一种阵列式小尺寸温度传感装置*
2011-10-20吴剑锋李建清于忠洲
吴剑锋,王 蕾,李建清,于忠洲
(1.东南大学仪器与科学工程学院,南京 210096;2.南京电子技术研究所,南京 210039)
视觉、听觉、触觉、嗅觉和味觉是人类感知世界的重要方式,人类利用视觉和听觉所具有的快速响应特性识别快速活动物体,通过主动方式的视觉、触觉、嗅觉和味觉实现静态或慢速运动物体或物质的识别。在机器探测未知世界过程中,视听觉、触觉成为主要的在线感知方式,通过视听觉可以快速确定物体的外形、颜色和障碍物的存在,通过力触觉可以感知物体力学特性,通过温度触觉可以感知物体的热学特性。
用于外形识别、接触点分布与定位、声源定位、光源定位的阵列传感器是当今研究的热点[1-8]。从尺寸而言,现有的传感器阵列向着小型化甚至微型化和集成化方向发展,现有的微型阵列传感器可在19.2 mm×19.2 mm范围内实现4096个传感器及其检测电路[9]。由于受到传感器特性限制,温度触觉阵列传感器还比较少见[10-17],应用于温度触觉的阵列式传感器有待于进一步研究,其中传感器的动态响应速度、尺寸以及快速检测方法是温度触觉阵列传感器研究的关键。就温度触觉阵列传感器而言,Franco Castelli[10]设计了一种 8×8 阵列尺寸为 18 mm×18 mm触觉传感器,其中包括的温度触觉感知元件采用铜热敏电阻,可应用于被接触物体的材质热属性识别。Li Ping[11]采用非扫描方式设计了一种具有快速响应的非扫描方式的触觉传感器阵列,将力、压力、温度和生化传感功能集成在一起,采用压电谐振器作为感知元件。Hidekuni Takao[12-13]设计了硅基多功能智能触觉图像阵列传感器,其具有应力和温度感知功能,在3.04 mm×3.04 mm范围内实现了6×6个传感器的集成,在力、压力测量以及力和温度触点定位取得较好结果。Chia Hsien Lin[14]设计了一种具有热、力和微振动传感功能的仿生触觉传感器阵列,同时采集温度信号的交直流部分,主要通过交流部分材质进行识别,对铜、铝、钢和塑料取得了较好的识别效果。Akihiko Nagakubo[15]采用电阻抗成像方法检测压力变形问题,有效的解决了大变形物体触点定位和接触力的分布问题。Y.J.Yang[16]采用集成式温度传感器在160 mm×160 mm实现了32×32温度触觉传感器阵列,较好实现了大尺寸温度物体外形识别。
本文在对现有阵列式传感装置研究的基础上,研制了一种8×16阵列式微小尺寸温度传感装置,提出了一种温度传感器阵列检测方法,减少了微小空间内温度传感器阵列中相邻传感器的相互耦合和干扰,可用于检测空间微小尺寸温度场分布,并可对具有一定温度的被测物体外形进行识别。
1 阵列式小尺寸温度传感装置组成
所设计的阵列式温度感知装置设有主控制器、温度传感器阵列及其测控电路,以温度传感器阵列作为温度感知的核心,其中:温度敏感单元采用微小尺寸测温型高精度NTC电阻,单个元件的平面尺寸不大于2 mm×2 mm;具有阵列交叉分布式结构,共同组成一个8×16矩阵,阵列中每一个测温电阻一端与所在的列线相连,另一端与所在的行线相连,其阵列分布的形状根据需要设定;测量控制电路包括主控制器、多路开关、反馈驱动隔离电路,控制处理器采用含有模拟数字转换器转换模块的控制器。图1为设计所采用的反馈隔离驱动测量电路原理图。

图1 阵列式电阻反馈隔离驱动测量电路原理
2 阵列式电阻反馈隔离驱动测量方法
图2是本设计所采用的电阻测量电路基本原理图,采样分压法测量。对测温电阻RXY和采样电阻RS加一精密恒定电压VI到地,该电压VI在两电阻上产生分压,在采样电阻上取得的电压值VXY与两电阻的比值相关联,其电压值符合

