太阳能小车智能控制系统的设计
2011-11-15蒋全胜任玲芝
李 健 蒋全胜 任玲芝
(巢湖学院电子工程与电气自动化学院,安徽 巢湖 238000)
太阳能小车智能控制系统的设计
李 健 蒋全胜 任玲芝
(巢湖学院电子工程与电气自动化学院,安徽 巢湖 238000)
介绍了一种自动避障、追光和太阳能充电的小车设计,其智能控制系统保证:小车能自动向着光源方向行进,途中遇到障碍能自动绕开并继续前进;车身放置了太阳能板充电系统,太阳能板能自动寻光,在小车行进过程中始终对准光源对电池进行充电,即保持充电功率的最大化,同时对当前的充电状态进行了显示.文中给出了系统的软硬件设计.
太阳能智能小车;自动避障;自动追光
1 引言
近年来,光伏产业发展迅速,国内外对太阳能交通工具的研究方兴未艾,与传统的交通工具相比,太阳能汽车具有清洁、环保和可持续发展等优点,可以说是真正“零排放”的交通工具[1].轮式智能小车是目前移动机器人常用的一种形式,被广泛应用到现代制造企业中.智能小车的设计与开发涉及控制、传感技术、电子电气、计算机、机械等多个学科.开展自主循迹智能小车的研究工作,对促进控制、机电、汽车、电子等学科的发展,具有良好推动作用[2].
智能小车是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统[3].