外科手术机器人系统及其临床应用
2011-11-16戚仕涛刘铁兵
戚仕涛,刘铁兵
南京军区南京总医院 医学工程科,江苏南京 210002
外科手术机器人系统及其临床应用
戚仕涛,刘铁兵
南京军区南京总医院 医学工程科,江苏南京 210002
与传统电视腔镜手术相比,外科机器人辅助手术具有更加精细、微创等优点。本文介绍了手术机器人系统的特点及达芬奇手术机器人组成原理,并对手术机器人系统的临床应用情况和未来发展做了简要探讨。
外科手术机器人;微创外科;腔镜手术
1 概述
20世纪80年代电视腹腔镜系统手术在胆囊切除术的成功开展,正式开创了微创外科时代[1]。微创外科与传统手术相比,具有伤口小且美观,术中出血较少,恢复较快,患者术后疼痛降低,住院天数减少等优点,深受患者的推崇,同时也成为各个医院吸引患者的重要外科项目。微创手术也逐渐成为医院医疗水平的评价标准,因此传统的电视腹腔镜系统作为一项基础的手术设备被各级医院接纳和购买。
随着电视腔镜手术的广泛开展,其局限性也逐渐暴露出来,电视腹腔镜手术对复杂精细的手术显得力不从心。例如胰十二指肠手术,要在电视腔镜下完成众多的体内缝合相当困难,需要施术者具有丰富的开腹手术经验和娴熟的电视腔镜手术技术。因此,迄今为止,全世界完成的电视腔镜胰十二指肠手术并不多,国内仅见少数个案报道[2]。且从目前有限经验来看,腹腔镜胰十二指肠切除术并没有在缩短住院时间和减少费用上显现出优越性,相反这种手术所需要的手术时间和术后并发症却要多于传统手术方法。因此腹腔镜胰十二指肠切除术目前仍处于探索阶段,有待完善[3]。与此类似的还有泌尿外科微创前列腺癌根治术和心脏外科微创心脏搭桥等。
由于人类一些器官的生理、解剖结构的特殊性和传统电视腔镜技术的局限性,外科手术要达到广泛微创化、精细化的目的,必须有一种新的外科平台的出现才能解决。就像工业生产已依靠机器人作业达到了人类无法达成的成就一样,外科手术机器人系统的应运而生,突破了人类在外科手术领域的局限,开创了外科手术又一个新纪元。
机器人辅助外科手术现在已被医生和患者广泛接受,如机器人前列腺癌根治术和肾盂成形术在美国已具备“金标准”的地位,占相关手术总量的平均比例超过1/3,在一些地区甚至达到90%,而且达芬奇外科机器人系统也参与到很多最先进的外科技术中,如“一站式”心脏杂交技术、不开胸不跳冠脉搭桥,以及“Day Surgery”[4]等。
2 手术机器人系统的优点
与传统电视腹腔镜手术系统相比,手术机器人系统具有如下明显的优点:
(1)提供主刀医生高清晰、立体的手术视野,符合人类工程学,让医生拥有和人眼一样的立体式感觉,可以清晰准确地进行组织定位和器械操作;
