无人机航摄系统大比例尺测图试验分析
2011-11-15王志豪
王志豪,刘 萍
(1.深圳市勘察测绘院有限公司,广东 深圳 518028;2.中国科学院深圳先进技术研究院,广东 深圳 518055)
无人机航摄系统大比例尺测图试验分析
王志豪1,刘 萍2
(1.深圳市勘察测绘院有限公司,广东 深圳 518028;2.中国科学院深圳先进技术研究院,广东 深圳 518055)
以大比例尺(1∶1 000、1∶500)地形图测图为目的,采用中型固定翼无人机平台,搭载非量测型民用数码相机,于和田某区域设立飞行试验场进行航摄试验。在试验场布设大量精确定位的人工地标,对非量测型传感器进行检校标定,对无人机航摄系统获取的航摄影像平面精度及测高精度进行评估,并对系统的改进提出建议。
固定翼无人机;大比例尺测图;相机检校;测高精度
一、引 言
无人飞行器航空摄影系统由于使用成本低、影像分辨率高、机动快速响应等优点,可作为低空遥感数据快速获取的有效途径。而传统无人机并非为航空遥感而设计,因此没有考虑到遥感飞行的特殊性。此外,无人飞行器所搭载的非量测型相机存在较大的光学畸变,不能直接用于测绘生产[1]。因此,低空无人机航摄系统面临着工作效能与测量精度两方面的问题。
本研究自行设计并实现了一套中型固定翼无人机摄影测量系统,为了验证该自主低空航摄系统的测量精度,设计试验于和田某区域进行实际航飞作业,布设一个具有大量地面控制点的飞行试验场,采用无人机搭载非量测型数码相机进行摄影作业,然后对航飞数据通过区域网空中三角测量的自检法来计算全部系统误差对像点位置坐标的综合改正值,从而确定内方位元素和物镜的光学畸变值,实现相机的高精度标定,并将标定结果用于测绘产品生产,以此来对无人机航空摄影测量系统在小区域大比例尺地形图立体测绘中所能达到的精度水平进行评估和验证。
二、航摄系统组成
本检校试验采用的航摄系统组成部分有:固定翼无人机飞行平台、飞行控制系统和非量测型面阵CCD数码相机,以及地面站、远程无线通信装置、地面数据处理系统等辅助设施。
1.无人机飞行平台
由于固定翼无人机具有低成本,可实现低速平稳飞行等优点,本研究采用固定翼无人机平台。平台主要采用重量轻、强度大的玻璃钢和碳纤维复合材料加工而成,机长为2.15 m,翼展为3.1 m,最大起飞重量为20 kg,起飞速度为70 km/h,任务仓尺寸为600 mm×280 mm×200 mm,任务载荷为6 kg,飞行速度为100~110 km/h,飞行高度≤4 km,续航时间为3 h,控制半径为≤20 km。
2.飞行控制系统
飞行控制系统用于飞行控制与任务设备管理,由自驾仪、姿态陀螺、GPS定位装置、无线电遥控系统等组成,可实现飞机姿态、航高、速度、航向的控制及各个参数的传输以便于地面人员实时掌握飞机和遥感设备的飞行情况。机上采用的GPS接收板为普通单频无差分GPS,导航精度约在±5 m以内,控制方式有人工遥控和自主飞行两种。
3.遥感设备
此次试验搭载的遥感设备为135画幅单反相机及广角定焦镜头,镜头标称焦距28 mm;CMOS传感器尺寸:36 mm×24 mm,最大像素:6 048像素×4 032像素;CMOS传感器像点尺寸:5.95 μm。飞行过程中采取飞控系统控制快门定点曝光,将对焦环固定在无穷远处锁定相机的内方位元素,并采用固定光圈以保证统一物镜畸变参数。
三、地面检校场的建立
为保证无人机飞行试验的安全性,该检校场选址于和田某荒漠地区,地理位置为80.2°E,36.97°N,所选检校场总面积约为3 km2,区域内地形高差约90 m。该区域地貌类型比较单一,地表无明显人工建筑及自然植被。为了便于辨识及保证定位精度,制作50个90 cm×90 cm的人工控制点标志,按照300 m间距均匀布设10×4个人工地标作为平高控制点,另设10个人工地标作为检查点。此外,在检校场选取某处地面纹理密集区域测出14个点的坐标位置作为检查点,以便后期验证精度使用。检校场地面点分布如图1所示。