文中设计的太阳能智能小车具备如下功能:一是小车自动检测光源,向着光源方向行进,在途中检测障碍物并绕开继续前进;二是车身放置了太阳能板充电系统,在小车行进过程中系统检测光源方向,并始终让太阳能板正对光源,对电池进行充电,即保持充电功率的最大化,同时对当前的充电状态进行显示[4].通过对功能的分析,可以看出,实现这样的小车,需要使用多路和多种传感器检测环境因素,再利用传感器采集的数据制定决策,控制小车的不同行为.
2 系统总体结构
根据功能要求可将系统分成两个子系统:一是小车控制系统,即小车的驱动、追光和避障,另一是寻光充电系统,即太阳能板的寻光和对蓄电池的充电以及充电状态的显示.在主控制芯片的选择上采用STC89C52单片机,考虑到这两个子系统可相互独立且一片单片机的I/O口不够用,故使用两片单片机将之分别加以实现.图1是系统的总体框图.
3 系统硬件设计
系统各模块的硬件设计在实际中大都有多种方案,表1是在实验的基础上进行的各方案的对比,从而确定可行的硬件设计.
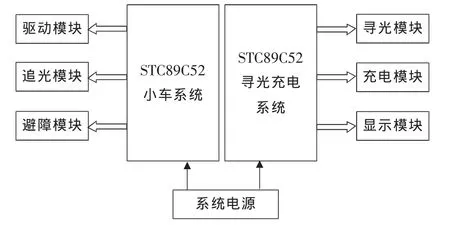
图1 系统总体框图
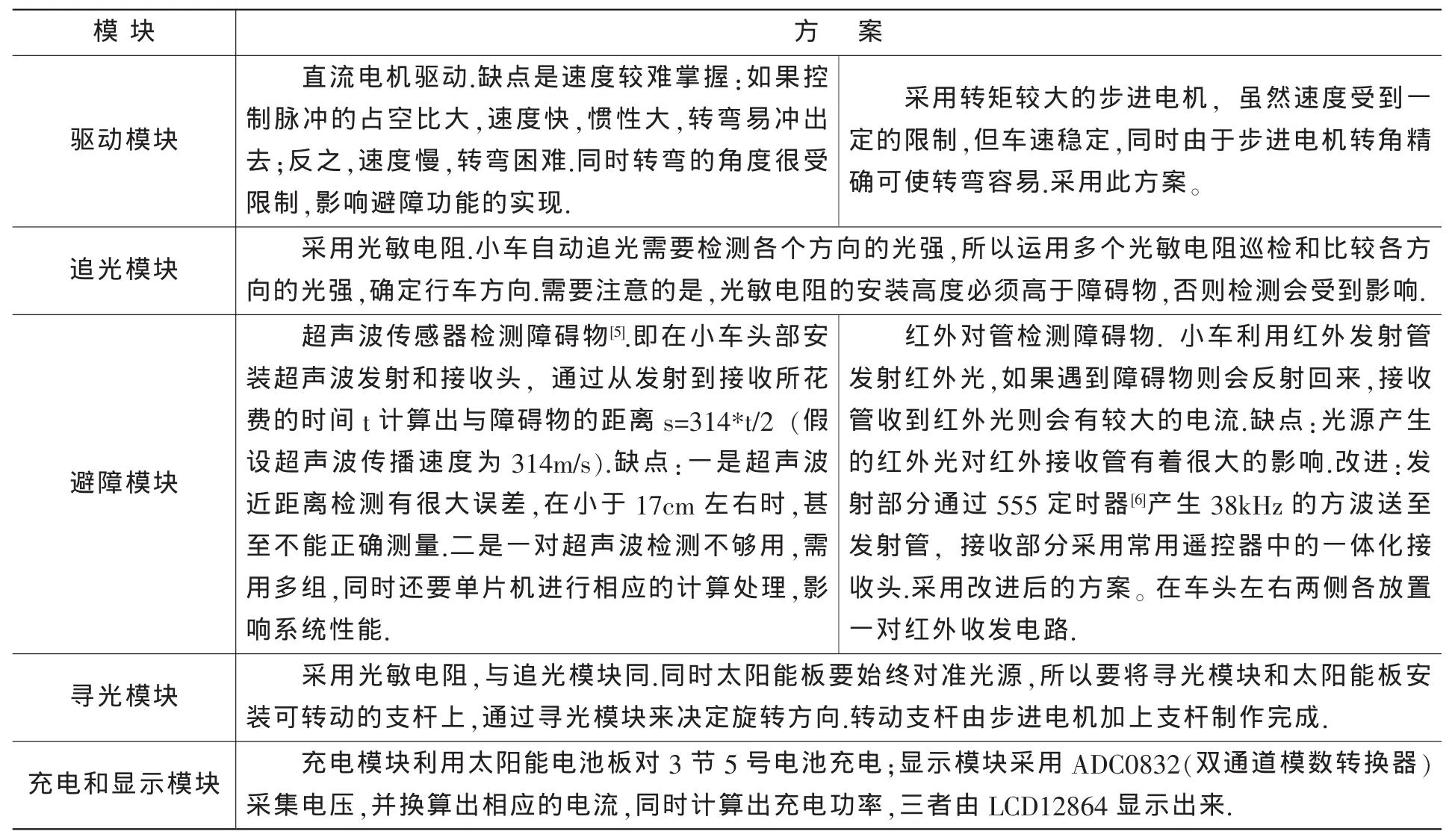
表1 系统各硬件模块方案
3.1 系统电源
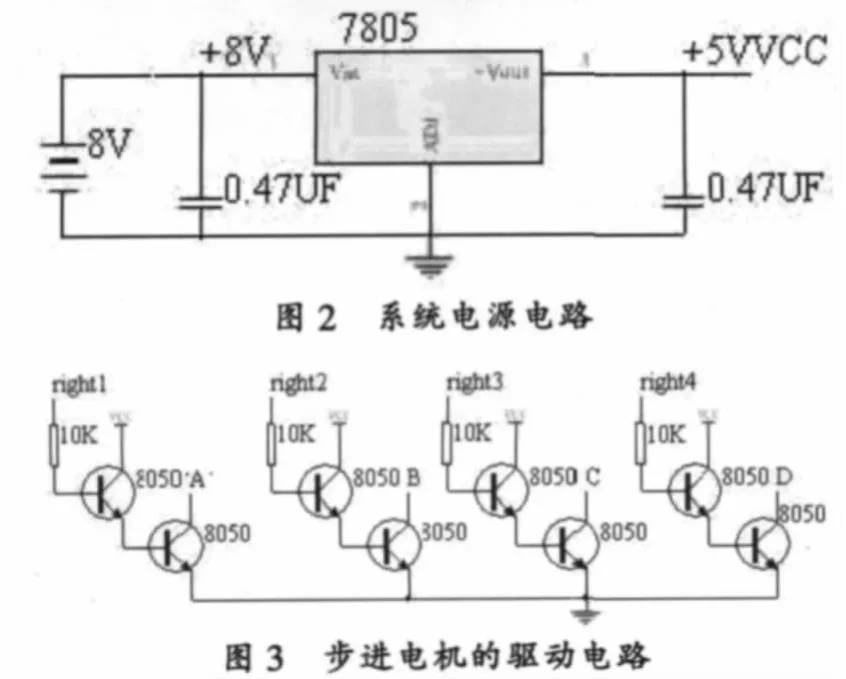
为保证能驱动步进电机正常工作,系统采用两块大容量锂电池串联供电,以获得较大的电压和电流.同时单片机等元器件需要的5V电压是由此电源经过7805稳压得到的,见图2.