通过已知电压VI、已知电阻RS和测量所得电压VXY,可求解出RXY。通过对该电阻值查表可得该电阻所处位置对应的温度值。对单个或阵列中每个测温电阻都用两根线单独连接则可采用分压法进行测量(如图2所示),则所有的测温电阻共需要2N×M根连接线才能完成测量。

图2 单个热敏电阻的分压法检测原理图
当采用交叉式阵列结构,即阵列中每一个测温电阻一端与所在的列线相连,另一端与所在的行线相连,则N×M个温度传感器的连接线数目为N+M根,可大大减少电阻阵列测量所需连线数目。但该接线方式同时也给阵列中所有电阻的测量带来了问题,阵列中相邻电阻对被测电阻的测量产生影响,使得该电阻测量难以准确。为消除相邻电阻对被测电阻的影响,通常需采用运算放大器虚地隔离电流电压转换法进行测量[9],该类方法需要在每根测试输出线加上运算放大器以实现虚地隔离,对运放数将大大增加。
反馈隔离驱动测量电路采用了反馈隔离驱动技术进行虚拟隔离被测电阻,具体如下:主控制器控制阵列温度触觉传感装置的工作方式,控制行列多路开关中每一个的断开与闭合,对阵列中每一个温敏电阻扫描测量,控制自身的A/D进行模拟数字转换。阵列中温度传感器检测各自所处位置的温度,将温度变化转换为相应电阻变化。
如图1所示,根据当前被测电阻在阵列中所处的位置,主控制控制列多路开关选择被测电阻相应列与所要加载测试电压VI相连,忽略列多路开关的导通电阻,此时该列电压与所加载测试电压相等,而其它列X与反馈电压VF相连,这些列上的电压值与VF相等。而后主控制控制行多路开关选择被测电阻相应行Y与分压电阻相连,其它行也与反馈电压VF相连通,忽略行多路开关的导通电阻,这些行上的电压值也与VF相等。因此除被测电阻所处的行线、列线以外的行线和列线的电压都为VF。而测试电压VI通过被测电阻RXY连接到分压采样电阻RS到信号地,在被测电阻和分压采样电阻连接处的电压符合式(1)。将该电压通过运放跟随并进行电流放大后输出为反馈电压VF,VF与在VXY数值相等,但相互隔离,VF通过反馈电压线传输给列多路开关和行多路开关进行反馈。
所有行线上电压都为VF,所有非当前电阻所在列线上的电压也为VF,因此这些列的电阻上都没有电流通过,被虚拟隔离。我们仅需要考察当前被测电阻所在列的M个电阻。这M个电阻中的当前被测电阻上通过的电流为

如前所描述,其他剩余电阻上通过的电流都与当前行上的电阻无关,VI,RS是常数,VXY仅与RXY相关。电路自动反馈最后将被测电阻RXY从阵列中隔离出来,其温度所对应的VXY与阵列上的其他温敏电阻阻值无关。VXY经过跟随放大输出到主控制器的高速模拟数字转换端口转换为数字信号,完成RXY的测量,而后通过主控制器选择下一个热敏电阻进行逐一扫描测量,最终完成阵列中所有热敏电阻的测量。对该扫描驱动电路的进行了读出速度测试,可达1 ksps,结果基本能保证准确,受硬件条件限制,更高的扫描速度对性能影响有待进一步改进电路验证。
需要注意的是:该隔离驱动反馈技术要求列多路开关和行多路开关的导通电阻阻值与被测电阻阻值和测量精度要求相比可忽略,文中所采用的多路开关器件导通电阻为8 Ω,而采用的温度传感器为10 kΩ的NTC温敏电阻,在相应温度点电阻值温敏系数至少为264 Ω/℃,因此该导通电阻可忽略。温度其反馈驱动电路的驱动能力足够驱动阵列中除被测电阻以外的电阻以实现虚拟隔离,同时反馈驱动电流导致的温敏电阻温升影响可忽略。
与现有技术相比,该隔离驱动反馈技术的特点在于:①采用阵列式温度传感结构,可对一定空间范围内温度分布及其变化进行传感;②阵列式温度触觉传感装置的温度场空间分辨率高,相邻点间距可优于2 mm;③采用交叉式阵列结构,与N×M个温度传感器的连线数目为N+M根,可大大减少温度传感器阵列检测所需连线数目;④采用反馈隔离驱动测量技术,可快速对阵列中的所有温度点的温度及其变化进行测量,每秒钟可扫描测量阵列中100个以上的温度点,相邻温度点交叉干扰小,测量精度高,抗噪声干扰能力强。
3 装置实现和实验结果
为验证所设计的阵列式温度感知装置的测温精度,将温度传感阵列和同型号单独的参比电阻置于恒温箱中,在从27℃到37℃多个温度点进行对比实验,结果如表1所示。由恒温对比实验结果可知,反馈隔离驱动测量方法具有较好的性能。

