液位实时自动跟踪测量系统*
2011-10-20孙长库贾伟广
徐 驰,孙长库*,王 鹏,贾伟广
(1.天津大学精密测试技术及仪器国家重点实验室,天津 300072;2.国家海洋标准计量中心,天津 300112)
在实际应用中,液位测量是一个普遍的测量任务,比如用于模仿海浪形态检定浮子的验潮仪,城市给排水系统水塔的水位监视等。传统的液位测量方法有微波式[1]、电容式、超声波式、差压式和电导式[2]等。电容式[3]方法受到测量范围的限制,同时要求被测液体具有导电性;超声波[4]式方法在测量过程中容易受到环境因素的影响而降低回波的信噪比,降低测量精度;差压式[5]方法要求被测液体密度相对稳定,负向导压管内静压力要基本恒定,正负导压管内不能有任何结晶堵塞,严格限制了该方法的应用范围。
近几年随着计算机视觉理论的不断发展和成熟,视觉测量方法[6]被广泛应用到高精度、非接触式、测量中,其中的模式识别方法发展速度尤为明显。模板匹配[7-8]方法以其速度快、适应性强的优点成为较为理想的模式识别方法。模板匹配[9]就是在一幅目标图像中根据已知模板搜索相匹配的子图像的过程,主要包括两个过程:计算目标图像中子图与模板的相似度以及根据各点的匹配相似度搜索出最佳匹配位置,国内外学者相应地提出了很多计算相似度的方法以及搜索最佳匹配点的方法[10-11]。
本文利用NCC模板匹配方法识别钢尺的刻度值,结合钢尺图像的灰度特征和钢尺的结构特征确定钢尺的刻线位置,利用水管图像的灰度特征识别液位的位置,根据测得的液位位置反馈控制电机,使电机带动CCD相机实时跟随液位进行测量。
1 液位测量原理
系统整体方案如图1所示,封闭的水罐和塑制测量管组成连通器,通过检测测量管管内的水位即可测得水罐内的水位;控制系统根据实测的水位位置控制电机,实现自动跟踪测量,整体过程为:首先电机带动CCD相机沿导轨运动到初始测量位置获取水管和钢尺图像,然后对图像进行区域分割,确定出钢尺区域,接下来进行二值化预处理,识别钢尺上的数字刻度值,然后识别出钢尺上的刻线位置并确定每一条刻线对应的高度值,最后确定出测量管内水位的位置,控制系统根据水位的位置调整电机位置,使水位的像素位置保持在屏幕的固定区域,最终完成一次测量。同时为了能够在光照条件较差环境下完成测量任务,该系统在镜头前方安装了环形LED光源,可以比较明显的改善弱光照环境。
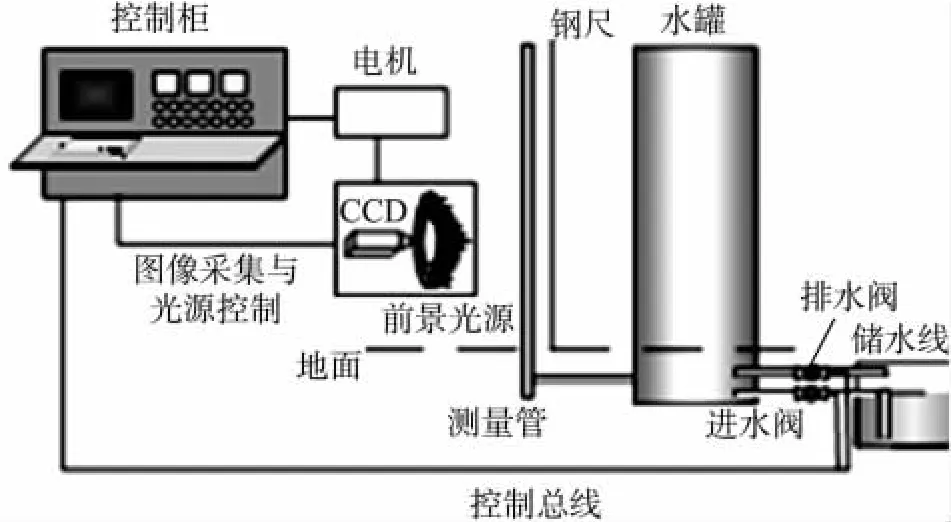
图1 系统整体方案
相机采集的图像如图2所示,测量原理如图3所示,ν0是水位的像素位置,ν1、ν2是距离 ν最近的刻线的像素位置,n1、n2是刻线 ν1、ν2对应的高度值,通过ν1和ν2将两条刻线间的空白区域依据像素进行细分,然后根据式(1)计算出水位高度h。