3.2 驱动模块
太阳能板和小车车轮的转动都使用了步进电机.步进电机的四相控制线分别由一对三极管构成的达林顿管来驱动.各相的通断由单片机来控制从而保持小车的正确行进.如图3(图上的是右车轮的驱动电路,左车轮和支杆的与此类似).
3.3 光源检测模块
小车追光和太阳能板寻光都采用了光敏电阻[7]来检测光源方向.其原理如图4所示:由运放LM324组成电压比较器,当光敏电阻R15受到光照,运放+端压降减小至小于-端电压时,运放输出低电平;反之光敏电阻未受到光照或光照弱,运放输出高电平.以此判断光源方向.另外系统要求当小车到达离光源一定位置后应停止前进,这只需调节变阻器R13至合适位置即可达到.
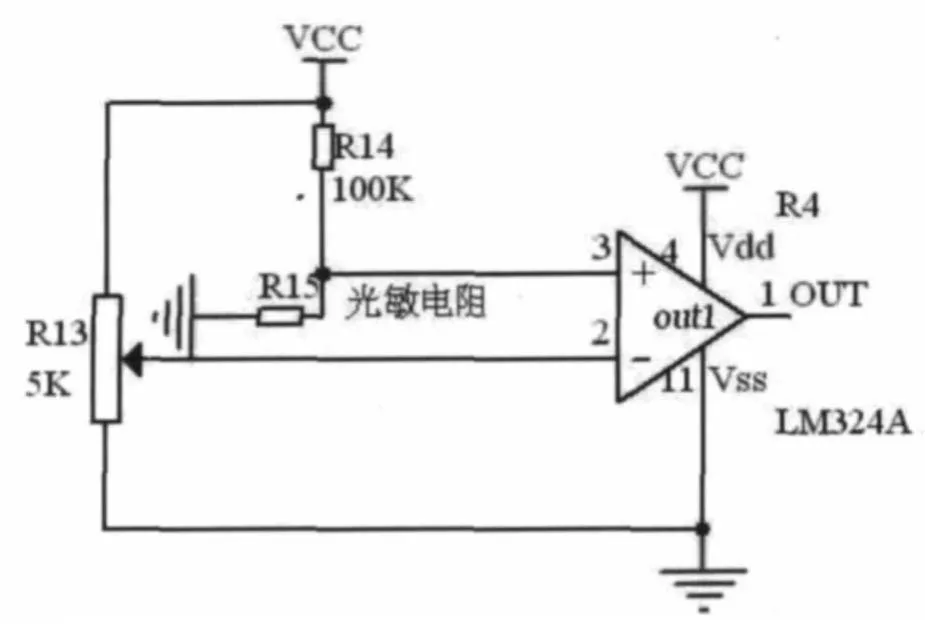
图4 光信号检测电路
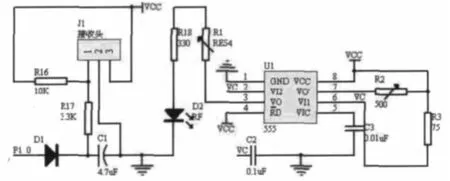
图5 红外避障电路
3.4 避障模块
小车避障利用红外检测实现,如图5所示:发射部分采用555定时器产生38kHz方波信号驱动红外发射管,接收部分采用红外一体化接收头.此方法可有效避免光源中红外线的影响.未接近障碍物时,接收头输出保持高电平;在距离临近时,接收头接收到反射回来的单一频率的红外信号后,输出低电平.但在一定距离范围内,接收信号有所不稳定,所以采用了电容电阻进行消振,除去干扰.同时用二极管的0.7V管压降进一步减弱近光源干扰.此方案电路体积小,单片机需要进行的运算处理少.