(2)仿真手腕手术器械可以模拟人的手指的灵活度,同时消除不必要的颤动,所以手术器械完全达到人手的灵活度和准确度,可以进行人手不能触及的狭小空间的精细手术操作;
(3)医生使用含手脚操作装置的医生控制台,操控精密机器手臂及3D摄影内视镜,操作方式完全尊重医生开放手术操作方式,不需要长时间的培训和学习;
(4)一个主刀医生就可以完成一个电视腔镜手术团队的全部工作,减少了主刀医生和其他手术团队成员的配合,更容易实现主刀医生的意图;
(5)主刀医生采取坐姿进行系统操作,舒适的坐势有利于长时间复杂的手术,而且延长了主刀医生的手术生命。
其他优点还包括:减少麻醉需求量、感染风险、失血量或输血必要、创伤和疤痕等。病人从这种新的手术方式也受益良多:切口变小、康复时间缩短、住院天数减少等。对于大多数手术而言,病人康复时间大幅缩短,可快速恢复日常作息。
综合起来,使用手术机器人系统让复杂的微创手术变得如例行手术一般简单,大大扩大微创手术应用范围,满足了外科领域追求卓越的目标,能够达到更加理想的手术效果、更小的创伤和更大的患者适用范围。表1给出了手术机器人系统与传统电视腔镜系统技术性能的对比,可以看出,手术机器人系统在技术方面具有显著的优势。
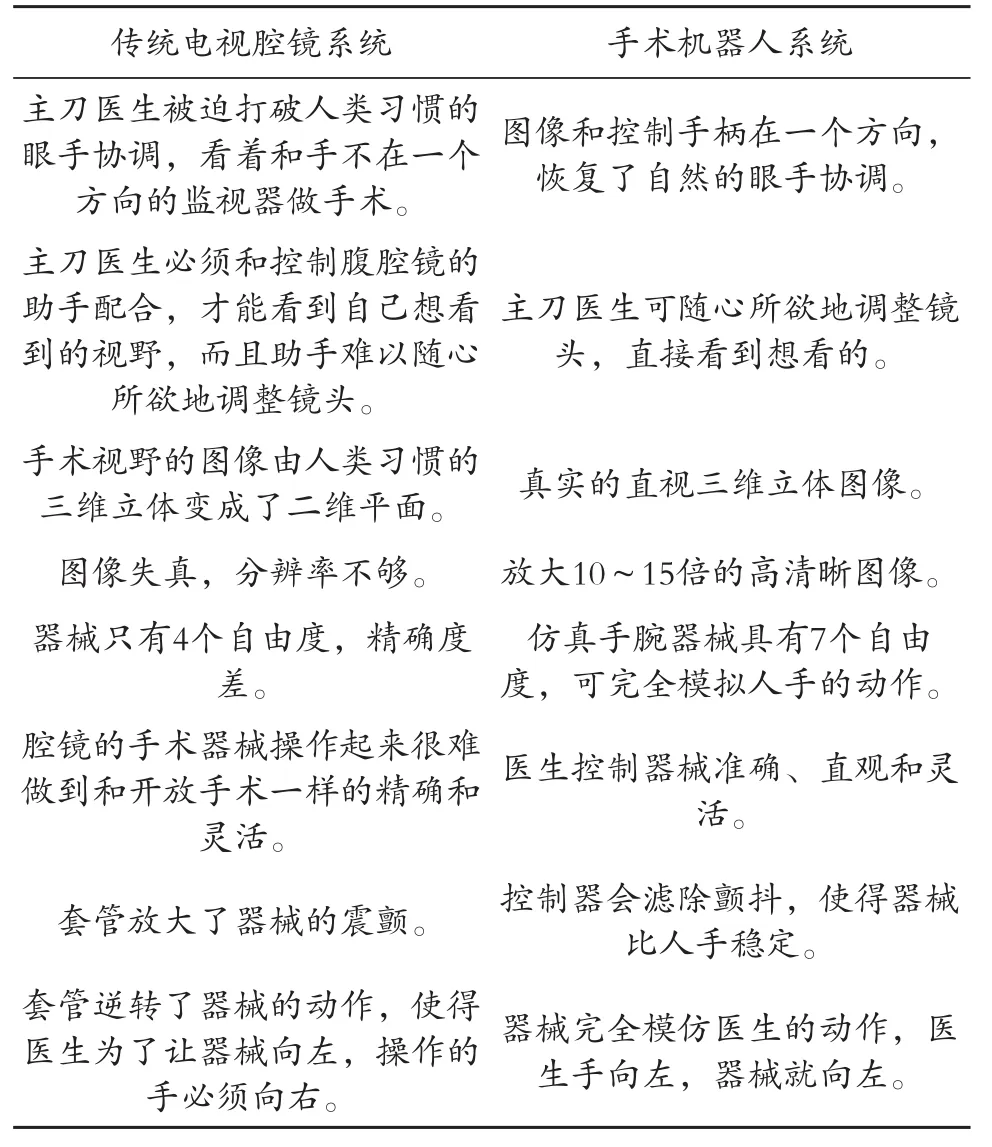
表1 传统电视腔镜手术与手术机器人技术性能对比
3 达芬奇da Vinci® S™手术机器人系统介绍
美国Intuitive Surgical生产的达芬奇手术机器人系统,于1999年取得欧洲CE认证,2000年取得美国FDA认证。达芬奇Da Vinci®S™手术机器人系统是最新一代手术机器人平台,能够通过微创的方法完成复杂的外科手术。实施手术时外科医生不与病人直接接触,通过观察监视器操作控制系统,医生的动作通过计算机传递给手术台边的机械手,机械手的前端安装各种微创手术器械模拟外科医生的技术动作。医生控制台装有三维视觉系统和动作定标系统,医生手臂、手腕和手指的运动通过传感器在电脑中记录下来,并同步翻译给机器手臂。达芬奇手术机器人系统主要分为3 部分:① 外科医生控制台;② 机械臂、摄像臂和手术器械组成的手术台车;③ 三维高清视频影像平台。
3.1 外科医生控制台
外科医生控制台是Da Vinci®S™系统的控制中心,由计算机系统、监视器、控制手柄、脚踏控制板及输出设备组成,见图1。外科医生控制台的操作者坐在消毒区域以外,通过使用控制手柄来控制手术器械和立体腔镜。手术者通过双手动作传动手术台车上仿真机械臂完成各种操作,从而达到了手术者的手在患者体内做手术的效果。同时可通过声控、手控或踏板控制腹腔镜。手术者双脚置于脚踏控制板上配合完成电切、电凝等相关操作。Da Vinci®S™系统让手术者在微创的环境里可以达到开放手术的灵活性。
3.2 手术台车
