误差,再经过放大器转换为较大的电压信号。通过V/I转换电路,使得霍尔测量装置输出4~20mA 标准电流信号,不同的电流输出值对应着霍尔装置所处的不同位置。将电流信号送入后级设备,通过后级设备对电流信号的处理来达到所要求的控制目的。
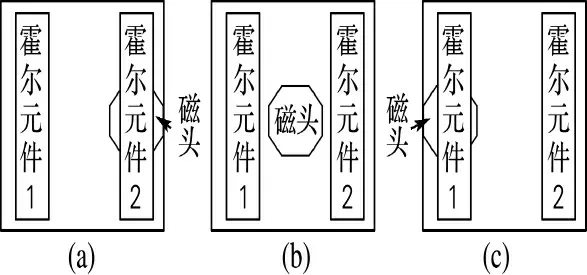
图2 位置测量示意图Fig.2 Schematic diagram of position measurement

图3 整机电路框图Fig.3 Overall unit circuit block diagram
1.2 霍尔元件温度补偿方案
霍尔元件的输出电势不仅与所处的磁场强度有关,而且对工作环境温度变化敏感,在应用中必须采取措施克服环境温度变化的影响[3]。采用恒流源供电是抑制温度变化影响的一种措施,但恒流源供电只能克服电阻率变化带来的影响,并不能完全解决霍尔电势输出随温度变化的稳定性问题。本文研究的霍尔测量装置除了采用恒流供电方式外,还通过为霍尔元件建立一个局部恒温区的方式实现对霍尔元件工作温度的恒定控制,从根本上解决霍尔电势随温度变化发生飘移的问题。
图4是一个温度反馈控制回路,采用两位式控制。U1为一个比较器,温度设定值施加在它的同相端,温度实测值施加在它的反向端,当实测温度低于设定温度时,比较器输出高电平,使Q2、Q3复合管导通,Q3是一个大功率三极管,导通时将向周边散热,提升周边的温度;当实测温度高于设定温度时,比较器输出低电平,使Q2、Q3复合管截止,周边温度将下降,由此实现温度恒定控制。
U3是一个集成温度传感器,温度每升高1 ℃,输出电流增加1nA,输出电流经过U1的反向端时,由于R6≫R5,U3的输出电流在R5上建立了电压,这个电压反映了实测温度的大小。DZ1是一个2.5V 精密基准电压源,作用于U1的同相端,2.5/R5所得的以nA 为单位的电流数值,就是设定的温度值。
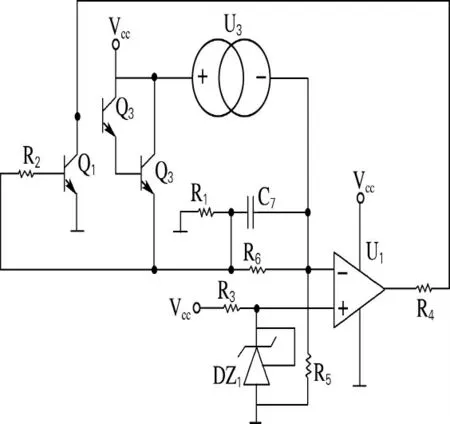
图4 温度反馈控制回路Fig.4 Temperature feedback control loop
将温度反馈控制回路中的U3、Q2和线性霍尔元件用高温黏结剂黏结在导热性能良好的铝型材上,将铝型材置于隔热罩内。采用上述措施后,可将线性霍尔元件的工作温度恒定在1 ℃内,基本解决了温度影响问题。
1.3 差动平衡补偿方案
尽管已经对霍尔元件采用恒温控制方案,但霍尔元件以外的其他电路元件,如运放偏置电阻、恒温电路不能完全抑制的传感器的温度飘移、周边电磁信号影响等问题,仍然可能造成霍尔元件输出电势的不稳定,可以利用差动平衡补偿原理进一步消除。差动平衡补偿原理如图5所示。
