激光驾束制导仪中调制盘的设计
2011-11-06李娜,王红
李 娜,王 红
(1.中国科学院长春光学精密机械与物理研究所,中国科学院光学系统先进制造技术重点实验室,吉林长春130033;2.中国科学院研究生院,北京100039)
1 引言
世界上采用激光驾束制导的导弹已经经历了三代,第一代以RBS-70地空导弹系统为代表,第二代为瑞士和美国联合研制的防空/反坦克(ADATS)系统,第三代为法、德、英等国联合研制的反坦克导弹TRIGAT制导系统。激光驾束制导是激光制导中的一种指令制导技术,它由地面激光发射系统向目标发射编码激光束并控制导弹在光束中飞行,当导弹偏离激光束中心时,弹上激光接收机和解算装置检测出飞行误差,形成控制信号,控制导弹沿瞄准线飞行,最终摧毁目标。调制盘编码是激光驾束制导的关键技术之一,用于进行激光束的空间位置编码。编码方式有多种,如调幅式、调频式、调相式、调宽式和脉冲编码式。激光驾束制导仪采用的是调频法。这种方法的优点是:抗干扰性能好,解码器识别固定频率,比识别幅度等参数不易受干扰;编码方式简单,易实现;对激光器输出的光强分布均匀性没有苛刻的要求。
本文根据某激光驾束制导仪的需求,设计了一种旋转式调制盘,在传统调制盘的设计原理的基础上,提出了变角度设计方法。使用该方法可克服场与场交换处的误码,精确反应坐标的位置信息,实验表明该方法极大程度地提高了制导精度。
2 调制盘空间编码原理
调制盘空间编码原理如图1所示。由激光器发射的连续激光,经聚光系统后由调制盘外码道入射,经转像光学系统由内码道出射,再经变焦距物镜后,将已调制的激光信号发射出去,形成供导弹识别坐标位置的空间激光信息场,弹上接收机接收导弹位置信息信号,传输至弹上计算机,控制导弹飞行。
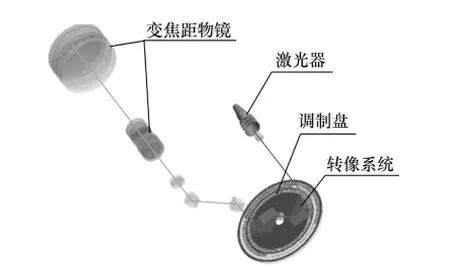
图1 调制盘空间编码原理Fig.1 Spatial encoding functional diagram of modulation disk
3 调制盘设计
3.1 单双调制盘的选择
为实现空间信息场方位(Z场)和高低(Y场)两场的交替出现,可采用单调制盘双码道和双调制盘单码道两种结构形式。
双调制盘单码道方案中高速直流伺服电机通过齿轮组分别驱动两个调制盘旋转,两个调制盘分别产生高低和方位信息场,两调制盘和两码道的尺寸完全相同。这种方案的缺点是齿轮精度要求高,加工难度大;占用空间体积大。
单调制盘双码道方案是在一块调制盘上刻蚀两条同心但不同半径,而径向宽度相同的码道,激光通过外码道入射,经过一倍转像光学系统从内码道岀射,实现两场的信息交替。该方案所占用的空间体积小,有利于制导仪的箱体内部布局。因此本文选用了单调制盘双码道方案。
3.2 码道设计
3.2.1 码道宽度设计
调制盘码道宽度b经过变焦光学系统后,形成光斑信息场。码道宽度b的选择受两方面限制:(1)变焦距的体积和重量。码道宽度越宽,相当于光学系统的视场增大,变焦距的径向尺寸也加大,不利于减轻制导仪的体积和重量;(2)若空间光斑信息场的直径φ为定值,则整个光学系统的倍率β只与码道宽度b有关,码道宽度越宽,β越小,变焦距在空间信息场上的光轴漂移量越小,制导精度越高。以上两个因素互相影响和制约,因此,本文选择调制盘码道宽度b为1.65 mm,使变焦距尺寸适中,光轴漂移满足要求。
3.2.2 两码道相对位置
外码道的A点运动方向与高低方向垂直,因此外码道表征高低方向;内码道的B点运动方向与水平方向垂直,因此内码道表征水平方向。根据制导仪的实际布局确定,激光的入射点为A点,岀射点为B点。为保证两场信息的顺序交替,需满足以下几点要求:
(1)两码道所在的圆周180°刻蚀调制码,另外180°空白;
(2)两码道彼此相错90°;
(3)A点为外码道的起点,B点为内码道的起点或者A点为外码道的终点,B点为内码道的起点,如图2所示。
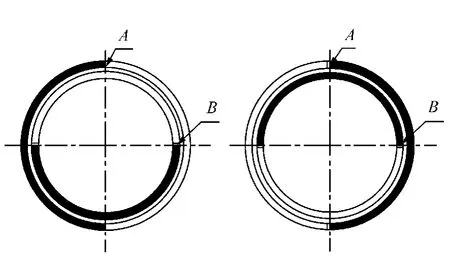
图2 两码道的相对位置Fig.2 Relative positions between inner and outer code paths
4 调制频率设计
4.1 最大可接受分辨率
为表征导弹的高低和方位信息,每个码道至少有两种频率,最简单的编码方式如图3所示。图3是将调制盘的内码道半圆展开,则呈矩形状,矩形高是光带的180°范围,矩形宽是半圆周的径向范围,码道内只有f1和f2两种频率。由频率f1和f2扫过弹上接收机的时间τf1,τf2可以确定导弹的空间位置C。从图3看出,由于只有两种频率的码,每种频率的利用率只有50%。频率的分辨率由下式计算:

图3 调制盘内码道半圆展开图Fig.3 Developed representation for inner code path of modulation disk

所以在线性区直径φ'一定情况下,分辨率的大小取决于频率码的数量n1。在确定最大可接受分辨率后,可确定n1,则剩余3种频率码的数量要大于n1。
4.2 频率值的确定
由于大气抖动和漩流会使空间频率码变形,变形后的码频率周期变长或缩短。为此每两种频率的确定,要以接收机能区分开为前提,这就要求两种码的周期之差要大于10 μs。
根据最大可接受分辨率和两频率的周期之差大于10 μs两个原则,当调制盘转速为100 r/s时,确定内外码道的4种频率如下:
频率 f1在180°范围内100 对码,f1=20 kHz,周期0.05 ms;
频率f2在180°范围内125 对码,f2=25 kHz,周期0.04 ms;
频率 f3在 180°范围内 166对码,f3=33.2 kHz,周期 0.03 ms;
频率f4在180°范围内250 对码,f4=50 kHz,周期0.02 ms。
但以上设计出现了在20~50 kHz,频率范围越宽,抗干扰能力越差的特点,这给接收机电路设计造成很大难度。为此,本文提出每个码道3种频率的方案,即内码道有f1,f2和f5,外码道有f3,f4和f5,内、外码道的频率f5相同,刻蚀密度大,分辨率高,如图4所示。内码道所在圆环的半径分别为R1和R2,f1外半径为R1,每对的内半径呈线性减小变化。f2内半径为R2,每对的外半径呈线性增大变化。f5的内半径和外半径均呈线性增大变化,外码道分布与内码道同理。图4和图5分别为调制盘局部放大图和平面示意图。
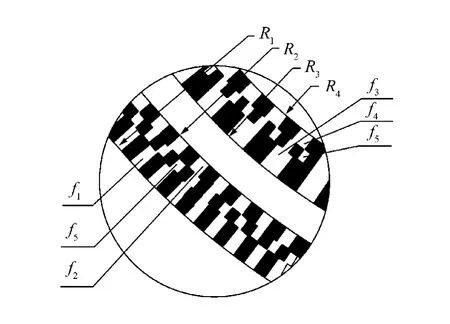
图4 调制盘局部放大图Fig.4 Partial enlarged detail of modulation disk
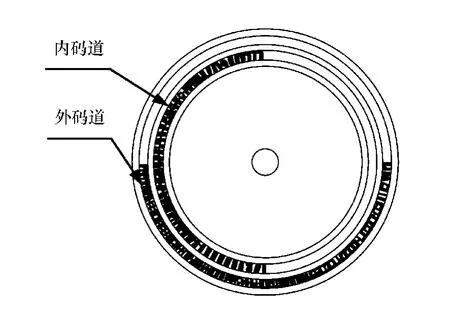
图5 调制盘平面示意图Fig.5 Schematic plan of modulation disk
4.3 偏航信息原理
将调制盘的内、外码道半圆展开,则呈矩形状,矩形高是光带的180°范围,矩形宽是半圆的径向范围,内码道为R2~R1,外码道为R3~R4,如图6所示。内码道从上向下移动,扫过接收机,表征导弹的左右位置信息;外码道从左向右移动,表征导弹的高低位置信息。弹上接收机通过接收频率 f1,f2,f3,f4的扫描时间 τf1,τf2,τf3,τf4计算表征位置信息的调制系数Kz和Ky,可由下式计算得到:
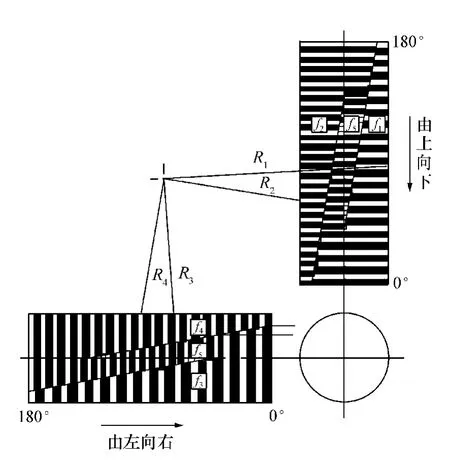
图6 调制盘给出偏航信息原理图Fig.6 Schematic diagram of modulation disk defining deviation information