图1 和田检校场布点示意图
所有地面控制点采用RTK实时动态差分法进行测量,所有坐标高程均为WGS-84 ITRF97基准,平面及高程位置精度可保证在±10 cm以内。
四、基于检校场的航摄试验
1.试验数据
本试验设计飞行拍摄模式为定点曝光,无人机航高为460 m,地面分辨率为10 cm,检校场影像航向重叠度为60%,旁向重叠度为30%。如图2所示,该架次影像共有两组,挑选姿态角符合要求且覆盖地面已知点较多的两组影像(A、B两组)参与后期的平差处理。

图2 数据处理中采用的影像图示
2.相机检校与测图精度分析
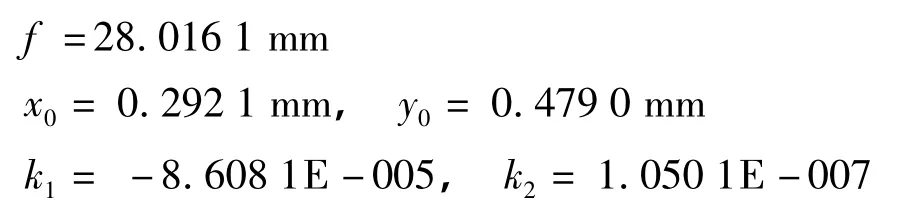
本研究的检校原理是采用区域网空中三角测量运算中的自检法,将可能存在的系统误差,包括相机的实际测量焦距f、像主点偏移值Δx、Δy、物镜各畸变参数等,作为附加参数引入光束法区域网平差。本文所采用附加参数光束法平差的系统畸变数学模型为[2]

式中,(x,y)是像点在像平面坐标系中的坐标;k1、k2是径向畸变参数;p1、p2是偏心(切向)畸变参数;b1是像素的非正方形比例因子;b2是CCD阵列排列的非正交性畸变参数。
航带中选取A组影像进行自检校平差,A区处于航带中间位置,包括第2航带和第3航带各3幅,对应地表的高差约为 35 m,共有 4个控制点、2个检查点。为了便于误差控制,所有后处理过程中均采用UTM 44N投影,通过上述畸变模型对该组影像进行系统误差计算。检校结果如下
为了验证该检校结果的有效性,选择地面检查点密布的B组影像(如图2所示),在未代入检校结果前,先采用镜头标称值进行区域网平差,然后对比检校后的平差结果。平差过程中共采用5个控制点和5个检查点,试验表明,在检校前后检查点的残差发生较大变化,具体数值如表1所示。
根据表1中检查点在检校前后的残差变化,检校后的平面和高程精度均有所改善,其中对高程精度的影响尤为明显,这表明了检校结果的有效性。且所有检查点的平面精度满足1∶1 000地形图航空摄影测量内业规范,但高程在相机标定前后都有所超限。
五、分析总结
1.存在的问题及原因分析
(1)航摄效率问题
无人机的飞行高度决定它所受到的天气影响会远小于航空遥感及卫星传感器,但是本次试验任务中出现了飞行平台的不稳定性造成的影像姿态角超限。因此在后续的工作中应当提高飞行器平台的稳定性。