图2 水管和钢尺图像

图3 测量原理图
2 钢尺刻度识别
2.1 确定钢尺区域
为了提高刻度识别速度,模板匹配过程只在钢尺区域中搜索子图,因此需要确定出钢尺区域。从图2中可以看出钢尺区域的灰度水平处在整幅图像低灰度区域,因此在钢尺区域的边缘处会有明显的灰度跳变,利用这个特征可以识别出钢尺区域。
假定钢尺宽度为d,图像灰度用f(i,j)表示,图像大小为M×N,选定图像的任一行按照式(2)得到Gm,找出Gm的最小值所对应的m便是钢尺的左边缘L,从而确定了钢尺区域。

2.2 图像二值化
在计算相关因子过程中有大量的乘法计算,因为计算机对零的乘法运算所需时间很少[12],因此在匹配前对钢尺区域做二值化处理,然后利用二值化后的图像制作模板,完成后续识别,可以大幅度的提高算法的运算速度。
图4是钢尺刻度区域的灰度直方图,此灰度直方图呈双峰形状[13],因此钢尺的刻度和背景在灰度级上有着明显的区别,利用全局阈值法确定二值化阈值。

图4 刻度值附近灰度直方图
2.3 模板匹配
2.3.1 选择相关因子
目前模板匹配中常用的相关因子有SSD(Sum of Squared Difference)因子、SAD(Sum of Absolute Difference)因子、ZSAD(zero mean SAD)因子和NCC(Normalized Cross Correlation)因子[14-15]。假定在图像f(i,j)中依据大小为Mt×Nt的模板t(i,j)进行匹配,利用式(3)计算NCC相关因子。
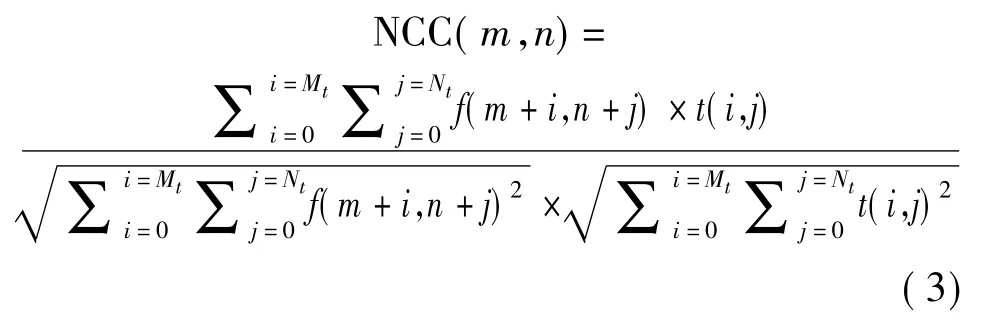
NCC因子在实际应用过程中有着更好的鲁棒性,本文选择了NCC因子作为模板匹配相关因子,图5 是刻度“155”分别与模板“0”“1”“5”匹配后的相关因子曲线,NCC因子值越大,表示匹配程度越好。