Kz>0,导弹右偏;
Kz<0,导弹左偏;
Ky>0,导弹上偏;
Ky<0,导弹下偏;
Kz=0,Ky=0,导弹零偏,位于信息场中心。
5 变角度设计
调制盘按3.2中的原理工作时,内码道产生的调制光是上下扫瞄,外码道产生的调制光是左右扫瞄,由于各频率明暗相间的码是按调制盘的直径方向刻制的,各频率与扫描方向垂直,在场与场(一码道起始与另外一码道的末尾)的交接处,会产生两码道的码重叠或丢失,使接收机不能识别信号,最终影响制导精度。接收机的位置不同,误码情况不同,图7为z场(内码道末尾)与y场(外码道起始)的交接示意图。扫过透光区高电平,非透光区为低电平,当接收机位于位置1时,f3与f2重叠,输出波形如图8所示;当接收机位于位置2时,透光时间变长,输出波形如图9所示;只有接收机位于位于位置3时,输出信号正常,输出波形如图10所示。
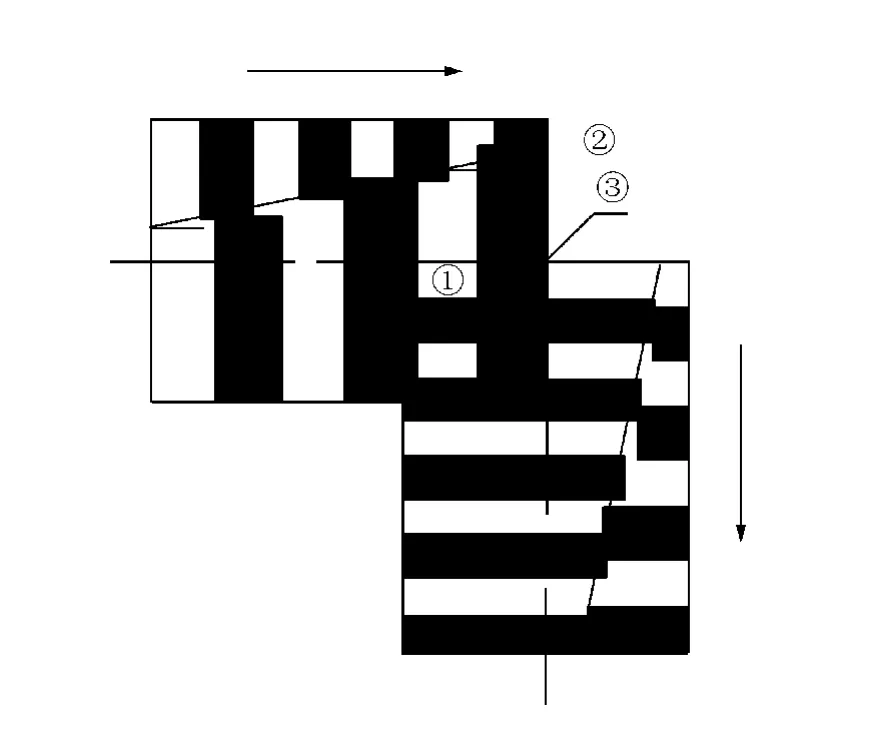
图7 z场与y场的交接示意图Fig.7 Schematic of crossover position between z field and y field

