地震检波器弹簧片视觉识别系统设计
2011-11-04段亚玲余正杰
邵 欣 段亚玲 余正杰
(西安物探装备分公司技术研发中心 陕西西安)
地震检波器弹簧片视觉识别系统设计
邵 欣 段亚玲 余正杰
(西安物探装备分公司技术研发中心 陕西西安)
视觉识别技术是生产线自动化过程中重要的前沿技术之一,在石油地震检波器生产过程中,检波器弹簧片的自动定向及版型识别又是生产线自动化的一个关键环节。介绍了一种检波器弹簧片视觉识别系统设计方案,并主要对视觉识别应用于弹簧片的设计原理进行了分析。
检波器;弹簧片;视觉识别;SUSAN算法
0 引 言
动圈式地震检波器以其性能稳定和价格低廉等优点,在地震勘探生产中广泛使用。国内外地震检波器制造厂商都在努力应用新技术、新方法,不断提高生产线的自动化水平,以减小制造过程中人为因素对产品质量的影响,从而提高产品合格率、降低生产成本。
弹簧片是检波器中至关重要的弹性部件。弹簧片的多片分离、定位、版型识别、抓取等工艺是检波器生产线自动化中的难点。生产过程中弹簧片的尺寸测量等都是通过光学系统完成的,多年的检波器生产实践,我们总结出弹簧片具有非常突出的视觉特点:首先,不论弹簧片镀金与否,其外观颜色均匀度很高。其次,弹簧片的内缘和外缘都是非常标准的圆形。最后,弹簧片还有独特的腐蚀连接用的耳朵。这些视觉特点都非常适合用机器视觉的方法来进行定位及版型识别。因此,设计一种适用于弹簧片的机器视觉系统,来对其进行定位及版型识别尤为重要。
1 视觉识别系统构成[1]
弹簧片的视觉识别系统是以计算机为主的实时图像处理系统,由光学照明系统、工业摄像机、图像处理软件、动作控制等部分组成,如图1所示。

图1 视觉识别系统构成
2 视觉识别系统流程设计
视觉识别系统的设计结构关键在于识别算法的选择,弹簧片视觉识别系统设计结构流程如图2所示。

图2 视觉识别系统设计流程图
在该算法的应用过程当中,考虑到自动生产线工作现场的实际情况,为了有效地提取预存模板图像的特征点,我们使用加强黄色的灰度图像,同时还要对获取的弹簧片图像进行了预处理,以便提取出图像当中的几何特征,这些预处理主要包括减小和滤除图像中的噪声、边界锐化等。这其中滤波和分割是提取预模板图像几何特征前的两个重要步骤。
3 图像精度分析及滤波器设计原理[2]
识别系统的数字图像精度首先决定于成像系统分辨率,但是成像系统的价格是随其分辨率的增加而呈指数上升的,因此这种靠增加成像系统分辨率来提高图像精度的途径是不经济和有限的,就本系统而言,成像系统分辨率为1 280×1 024就足以满足应用需求。
除了上述成像系统分辨率决定图像精度外,成像系统的几何畸变也会影响系统的图像精度。几何畸变主要会影响图像中弹簧片的几何位置及几何形状。几何畸变主要由于透镜系统像差及透视误差引起,是一种典型的系统误差。而弹簧片识别系统采用位置固定及静止图像的方法,在对弹簧片模板进行标定,因此提高识别系统的定位精度、根据模板进行标定都可以减小几何畸变误差。
识别系统的图像在成像、数字化过程中难免会有各种干扰,这些干扰就会形成噪声。这些噪声使得图像上的像素点灰度值不能正确地反映空间物体对应点的光强值。对于本系统来说,噪声主要来源于光子噪声、暗电流噪声、光响应非均匀性噪声、读出噪声、杂波噪声。一般来说,这些噪声在图像中都表现为高频信号,因此一般的滤波器都是通过减弱和消除傅立叶空间中的高频分量来达到滤波的目的。然而,弹簧片中的各种结构细节,如:边缘和角,也都属于高频分量,因此,如何在滤除噪声的同时最大限度地保留图像中的结构特征,一直是图像滤波研究中的主要方向。
线性滤波器有移动平均滤波器和高斯滤波器等,非线性滤波器中最常用的有中值滤波器和SUSAN(Smallest Univalue Segment Assimilating Nucleus)滤波。其中SUSAN滤波可以在滤除图像噪声的同时很好的保存物体的其它结构特征,能够满足弹簧片视觉识别系统中对定位模板图像进行噪声平滑的效果要求。SUASN方法是一类图像处理算法的总称,包括滤波,边缘提取,角点提取,所有这些算法的基本原理都是相同的。
SUSAN滤波实质上是加权平均的均值滤波,相似度测试函数为它的加权因子。式(1)定义了相似度测试函数,它衡量了像素S[i,j]与其领域内各像素S[i-m,j-n](m,n为偏移量)之间的相似程度。可以看出:相似度测量函数不仅比较了S[i-m,j-n]和S[i,j]灰度值的差异,而且还考虑了S[i-m,j-n]与S[i,j]之间距离的影响。