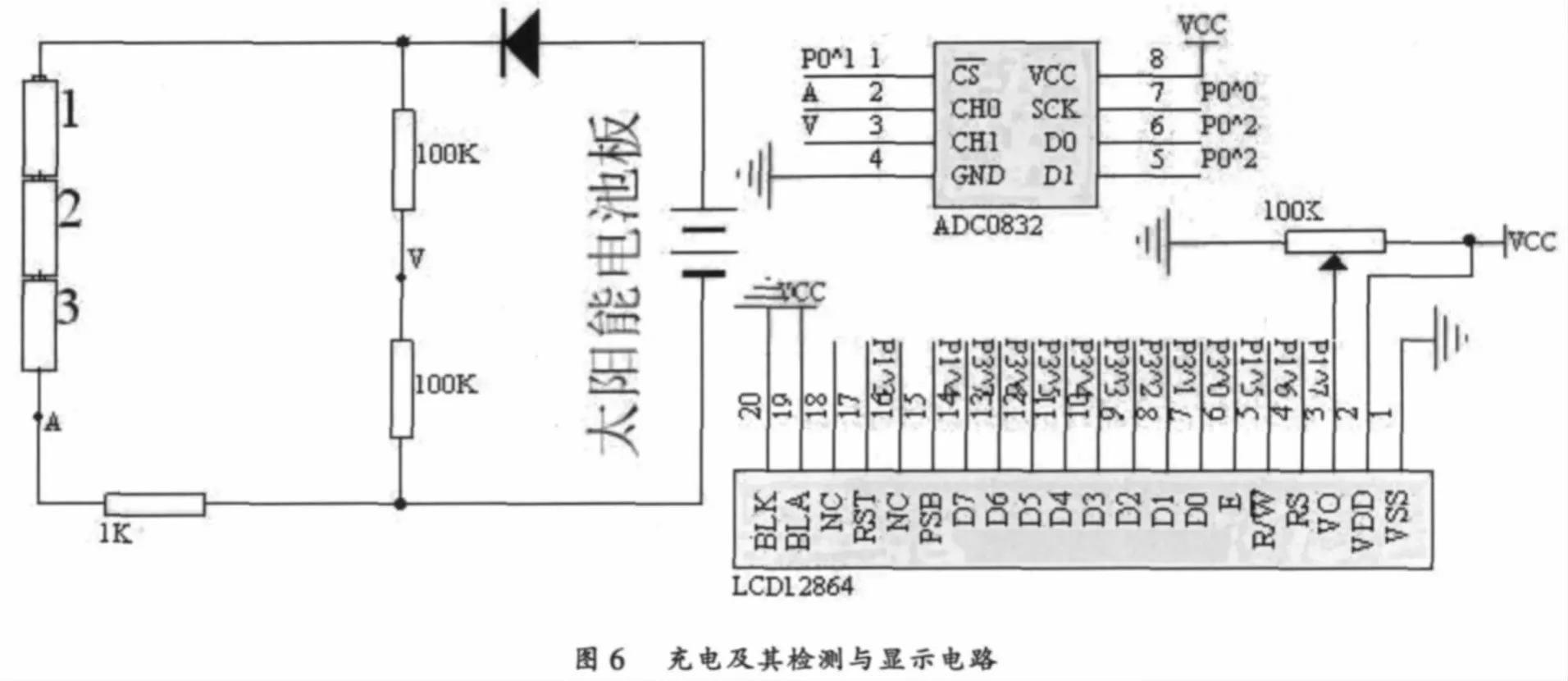
3.5 太阳能充电及其显示模块
利用太阳能板给3节5号电池充电,用ADC0832采集电压电流送给单片机进行一定的处理,并通过LCD12864显示实时的充电状态,原理如图6所示.
