地面激光扫描仪鉴别率检定方法的研究
2011-11-14王守国
王守国
(天津海事局海测大队,天津300220)
地面激光扫描仪鉴别率检定方法的研究
王守国
(天津海事局海测大队,天津300220)
首先区分鉴别率与分辨率的相互关系,在此基础上研究地面激光扫描仪鉴别率的检定设备、检定方法。研究结果可为我国地面激光扫描仪检定规程的制定提供参考。
地面激光扫描仪;鉴别率;鉴别率检定板;检定方法
一、引 言
三维激光扫描技术是一种采用非接触、主动测量方式快速获取被测物体表面海量采样点三维坐标的高新技术,国内外许多专家都认为三维激光扫描技术是继GPS技术之后测绘仪器领域的又一个里程碑式的技术进步。自1997年美国Cyra技术公司生产世界上第一台地面激光扫描仪(terrestrial laser scanner,TLS)以来,现已有多个生产厂家生产出测程及精度各异的多种仪器。TLS也早已在考古、古建筑修复、建筑施工、计量检测、模型仿真、机械设计、工业检测、交通事故现场重建等行业得到了广泛的应用,目前也已经开始应用到工程测量、变形测量等传统测绘领域。这项新技术在测绘行业的应用将进一步拓宽测绘技术的服务领域。
作为一种新型测量设备,人们自然会关注其测量精度及测量成果的可靠性,以便更加合理有效地使用TLS。为此,国外诸多研究机构从2000年就开始系统地研究TLS的误差源、检定方法及检定设备,已经取得了丰硕的成果[1-2]。但国内还主要是关注TLS在各种工程中的应用,缺乏对TLS的误差源、检定方法及检定设备等的研究。由于TLS的检定项目众多,无法在本文中全都涉及,本文仅研究TLS鉴别率的检定。
二、分辨率与鉴别率
1.鉴别率的定义
按照原国家质量技术监督局的定义,鉴别率是指当测量仪器在某一示值给以一定的输入,这种激励变化缓慢从单方向逐步增加,当测量仪器的输出产生有可觉察的响应变化时,此输入的激励变化称为鉴别率[3]。产生鉴别率的原因与仪器的内外部噪声等有关。
对TLS而言,鉴别率则是指用点云数据能够区分与测量方向垂直的表面上的纵横方向上点位差异的能力[4]。通俗地讲就是通过对点云数据进行处理后,获取被测物体最小缝隙的能力,即当被测物体表面的缝隙多宽时,利用点云数据才能够清晰地识别出来。
2.分辨率的定义
TLS的分辨率是指扫描点的采样间隔,反映了对被测物体扫描的精细程度。在对被测物体进行扫描之前,要依据激光束发散角的大小以及距离的远近设置TLS的分辨率。图1表明不同分辨率所获取扫描数据的情况。
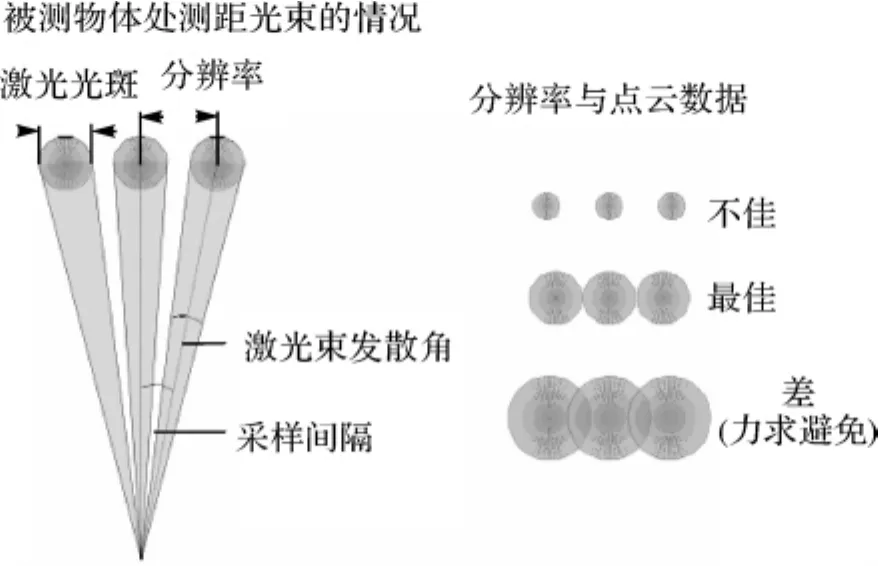
图1 地面激光扫描仪分辨率与点云数据[5]
从鉴别率与分辨率的定义可以看出,二者是不一致的。鉴别率需要通过一定的检定设备和检定方法才能够获得,而采样率则可以在TLS上进行设置。鉴别率受采样率、测距光束发散角、测距光束入射角、测距信号处理能力及返回的受噪声污染的测距信号等的影响,影响量的大小随距离测量偏差改变,因此TLS的鉴别率直接与被测距离相关。
三、鉴别率的检定方法
1.检定设备