图8 接收机位于位置1时的输出波形Fig.8 Output waveform of receiver in position 1

图9 接收机位于位置2的时输出波形Fig.9 Output waveform of receiver in position 2

图10 接收机位于位置3时输出波形Fig.10 Output waveform of receiver in position 3
针对上述问题,基于原调制盘设计思想,将各频率沿径向方向旋转45°,如图10所示,使弹上接收机不论位于信息场任何位置时,场与场交接处均不会出现丢码或错码,输出信号正常,从而保证了5 ms的场周期,提高了制导精度。图11和图12分别为变角度调制盘内、外码道展开图和平面示意图。

图11 变角度调制盘内、外码道展开图形Fig.11 Developed representation for inner and outer code paths of changing angle modulation disk
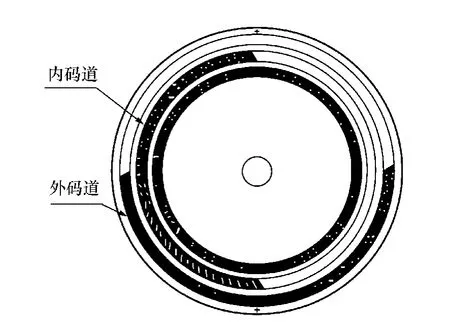
图12 变角度调制盘平面示意图Fig.12 Schematic plan of changing angle modulation disk
6 结论
根据激光驾束空间编码原理,设计了某激光驾束制导仪中使用的旋转调制盘,给出了该调制盘的型式、内外两码道和5种频率值。根据各频率的扫描时间,计算出调制系数Kz和Ky,以表征导弹的坐标位置信息。在传统调制盘的设计原理基础上,提出了变角度调制盘设计方法,从而克服了场与场交接处的误码,精确反应了坐标的位置信息。对制导仪工程样机的测试表明,变角度调制盘设计结果合理可行,很大程度上提高了制导精度。
[1] 江月松,钟宇,李亮.某型号瞄准制导仪中的调制盘图案的设计[J].光学技术,2005,31(1):73-76.JIANG Y S,ZHONG Y,LI L.Design of patterns of modulation disk in a certain modal of guided sight instrument[J].Opt.Technique,2005,31(1):73-76.(in Chinese)
[2] 江月松,钟宇,李亮.瞄准制导仪中的调制盘光学系统分析[J].光学技术,2005,31(2):200-201.JIANG Y S,ZHONG Y,LI L.Analysis of optical system of modulation disk in a certain modal of guided sight instrument[J].Opt.Technique,2005,31(2):200-201.(in Chinese)
[3] 钱义先,程小薇,张剑家,等.激光驾束制导系统编码调制技术的研究[D].长春:长春理工大学,2006.QIAN Y X,CHENG X W,ZHANG J J,et al..Research of encoding and modulating technology on laser beam-riding guidance[D].Changchun:Changchun University Science and Technology,2006.(in Chinese)
[4] 苗瑞生,刘藻珍.反坦克炮射导弹研究分析报告汇编[G].北京:北京理工大学,1995.MIAO R SH,LIU Z ZH.Antitank Gun-delivered Missile Research Report Assembly[G].Beijing:Beijing institute of science and technology,1995.(in Chinese)
[5] 杨宜禾,岳敏,周维真.红外系统[M].2版.北京:国防工业出版社,1995.YANG Y H,YUE M,ZHOU W ZH.Infrared System[M].2nd ed.Beijing:National Defense Industry Press,1995.(in Chinese)
[6] 徐南荣,卞南华.红外辐射与制导[M].北京:国防工业出版社,1999.XU N R,BIAN N H.Infrared Radiation and Homing[M].Beijing:National Defense Industry Press,1995.(in Chinese)
[7] 马利国,伍波,周鼎富,等.10.6 μm激光驾束制导仪激光编码调制器设计[J].红外与激光工程,2010,39(1):71-75.MA L G,WU B,ZHOU D F,et al..Design of the code modulator on 10.6 μm laser beam-riding guidance instrument[J].Infrared and Laser Eng.,2010,39(1):71-75.(in Chinese)