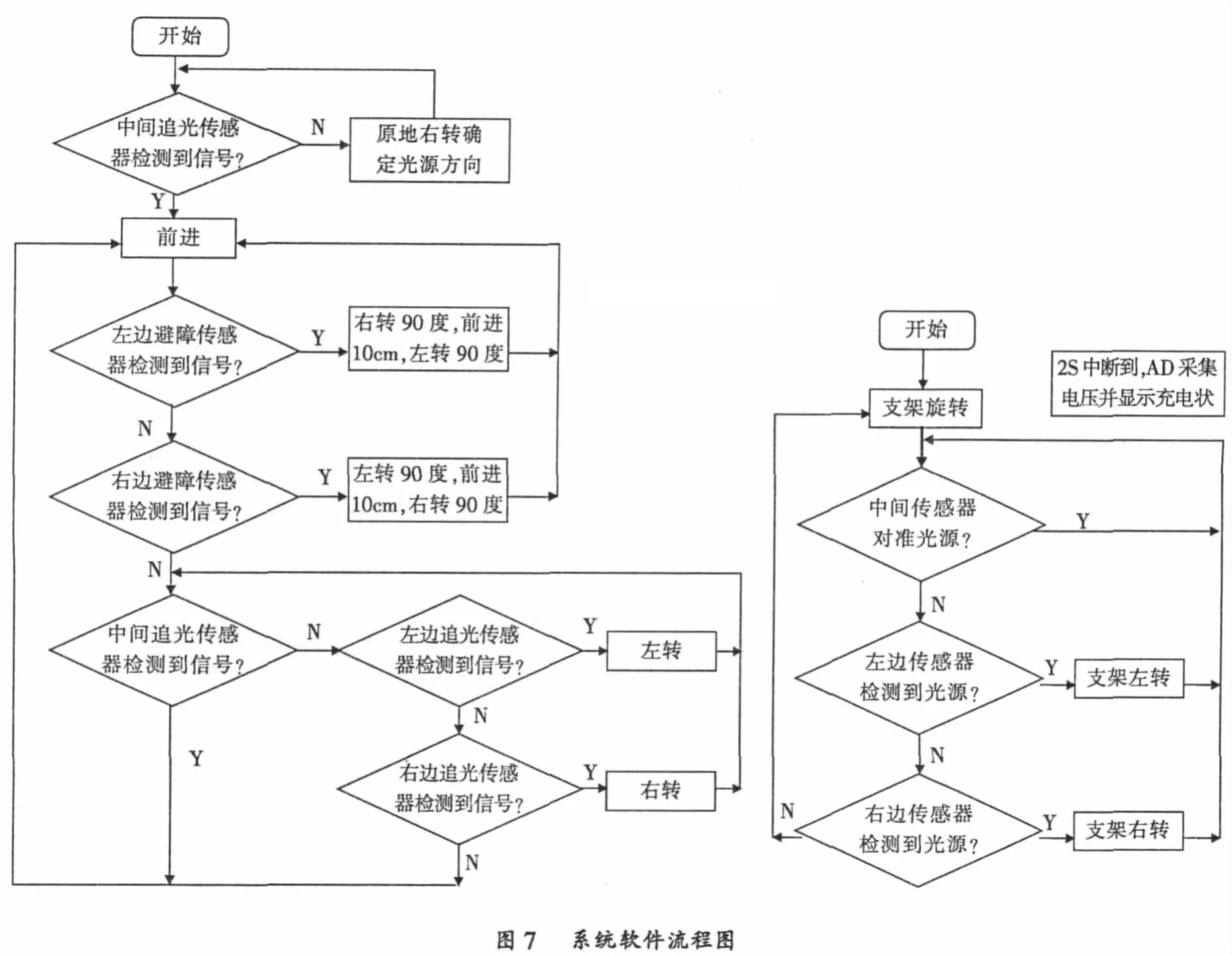
4 系统软件设计
开机后,首先小车在原地自动完成寻光功能,确定光源方向后,开始向着光源行进.行进过程中检测障碍物,如果障碍物临近,小车会绕过障碍物后继续前进.小车以及太阳能板始终在检测光源,保证行进方向的正确和太阳能板正对光源.当小车行至光源较近距离处停下,然后等待5秒转头逆行且保持前述的功能,到达一定位置时停止.图7给出小车追光避障 (小车逆光行驶部分未给出,原理类似)和太阳能板寻光充电的流程框图.