鉴别率的检定是采用Böhler-Sterne鉴别率板来完成的。它是由德国美因茨高等专业学院的Böhler-Sterne博士于2002年设计完成的[4],经过多次改进,形成目前的形式[2],如图2所示。
鉴别率板由前、后两个相互平行的平板组成,在两个平板上均涂有薄薄的漫反射材料,两个平板之间的间距为b。前面的平板有规律地开凿出一些扇形缝隙,每个扇形的中心角相等,为γ。由于制造工艺的限制,在扇形中心点有一个半径为r0的圆无法开出缝隙。通过设置扇形缝隙的不同位置,能够使TLS扫描一个扇面时,获得从r0·γ至rmax·γ范围内的不同缝隙宽。鉴别率AV(D)用Böhler-Sterne鉴别率板上最小缝隙的宽度rmin·γ来定义。
Böhler-Sterne鉴别率板的大小及形状等参数需要先进行检测,其检测结果的测量不确定度为被检参数的1/3。
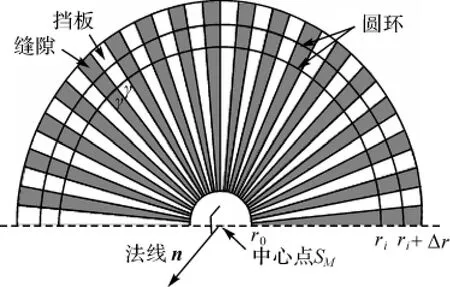
图2 Böhler-Sterne鉴别率检定板[2]
2.检定方法
由于鉴别率直接与被测距离相关,因此在检定鉴别率时,至少需要将Böhler-Sterne鉴别率板放置到3个位置上进行检定。选择这3个距离时,应考虑鉴别率板至TLS的距离均匀分布在生产厂家和仪器使用者共同认可的范围内。
Böhler-Sterne鉴别率板安置到每个位置后,必须以小于 1°的测量不确定度进行准直;Böhler-Sterne鉴别率板至仪器的距离,也必须进行测量,其测距精度为被检参数的1/3。安置完Böhler-Sterne鉴别率板后,需要采用统一的分辨率对鉴别率板进行完全扫描。
3.数据处理
(1)鉴别率板准直方向的确定
首先计算出TLS与鉴别率板的准直关系。在确认测量点位于Böhler-Sterne鉴别率板前面的挡板上时,这些点才能够作为计算“实测平面”的原始数据。按最小二乘法计算的原理,依据这些选定的测量点计算出“实测平面”,该平面的法线向量n(如图2所示)即为Böhler-Sterne鉴别率板的准直方向。
(2)鉴别率的计算
采用分割数据的方法计算出扫描点至鉴别率板中心的距离vi,vi应该满足

式中,Δr为分割数据时选择的圆环宽,其最大值为Böhler-Sterne鉴别率板最大半径的1/10。
在任意距离D上选定Δr后,对每一个扫描点均可以计算出前后板之间的距离差Δlj,m,再与已知值Δlj,k求差

对于每一个扫描点均按式(2)计算出ΔL并进行假设检验。原假设为

当以显著水平α通过式(3)的原假设时,找出圆环的最小半径rmin及点云分割圆环宽Δr,则TLS的鉴别率AV(D)为

四、鉴别率检定结果
文献[7]采用上述原理对3台TLS进行了鉴别率检定,其结果如表1所示。表2为这3台仪器的技术指标。
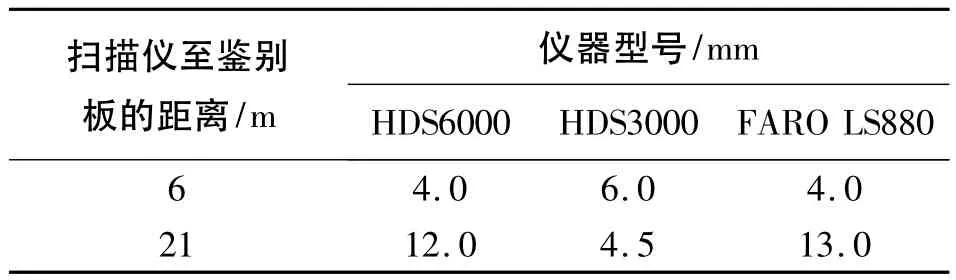
表1 鉴别率检定结果[7]
五、结束语
鉴别率是评价TLS品质最主要的技术指标之一,也是高效使用TLS的前提。过高地选择分辨率不仅将耗费大量的测量时间、大量增加点云数据量,而且也无助于人为提高TLS的鉴别率。本文提供的TLS鉴别率的检定方法和检定设备在国外已经成功地使用多年并得到了仪器生产厂家的认可,因此该结果可为我国地面激光扫描仪检定规程的制定提供参考。