手术台车(图2)是Da Vinci®S™系统的运转部分,上面安装有工作臂和持镜臂。第一代达芬奇机器人只有2只工作臂,2003年起,新一代达芬奇机器人安装了3只工作臂,增强了应用能力和灵活性。手术车的基本功能是支撑手术器械臂和镜头臂。工作臂装上各种手术器械(仿真机械手如图3),用于完成各种复杂的手术操作,持镜臂用于术中握持腹腔镜物镜,可提供更加稳定的图像,避免了传统腹腔镜手术中助手疲劳导致手部抖动出现视野不稳定的现象。
机械手可以模拟人手各种操作,动作的自由度高达7自由度,包括臂关节上下、前后、自由运动与仿真手腕的左右、旋转、开合、末端关节弯曲共7种动作,可沿垂直轴360°和水平轴270°旋转,且每个关节活动度大于90°。尤其在行深部操作时,机械手动作灵活,体积小巧,与开放手术的人手操作相比具有显著优势。仿真机械手配置了各种类型的手术器械,可满足抓持、钳夹、缝合等各项操作要求;同时机械臂具有计算机辅助位置记忆功能,更换器械后机械臂可迅速回复至更换前位置,具有“即插即用,无缝连接”的特点。
3.3 三维高清视频影像系统
传统腹腔镜技术的一个主要弊端在于二维平面成像,术者在监视器中无法辨别组织前后相对关系,只有充分练习后才可以掌握。达芬奇机器人的三维高清影像系统(图4)则完全解决这一问题,为术者提供了一个真实的手术视野,使打结、缝合等操作变得简单易学。另外,借助数码放大技术,无须移动腹腔镜即可将手术部位放大10~15倍,有利于更加精细的手术操作。

图4 外科机器人视频高清影像系统
4 手术机器人系统在临床中的应用
手术机器人于1997 年3 月在比利时布鲁塞尔圣·皮埃尔(St Pierre)医院完成了第一例腹腔镜手术——胆囊切除术。随后几年里,手术机器人不仅完成了普外科,还有心脏外科、妇科和泌尿外科的手术等。
4.1 心脏外科中的应用
心脏外科是最能体现手术机器人价值的领域,手术机器人克服了常规腔镜手术技术局限,实现了心脏外科的微创化。使用手术机器人系统可完成房间隔缺损修补、冠状动脉搭桥、心包肿物切除等手术[5,6]。目前美国、加拿大以及西欧等国已成功应用手术机器人实行微创二尖瓣置换成形术和冠脉搭桥术。国内解放军总医院于2007 年1 月在国内率先使用该系统,截至2009年底,2年左右时间,已完成各类心脏手术共125 例,均取得了满意的手术效果[7]。
4.2 在泌尿外科中的应用
2003年Monon[8]报道了机器人腹腔镜下前列腺癌根治术、肾盂成形术等。随着机器人腹腔镜前列腺癌根治术技术的成熟,膀胱癌根治术也开始应用机器人进行。Beecken[9]等人报道1例58岁男性进行根治性膀胱切除及体内新膀胱术。Da Vinci机器人最初主要是为微创心脏外科手术研制的,泌尿外科并不是Da Vinci机器人的最初目的,但是泌尿外科迅速进入了机器人手术领域,并因为前列腺癌根治术发展了机器人手术技术。目前,全世界大约400台机器人在临床上应用,大多数主要用于泌尿外科。