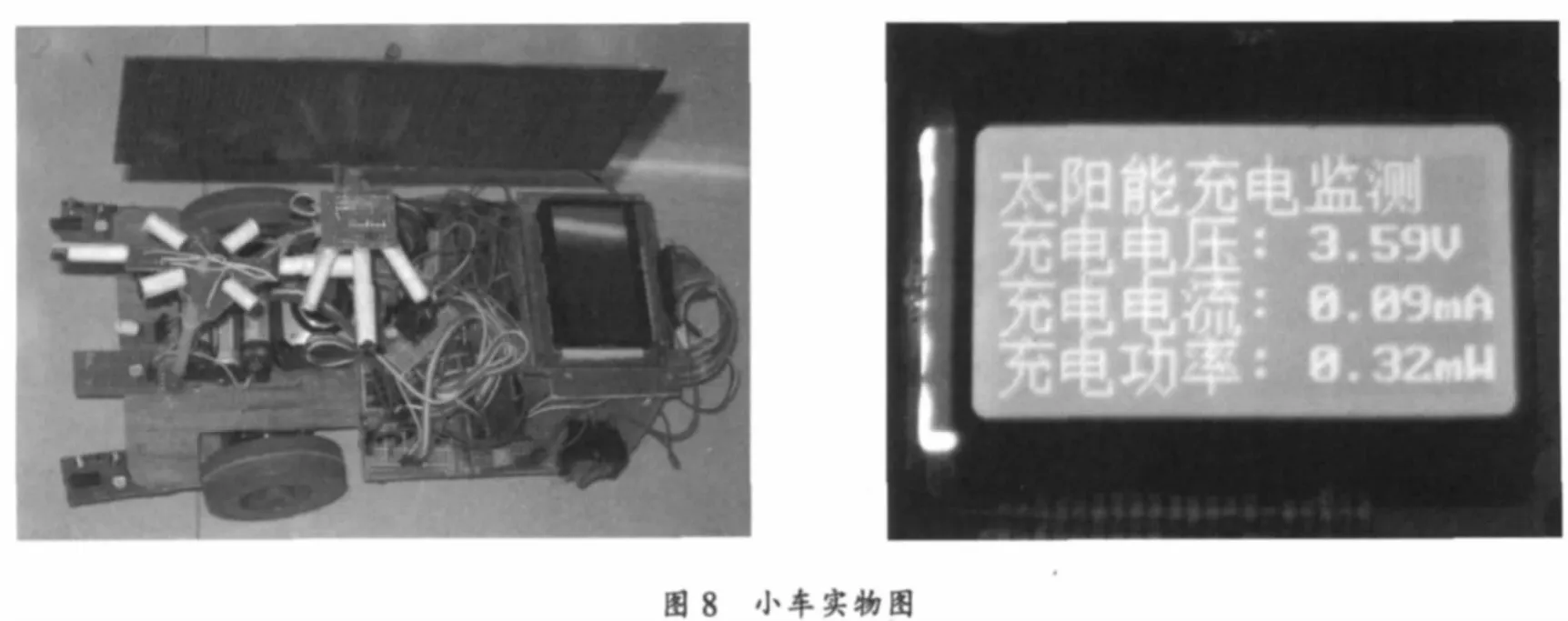
5 结束语
对根据上述软硬件设计制作的小车进行实地测试,结果达到了预期效果,实现了智能小车的功能.它具有硬件电路简单、成本低廉、可靠性高、实时控制性能好等优点.图8为小车实物图(图中光敏电阻用小纸筒套住,避免周围光亮的干扰,增强抗干扰性)和LCD的显示效果图.此小车还有许多可改进和改造之处,比如其中的太阳能电池不足以提供系统工作需要的能源,可增加太阳能电池板,利用收集和转化的电能驱动小车,实现真正意义上的太阳能小车.这些值得进一步研究.
[1]徐开芸,韦树成,汪木兰,丁左武.基于AVR单片机的太阳能智能小车控制系统设计[J].机电产品开发与创新.2010,23(1).
[2]邓志辉,朱江.基于ATmega8515的轮式智能小车控制系统的设计[J].农业科技与装备.2010,(2).
[3]朱孟强,卢博友,雷永锋,周茂雷.基于ARM的智能机器人小车控制系统设计[J].微计算机信息.2008,24(2).
[4]自动追光自动避障电动小车.2010年安徽省电子设计竞赛B题.http://ahedc.eei.edu.cn/uploads/uploads/soft/100903/2010ST_B.doc.
[5]张雷,王志鹏.基于AT89S52单片机的超声波测距避障小车[J].机电信息.2010,(24).
[6]康华光.电子技术基础(数字部分)(第五版)[M].北京:高等教育出版社.2006.
[7]林建平,吴必瑞,叶德柱.基于单片机模拟路灯控制系统的设计[J].河南工程学院学报.2010,22(4).
DESIGN OF A SOLAR INTELLIGENT CAR
LI Jian JIANG Quan-sheng REN Ling-zhi
(Department of Physics and Electronics,Chaohu College,Chaohu Anhui 238000)
The paper introduces the design of a solar intelligent car,its control system can promise:the car runs automatically towards the light.It also can detect and avoid the barrier on its way automatically;A solar panel charging system is located on the car.The solar panel can search light automatically so as to keep facing to the light and the charging power being maximum when the car is running.The charging status is displayed during the process.The paper gives hardware and software designs of the system.
solar intelligent car;automatic avoiding barrier;automatic following light
TP23
A
1672-2868(2011)06-0070-05
2011-9-17
李健(1985-),男,安徽巢湖人。助教,硕士,研究方向:电子专业的教学与科研
责任编辑:宏 彬