图5 刻度“155”的NCC相关因子曲线
2.3.2 搜索最佳匹配位置
以识别刻度“155”中的“5”为例,由于存在两个待识别位置,图5(c),因此如果仅以搜索相关因子的最大值为依据确定最佳匹配点位置并不能完成识别任务。为此本文提出如下钢尺刻度识别算法:
(1)根据NCC相关因子判断是否有匹配点:找出NCC相关因子的最大值 NCCmax,如果 NCCmax>Rmax(在实验中Rmax取值为0.65),确定候选匹配点的相关因子范围[NCCmax-δ,NCCmax](δ在实验中取0.1),否则进行下一个数字的识别。
(2)确定候选匹配点集P{pt[xya]}(α 是(x,y)点处的相关因子值):对所有的匹配点进行遍历搜索,选择 α∈[NCCmax-δ,NCCmax]的点为候选匹配点。
(3)确定最佳匹配点。将候选匹配点集P按照α值从大到小进行排序,剔除与P1的y值相差小于σ的匹配点(σ是刻度值每两个数字间的像素距离,实验中取为30),同时选择P1为最佳匹配点集Q{pt[xy]}中的元素,然后对除P1以外的新的候选匹配点集P重复(3)寻找下一个最佳匹配点。
(4)根据最佳匹配点集Q{pt[xy]}得出刻度值。将Q{pt[xy]}按照y值从大到小进行排序,y值从大到小依次对应刻度值的百位、十位和个位,完成刻度识别。
3 钢尺刻线识别
3.1 短刻线识别
钢尺上的刻线和背景有着明显的灰度差异,在刻线处,灰度由高到低,再由低到高连续跳变两次,通过确定灰度突变的位置确定钢尺的刻线。具体算法如下:
首先依据式(4)对§3.1中确定出的钢尺区域做求和运算,假定D为求和区域宽度,L为钢尺左边缘,如图6所示。


图6 求和区域示意图
然后对MI进行差分运算得到DI(图7),找出所有大于DI均值的DI;
最后依据各个DI之间I>10的原则剔除不满足条件的DI,得到刻线点集K{pt[xy]},其中y取DI中的I值,x取钢尺左边缘L。

图7 DI曲线和DI均值
3.2 与刻度值对应刻线的识别
首先确定按照y值从大到小排好序的最佳匹配点集Q{pt[xy]}的中间点Qm:

其中Q1和QN是Q{pt[xy]}中的第一点和最后一点;
然后在点集K{pt[xy]}找到距离Qm的最近刻线点,便确定出了与刻度值对应的长刻线。
4 水位识别
4.1 确定水管区域
为了提高算法的运算速度,首先在确定出钢尺的区域基础上识别出水管区域:
(1)对区域 φ={(x,y)|0<x<L,0<y<N}(L是钢尺左边缘,N是整幅图像的高度)按照式(5)进行列扫描;

(2)对XI做差分运算,找到XI的梯度位置,对应的I便是水管的左边缘J。
4.2 水位提取
为了提高水位识别精度,减少误识别的情况,实验过程中在水管中加入了一个浮子(如图2所示),用来增强水位和背景的灰度区分度。由于像素灰度值在浮子区域处急剧跳变,因此通过确定出此跳变位置便可以确定出浮子位置。
首先依据式(6)在水管区域中进行灰度求和运算,假定水管区域宽度为w,浮子大小为m×w。

其中I=0,1,2,…,N-m+1
J是水管的左边缘
然后对LevelI做差分运算,找到LevelI的梯度位置I,便确定了水位位置。
5 实验结果分析
本文在Visual C++平台上实现了算法并对系统进行了测试,实验中的水罐高10 m,电机可以带动相机沿导轨运动,完成0 m~10 m的测量任务,同时为了防止由于时间长,钢尺生锈等原因,引起钢尺刻度、刻线模糊,导致测量精度下降,在实际应用中,对钢尺进行了镀膜处理,并且采取定期清洗措施。图8是刻度“155”处的实验结果,图8(a)中绿线内部是算法确定出的钢尺区域,图8(b)是钢尺区域二值化后的结果,图8(c)中的红线框内是刻度识别后结果,图8(d)显示了钢尺的刻线识别结果,红线对应的短刻线,蓝线对应的是长刻线,图8(e)是测量管内液位的识别结果,红线显示出了测量管内每一行的灰度梯度情况,梯度最大的位置对应了液位。图9是在固定水位处连续测量24次的数据结果,水位显示值的平均值为1 531.67 mm,标准差为0.06 mm。