4.3 在普通外科中的应用
胆囊切除术是目前运用手术机器人进行普外科手术中数量最多、技术最熟练的手术,它同时也被认为是普外科医生接触手术机器人的一种非常合适的入门“练习”手术。利用机器人进行胆囊切除术已多有报道[10]。
第二炮兵总医院周宁新2009年1月在国内首先应用机器人进行胰十二指肠切除手术,并与同期开腹手术进行了比较,结果表明,机器人手术组的总体并发症发生率低于开腹手术组, 术中出血量及腹壁切口低于开腹手术,术后下床时间更是明显低于开腹手术,出院时间亦明显早于开腹手术[11]。
4.4 在妇科中的应用
手术机器人第一次运用于妇科是在1998 年。Mettler 等人[12]使用AESOP 机器人进行手术, 他们对15 例患者行腹腔镜辅助下阴式子宫全切术, 普通手术时间为85 min , 而有AESOP 辅助下手术时间为70 min。并证实了使用AESOP较人工控制腹腔镜头更有效。Cleveland临床小组在1998年成功地实施了输卵管吻合再通术[13],证实了机器人系统在妇科手术中的可行性及精确性。
4.5 在其他外科手术中的应用
手术机器人在临床中的应用远不止上述所列的几种,理论上讲,手术机器人可以应用于所有的外科手术。由于手术机器人应用于临床的时间还不长,出于医学安全和谨慎的目的,许多手术目前并未采用手术机器人系统,这需要一个过程。
5 讨论与展望
手术机器人系统的发明是医学和工程学结合的又一典型代表,它的出现使外科手术平台又一次发生了质的飞跃,目前被公认为开创了外科手术平台的新纪元。微创外科是外科学未来发展的趋势,手术机器人系统作为微创外科手术平台,从技术角度讲无疑是目前最先进的系统。手术机器人的出现,使以前很多难以开展的手术得以实现,前列腺癌机器人辅助手术已成为前列腺癌根治术的“金标准”[7],所有这些都极大的造福了患者。
当然,目前手术机器人还存在一些缺点和不足,如触觉反馈体系的缺陷,医生只能通过视觉信息反馈弥补触觉反馈的不足;系统技术的复杂性,在使用过程中发生机械故障的几率大于一般的内窥镜手术系统;手术前及手术中的规划和准备耗时较长;成本昂贵等[14-15]。但手术机器人正式应用于临床只不过短短的十余年时间,随着医学和科技的进步,完全有理由相信上述缺点和不足都会逐步的解决。而且,随着智能化技术、纳米技术的发展,未来更先进的人工智能手术机器人、纳米手术机器人也会应用于临床[16]。
[1] 杨来春.腹腔镜手术的临床应用与进展[J].腹部外科,1996,8(3): 142-144.