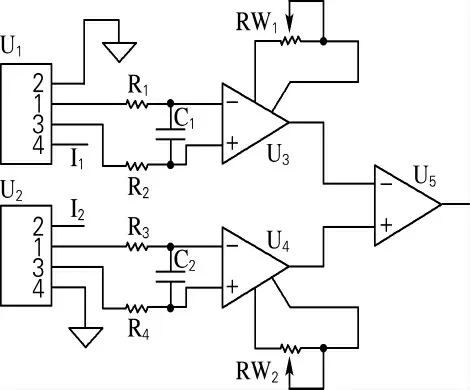
图5 霍尔元件差动平衡补偿电路图Fig.5 Hall element differential balance compensation circuit
U1、U2为两个霍尔元件,分别由I1、I2两路恒流源供电。由于制造工艺的限制,U1与U2的灵敏度是不一致的,为了使进入差动放大器U5的两路信号增益一致,在U1、U2后级分别设计了两个前置放大器,由R1、R2、C1、U3、RW1组成U1的前置放大,放大增益可由RW1调整;由R3、R4、C2、U4、RW2组成U2的前置放大,放大增益可由RW2调整。由于两个前置放大器结构完全一致,且电路参数经过严格筛选,若因放大器参数变化造成输出飘移时,飘移的方向与幅度会基本一致,两路同等的飘移会在U5的差动级中相互抵消。同理,U1灵敏度配合放大器U3的增益,U2灵敏度配合放大器U4的增益,达到在相同磁场作用下,U5的两个差动输入的大小一致,两路信号的总增益相等,做到平衡抵偿杂散磁场影响,并且当霍尔元件及后级放大电路发生温度漂移时,也能进行平衡补偿。这就是差动平衡补偿的基本原理。
1.4 V/I转换方案及后级处理设备方案
经过差动平衡补偿并放大的信号通过V/I转换电路输出4~20mA 的标准电流信号。V/I转换功能由V/I转换芯片AD694完成。将电流信号送入后级设备进行处理,达到要求的控制目标。后级设备的形式可以根据工业现场不同要求来决定,例如采用单片机或PLC。无论采用何种后级设备,都可以根据4~20 mA 电流输出信号达到位置测量的目的。
1.5 实验数据
表1是利用本文介绍的测量方法,将霍尔测量装置在水平位置上从左到右移动时,图3所示各级电路的输出值,其中,当V/I转换电路输出4、12、20mA 时,分别对应图2(a)、(b)、(c)3个位置。表1中V/I转换输出电流反映出霍尔测量装置所处的不同位置,即达到了位置测量的目的。
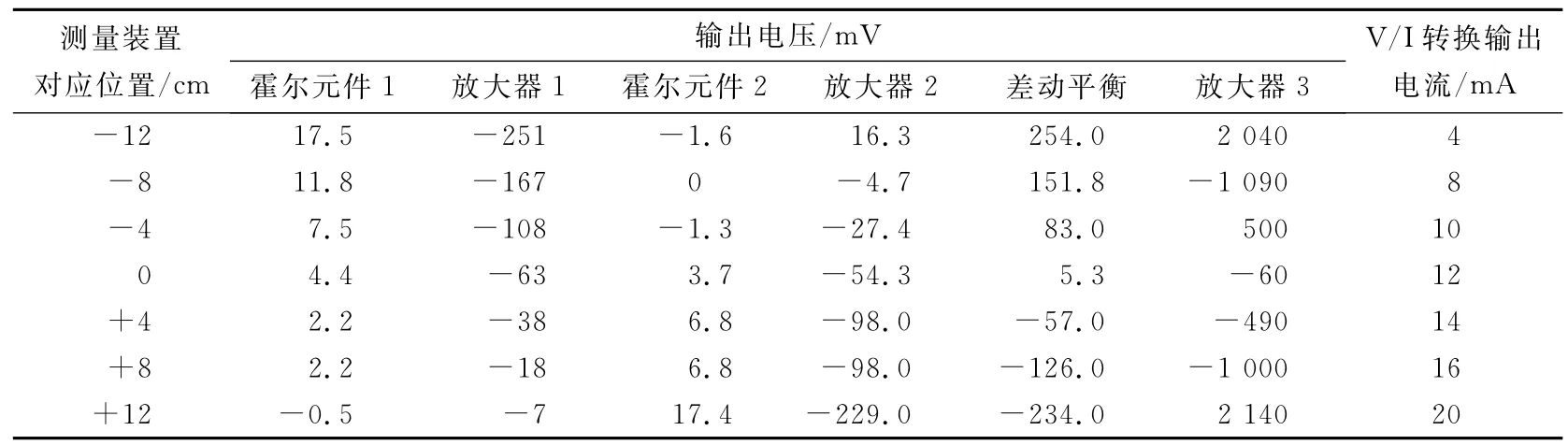
表1 模拟实验数据Tab.1 Simulation of experimental data
2 结束语
本文所介绍的利用霍尔元件进行位置测量方案,已经在某炼焦企业的车辆对位控制中得到实际应用。应用结果表明,该方案比较成功地解决了霍尔元件温度漂移问题与受周边杂散磁场变化影响问题。
[1]董积辉,张东来,秦海亮,等.一种直线位移传感器设计[J].仪表技术与传感器,2007(1):3-4.
[2]张涛.霍尔元件多极磁环式速度传感器的设计[J].装备制造,2009(4):169-170.
[3]杜永苹,何小映.浅谈传感器的温度补偿技术[J].电子设计工程,2009,17(6):63-64.