式(1)中,S[i-m,j-n],S[i,j]为像素的灰度值,T是衡量灰度值相似程度的阀值,其取值对滤波结果影响较小。其中:θ可认为是高斯平滑滤波器的方差,θ取较大的值可以得到较好的平滑效果,θ取较小的值能保持图像中的细节,经过多次实验,我们认为取θ=4.0较为合适。
但我们是不是可以这样去想,具体的文本形式尽管各不相同,但无非都是为了树典型立榜样或者指出不足针砭时弊,文本的社会价值和给人有益的启示也往往成为出题人必须观照的思考点。
相似度测量函数定义的滤波函数如式(2):

式(2)中,S[i,j]是像素滤波后的灰度值。由式(2)可知,相似度大的权值就大,因此对滤波结果的影响较大,相反则影响较小。SUSAN滤波不包括中心点本身,可以有效的去除脉冲噪声。经过SUSAN滤波后效果对比图如图3所示。
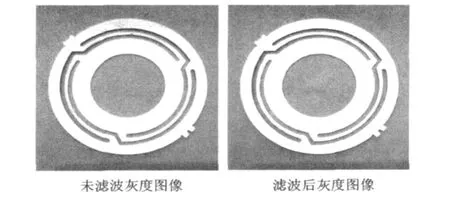
图3 SUSAN滤波后对比效果
4 图像分析算法选择
经过滤波去除噪声干扰之后,下一个环节是把弹簧片图像分离成互不重叠的有意义的区域,在弹簧片的图像中可以做到分离出单一区域。分类的依据是像素的频谱特性,空间特性,灰度值等。这实际上是由图像处理过渡到图像分析的重要一环,也是一种通用的计算机视觉识别技术。图像分割的算法可分为两大类:基于度量空间的灰度阈值分割法和基于空间区域增长分割法。对于弹簧片识别系统而言,图像主要有背景灰度与弹簧片灰度二个灰度构成,因此基于度量空间的灰度阈值分割法更为适用。相当于对图像进行二值化处理。阈值一般由图像的灰度直方图计算得到。我们采用迭代算法针对双峰直方图进行了阈值计算。效果比较满意。迭代算法是针对双峰直方图计算分割阈值的方法。既首先确定图像中最大和最小灰度值Mmax和Mmin,令初始阈值为:
根据T将图像分成目标和背景两部分,分别求出两部分的平均灰度值:

式中,i为灰度值,ni为灰度值等于i的像素个数,由此得到新的阈值:
如果:Tk+1=Tk,则迭代过程结束,否则继续。
5 几何边缘角点提取[3]
几何特征点集是能正确反映定位标志位置点的集合,特征的选择对最终的模板匹配有重要影响。几何特征点数目越多匹配精度越高。但速度相对会慢。数目越少匹配精度会差。因此,我们经过多次实验尽量选择了最合适的几何特征点,对匹配的速度和提取边缘集合精度两者都兼顾的原则。为提取定位模板的几何特征点集,首先利用迭代算法对图像进行分割,然后利用SUASAN边缘和角点提取算法得到定位模板的几何边缘点。
SUSAN几何边缘提取,是在给定大小的窗口中对像素进行运算,得到窗口中心点处的角点初始响应,再在所有初始响应中寻找局部极大值,得到最终的几何边缘点集,其算法如下:
(1)由式(3)计算窗口中灰度值与窗口中心像素相似的像素个数n(x0,y0):

重复(1)(2)得到图像中所有像素处的角点初始响应,最后寻找局部极大值得到边缘点集和角点的位置。几何阈值对输出的结果有一定影响,它不仅影响输出角点的数量,更重要的是它还影响输出角点的形状,例如,当减小几何阈值时,被检测出的角点将会更尖锐。灰度差阈值T对输出的角点的几何形状的影响不大,但它会影响输出角点的数量。因为灰度差阈值定义了窗口中容许的最大灰度变化,而在弹簧片中,图形模板与其背景图像融合处灰度变化是最大的,所以当减小灰度阈值时,算法可以检测出图像中更微小的边缘几何变化,输出更多的角点。
显而易见,在弹簧片视觉识别系统中,如果以模板图像的几何特征点作为依据,那么特征点的数量将会显著减小,运算时间也大大缩短,可以大幅度提高弹簧片的定位速度。
输入的弹簧片图像经上述处理后,得到弹簧片的几何边缘集合结果如图4所示。
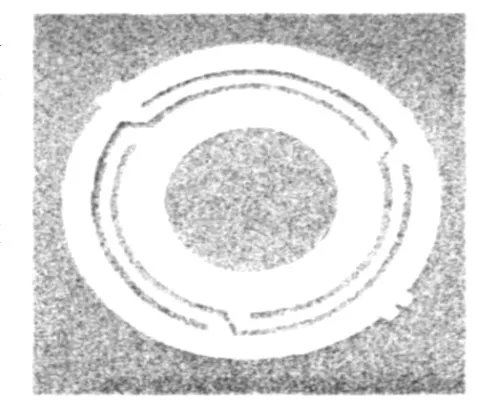
图4 弹簧片的几何边缘集合
根据提取的几何边缘集合,可以计算得到相应的对称轴线及与模板一致的轴线方向。
6 结束语
本文提出了一种用于检波器弹簧片视觉识别的设计原理,并根据该原理给出了部分处理结果,这些结果已经在PC机上实现。在检波器生产线的自动化过程中,这种视觉识别设计是具有非常重要的现实意义。
[1] 于起峰.基于图象的精密测量与运动测量[M].北京:科学出版社,2002
[2] 章毓晋.图象工程(上册)-图象理解和计算机视觉[M].北京:清华大学出版社,2000
[3] 冈萨雷斯.数字图像处理[M].北京:电子工业出版社,2003
PI,2011,25(1):10~12
Machine vision is one of the advanced methods about automatic production line.During the course of Seismic Geophone production,the automatic directing property and distinguish property of the Geophone spring are the key link in the automatization of the production line.The paper introduces a new type of Geophone spring vision system,including its principle and technical specification.
Key words:Seismic Geophone,Geophone spring,machine vision,SUSAN arithmetic
Design of machine vision system for Seismic Geophone spring.
Shao Xin,Duan Yaling and Yu Zhengjie.
P631.4+36
B
1004-9134(2011)01-0010-03
邵 欣,女,1968年出生,工程师,1991年合肥工业大学机械制造及工艺专业,现在中石油东方地球物理勘探有限责任公司西安物探装备分公司技术研发中心,从事技术研发工作。邮编:710082
2010-08-11编辑:梁保江)