表1 恒温对比实验 单位:kΩ
为验证所设计的阵列式温度感知装置(如图3所示)功能,进行了温度触觉形状识别测试实验,结果如图4~图6所示。实验中人手为柔性,对温度传感阵列施加一定的接触力以确保两者间保持有较好的接触特性,若被测对象为刚性物体则需要将传感器阵列设计为柔性阵列,以确保温度传感器阵列与被测量点的良好接触。图中的平面坐标为热敏电阻传感器所对在的位置,纵坐标为AD的转换值减去基数后的值。图4为单个手指侧按在温度传感器阵列表面的温度传感结果。图5为四个手指按温度传感器阵列四个角的温度传感结果。图6为单个手指按温度传感器阵列中心的温度传感结果。
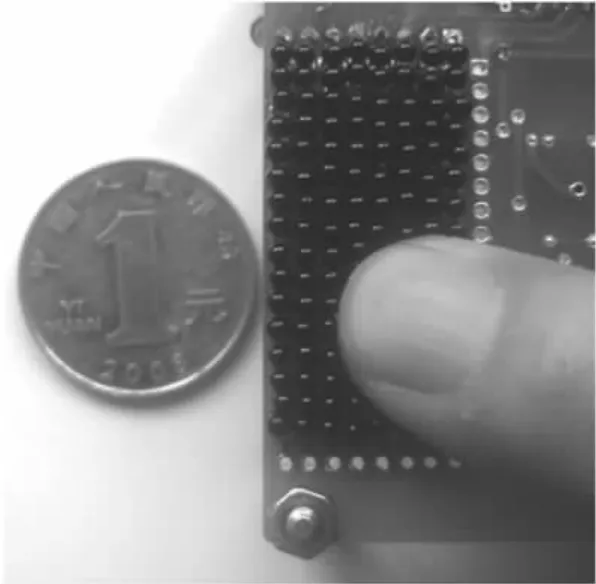
图3 阵列式微小尺寸温度传感装置实物照片