表1 B组影像检查点的残差值m
(2)非量测型相机的局限
在航摄比例尺≥1∶4 000的情况下,航偏角一般不大于 10°[3],由于非量测型相机的幅面过小(CMOS传感器尺寸:36 mm×24 mm),同样的航偏角对于专业量测型相机仍能满足重叠度的要求,而对于135画幅非量测型相机,则会出现摄影漏洞(重叠度<53%)。因此,有必要采取相机拼接的办法或者选取中画幅相机以提高像片覆盖。
(3)测高精度
影像的高程精度是直接由传感器本身设计的基高比来决定的。理想基高比为1∶1~1∶1.5,本次试验用到的CMOS传感器尺寸:36 mm×24 mm,COMS传感器像点尺寸:5.95 μm,最大像素:6 048像素×4 032像素,焦距28 mm,任务时为窄像对飞行模式,航向重叠度60%。其基高比为

式中,GSD为影像像元的地面分辨率。
因此,要实现无人机大比例尺地形图立体测绘必须要增大基高比,而增大基高比必须通过增大航向成像宽度或缩短焦距来实现。
2.总 结
本试验采取135画幅CCD民用数码相机,以无人飞行器为平台进行相对航高为470 m的航摄作业,通过检校标定成像结果可以满足1∶1 000地形图测图的平面精度要求。试验表明无人机航摄系统可以云下低空飞行,具有机动、灵活等特点,能够获取卫星和有人飞机无法得到的高分辨率影像数据。针对小区域大比例尺的遥感应用,可以作为传统航空、航天遥感平台的重要补充。
然而由于本研究试验条件的局限,不可避免地产生了基高比小、高程精度低的问题。在今后的试验及应用中可针对不同的航摄目标采取相应措施:如采取宽像对飞行模式、选取短焦镜头、增大相机CCD靶面等办法来增大立体相对像幅覆盖。
[1] SU J B.Camera Calibration Based on Receptive Fields[J].Pattern Recognition,2007,40(10): 2837-2845.
[2] 王之卓.摄影测量原理[M].北京:测绘出版社,1979.
[3] 中国国家标准化管理委员会.GB/T 7931—2008 1∶500 1∶1 000 1∶2 000地形图航空摄影测量外业规范[S].北京:中国标准出版社,2008.
[4] 吴云东,张强.立体测绘型双翼民用无人机航空摄影系统的试验与应用[J].测绘科学技术学报,2009,26(3):161-169.
[5] 中国国家标准化管理委员会.GB/T 7930—2008 1∶500 1∶1 000 1∶2 000地形图航空摄影测量内业规范[S].北京:中国标准出版社出版,2008.
[6] 中国国家标准化管理委员会.GB/T 6962—2005 1∶500 1∶1 000 1∶2 000地形图航空摄影规范[S].北京:中国标准出版社,2005.
[7] PACEY R E,WALKER A S,SCHEIDT M.Calibration ofAnalog and Digital Airborne Sensors at LH Systems[C]∥Proceedings of the 1999 ASPRS Annual Conference.Portland:[s.n.],1999:950-956.
[8] SID-AHMED M A,BORAIE M T.Dual Camera Calibration for 3D Machine Vision Metrology[J].IEEE Trans.Instrum.Meas.,1990,39(3):512-516.
[9] JUN J,KIM C.Robust Camera Calibration Using Neural Network[C]∥Proceedings of IEEE Region 10 Conference.Cheju Island:[s.n.],1999:694-697.
[10] FREED M,HARRIS R,WHALLEY M.Human-interaction Challenges in UAV-based Autonomous Surveillance[C]∥Proceedings of the 2004 Spring Symposium on Interactions between Humans and Autonomous SystemsoverExtended Operations.[S.l.]:AAAI Press,2004.
Analysis of Large-scale Mapping Experiment Using UAV Aerophotographic System
WANG Zhihao,LIU Ping
0494-0911(2011)07-0018-03
P23
B
2011-01-04
王志豪(1978—),男,河南新乡人,工程师,研究方向为工程测量。