图8 “155”刻度处测量效果图
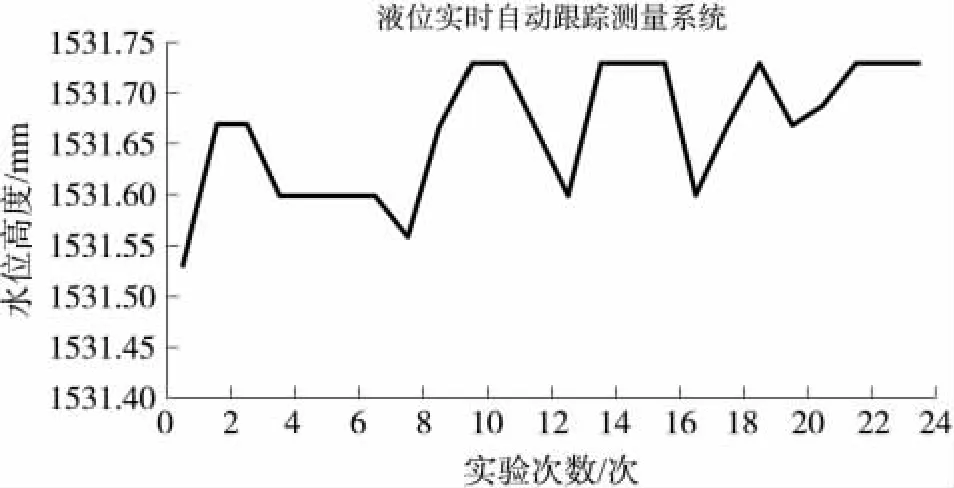
图9 1 531.6 mm处测量结果
6 结论
本文设计了一套以CCD摄像头采集得到的液位和钢尺图像为基础,以视觉检测方法为测量手段的高精度、大范围的实时跟踪快速液位测量系统,该测量系统具有非接触测量、抗干扰能力强的特点,可以被广泛应用在工业环境中的液位测量需要中。
[1]齐国清,贾欣乐.高精度液位测量系统[J].电子测量与仪器学报,1999,6:56-60.
[2]卫开夏,李斌,朱信诚.导电性液体新型液位测量方法研究及应用[J].电子测量与仪器学报,2010,10:964-968.
[3]钟伟,葛召炎,秦康,等.基于电容栅编码传感器的液位测量系统[J].仪表技术与传感器,2010,8:9-11.
[4]王超,潘玮华,刘苏仪,等.一种超声波液位测量仪的设计方案[J].南京师范大学学报,2010,3:44-46.
[5]于香波,张小叶,马俊红.差压式液位计在易挥发介质中的液位测量[J].化工文摘,2005,4:55-56.
[6]韩贺磊,李剑中,冯刚.基于计算机视觉的玻璃制品在线分类识别[J].仪器仪表学报,2006,6:777-778.
[7]安博文,李丹,庞然.基于边界模板匹配算法的集装箱箱号识别[J].科学技术与工程,2010,10(16):4043-4048.
[8]邱立可,王晓年,朱劲,等.基于模板匹配和Tesseract的票据归类和索引[J].计算机与现代化,2010,7:132-135.
[9]关宇东,杨琳,吴萍萍,等.基于图像处理的变造币识别技术[J].仪器仪表学报,2007,10:1852-1856.
[10]Li Hao,Duan Hai-Bin,Zhang Xiang-Yin.A Novel Image Template Matching Based on Particle Filtering Optimization[J].Pattern Recogniton Letters,2010(31):1825-1832.
[11]唐琎,李青.一种快速的模板匹配算法[J].计算机应用,2010,6(6):1559-1564.
[12]孙晓玲,侯德文,储凡静.基于灰度积分投影和模板方法的人眼定位[J].信息技术与信息化,2007,32(4):74-76.
[13]高潮,常永鑫,郭永彩.机械工件数字识别的二值化算法研究[J].光电工程,2010,6(6):1-5.
[14]Lewis J P.Fast Template Matching[C]//Vision Interface,1995:120-123.
[15]Zhao Feng,HuangQing-ming,GaoWen.ImageMatchingby Normalized Cross-Correlation[C]//IEEE International Conference on Acoustics Speed and Signal Processing Proceedings,2006:729-732.