[2] 卢榜裕,李建军.腹腔镜胰十二指肠切除术围手术期处理[J].中华腔镜外科杂志(电子版),2010,3(1):37-42.
[3] 严加费,牟一平.腹腔镜胰腺手术的现状与进展[J].中华普通外科学文献(电子版),2010,4(3):268-270.
[4] 熊利华.机器人在心脏外科中的应用[J].实用医学杂志,2005, 21(10):1010-1011.
[5] Mehmanesh H,Hence R,Lange R.Totally endoscopic mitral valve repair[J]. Thorac Cardiovase Surg,2002,123(1):96-97.
[6] Kypson AP,Chitwood WR Jr.Robotic mitral valve surgery[J]. Am J Surg,2004,188(4A Suppl):83S-88S.
[7] 王加利,李佳春,高长青,等.机器人辅助心脏手术的体外循环灌注策略[J].南方医科大学学报,2009,29(11):2300-2303.
[8] Menon M,Tewari A,Peabody JO,et al.Vattikuti Institute prostatectomy,a technique of robotic radical prostatectomy for management of localized carcinoma of the prostate: experience of over 1100 cases[J].Urol Clin North Am,2004,31(4):701-717.
[9] Beecken WD,Wolfram M,Engl T,et al.Robot assisted laparoscopic radical cystectomy and intra-abdominal formation of an orthotopic ileal neobladder[J].Eur Urol,2003,44:337-339.
[10] Goh PM,Lomanto D,So JB.Robotic assisted laparoscopic chole- cystectomy[J].Surg Endosc,2002,16(1):216-217.
[11] 周宁新.达芬奇机器人胰十二指肠切除手术要点[J].中华普外科手术学杂志(电子版),2010,4(3):240-245.
[12] Mettler L,Irahim M,Jonat W.One year of experience working with the aid of a robotic assistant (the voice2cont rolled optic holder AESOP) in gynaecological endoscopic surgery[J].Hum Reprod,1998,113:2748-2750.
[13] Goldberg JM,Falcone T.Laparoscopic microsurgical tubal anastomosis with and without robotic assistance[J].Hum Reprod,2003,18:145-147.
[14] 李扬,贺晶.达芬奇手术机器人系统的技术应用与管理建议[J].中国医疗设备,2009,24(1):132-134.
[15] 杨国忠.如何看待高新技术的引进和应用—从卫生部达芬奇手术机器人系统技术评估会引发的联想[J].中国医疗设备,2009,24(1):135.
[16] 金讯波,张栋,夏庆华.机器人辅助技术的未来与展望[J].山东医药,2009,46(39):112-114.
Surgical Robot System and Its Clinical Applications
QI Shi-tao, LIU Tie-bing
Medical Engineering Department, General Hospital of Nanjing Military Region, Nanjing Jiangsu 210002,China
Compared with traditional TV endoscopic surgery, surgical robot system has many advantages, such as more sophistication, minimally invasion and so on. This article described a surgical robot system's architecture, and surgical robot's technical characteristics and clinical applications. The development of surgical robots was also briefly explored.
surgical robot; minimally invasive surgery; endoscopic surgery
TP242
B
10.3969/j.issn.1674-1633.2011.06.019
1674-1633(2011)06-0056-04
2011-04-12
2011-04-18
作者邮箱:bjbull@163.com