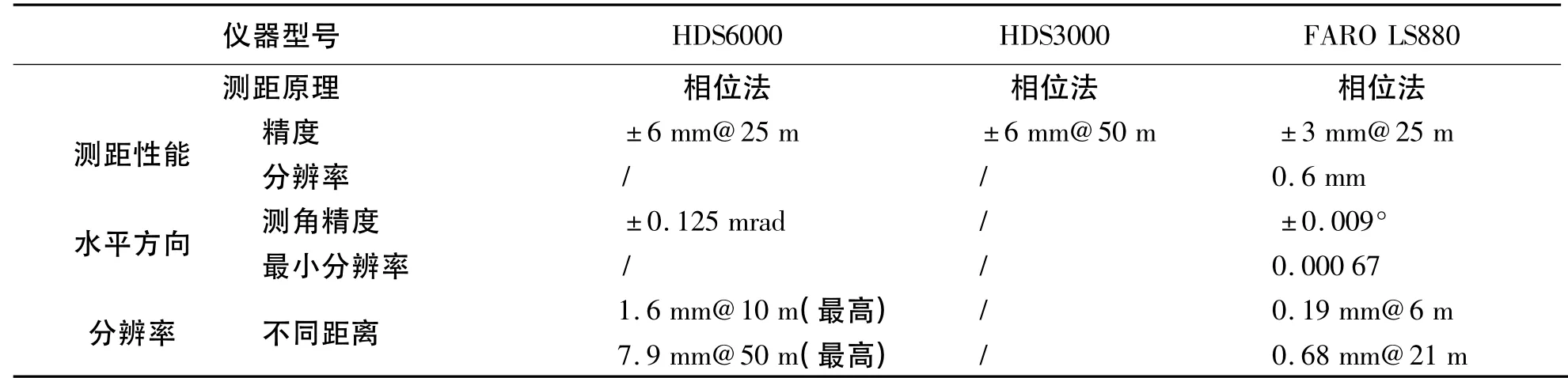
表2 3台TLS的技术指标
[1] SCHULZ T.Calibration of a Terrestrial Laser Scanner for Engineering Geodesy[D].Zürich:Die Eidgenössische Technische Hochschule Zürich,2007.
[2] RESHETYUK Y.Investigation and Calibration of Pulsed Time-of-flight Terrestrial Laser Scanners[D].Stockholm:Royal Institute of Technology(KTH),2006.
[3] 国家质量技术监督局.通用计量术语及定义解释[M].北京:中国计量出版社,2001.
[4] KERN F.Prüfrichtlinie zur Abnahme und Überwachung von Terrestrischen Laserscanner-Systemen-ENTWURF V1.0.1[EB/OL].[2010-09-06].http:∥www.xdesy. de/paper/TLSRichtlinie.06.pdf.
[5] RIETDORF A.Automatisierte Auswertung und Kalibrierung von Scannenden Messsystemen mit Tachymetrischem Messprinzip[D].Berlin:Technischen Universität Berlin,2005.
[6] BÖHLER W,VICENT M B,MARBS A.Investigating Laser Scanner Accuracy[C]∥The XIXthCIPA Symposium at Antalya.Turkey:[s.n.],2003.
[7] KERN F,HUXHAGEN U.2008.Ansätze zur Systematischen Kalibrierungund Prüfung von Terrestrischen Laserscannern(TLS)[C]∥Terrestrisches Laserscanning (TLS 2008).Augsburg:Schriftenreihe des DVW,Band 54,Wiβner,Augsburg,S,2008:111-124.
Research on Verification Method for Discrimination of Terrestrial Laser Scanner
WANG Shouguo
0494-0911(2011)06-0045-03
P204
B
2010-03-02
王守国(1970—),男,天津静海人,高级工程师,主要从事测绘生产和管理工作。