图4 单个手指侧按表面温度传感结果

图5 四个手指按四个角的温度传感结果

图6 单个手指按中心的温度传感结果
由于手与温度传感器间存在热传导,同时阵列中相邻温度传感器之间有热传导,在手指的边界处温度较低,而中心处温度较高。图4~图6的结果表明,阵列式温度感知装置能较好的温度传感能力,温度场空间分辨率较高。
4 结束语
阵列式温度传感装置可用于检测一定空间内分布的温度,然而小型化和相邻传感点的相互干扰消除是需要解决的难题,本文研制了一种阵列式小尺寸温度传感装置,采用阵列式微小热敏电阻进行温度传感,提出了反馈隔离驱动测量方法进行阵列电阻检测,并进行了温度触觉形状识别测试实验,实验结果表明,阵列式小尺寸温度传感装置性能良好,可减少阵列中相邻传感器的相互耦合和干扰。
[1]Ren Luo,Wen Hsiang Tsai.Object Recognition Using Tactile Image Array Sensors[C]//Proceedings 1986 IEEE International Conference on Robotics and Automation.San Francisco,CA,USA.1986:1248-1253.
[2]Caiti A,Canepa G,De Rossi D.Towards the Realization of an Artificial Tactile System:Fine-Form Discrimination by a Tensorial Tactile Sensor Array and Neural Inversion Algorithms[J].IEEE Transactions on Man and Cybernetics Systems.1995:933-946.
[3]Tanaka T,Makihira K,Aoyagi S.Recognition of Contact State of Arrayed Type Tactile Sensor by Using Neural Network[C]//IEEE International Conference on Information Acquisition.June 27-July 3,2005,Hong Kong and Macau,China.2005:37-42.
[4]Aoyagi S,Tanaka T,Minami M.Recognition of Contact State of Four Layers Arrayed Type Tactile Sensor by using Neural Network[C]//IEEE International Conference on Information Acquisition.August 20-23,2006,Weihai,China 2006:393-397.
[5]Arcelus A,Holtzman M,Veledar I.Contact Location Estimation from a Nonlinear Array of Pressure Sensors[C]//Proceedings 2008 IEEE Instrumentation and Measurement Technology Conference.Victoria,Vancouver Island,Canada,May 12-15,2008:1969-1973.
[6]Chih-Fan Hu,Hsin Yu Huang,Chih Chieh Wen.Implementation of a Flexible Silicon-Based Tactile Sensor Array[C]//IEEE sensors 2010 Conferences,November 1-4,2010 Waikoloa,HI,USA:1736-1739.
[7]庄燕子,蔡萍,周志锋,等.人体压力分布测量及其传感技术[J].传感技术学报,2005,18(2):313-317.
[8]叶学松,康锋,王平.基于心音传感阵列ICA信号处理的冠心病诊断的研究[J].传感技术学报,2003,16(1):16-20.
[9]Kane B J,Cutkosky M R,Kovacs G T A.A Traction Stress Sensor Array for Use in High-Resolution Robotic Tactile Imaging[J].Journal of Micro electro mechanical Systems,2000:425-434.
[10]Franco Castelli.An Integrated Tactile-Thermal Robot Sensor With Capacitive Tactile Array[J].IEEE Transactions on industry applications,2002,38(1):85-90.
[11]Li Ping,Wen Yumei.An Arbitrarily Distributed Tactile Sensor Array Using Piezoelectric Resonator[C]//Instrumentation and Measurement Technology Conference.Brussels,Belgium,June 4-6,1996:502-505.
[12]Takao H,Sawada K,Ishida M.Multifunctional Smart Tactile-Image Sensor with Integrated Arrays of Strain and Temperature Sensors on Single Air-Pressurized Silicon Diaphragm[C]//Digest of Technical papers of Transducers’05.June 5-9,Seoul Korea,2005:45-48.
[13]Takao H,Sawada K,Ishida M.Monolithic Silicon Smart Tactile Image Sensor with Integrated Strain Sensor Array on Pneumatically Swollen Single-Diaphragm Structure[J].IEEE Transactions on E-lectron Devices,2006:1250-1259.
[14]Chia Hsien Lin,Erickson T W,Fishel J A.Signal Processing and Fabrication of a Biomimetic Tactile Sensor Array with Thermal,Force and Microvibration Modalities[C]//2009 IEEE International Conference on Robotics and Biomimetics(ROBIO).December 19-23,2009,Guilin,China:129-134.
[15]Nagakubo A,Alirezaei H,Kuniyoshi Y.A Deformable and Deformation Sensitive Tactile Distribution Sensor[C]//IEEE International Conference on Robotics and Biomimetics.December 15-18,2007,Sanya,China.2007:1301-1308.
[16]Yang Y J,Cheng M Y,Shih S C,et al.Fan.A 32×32 Temperature and Tactile Sensing Array Using PI-Copper Films[J].International Journal of Advanced Manufacturing Technology,2010,46:945-956.
[17]Ohka M,Mitsuya Y,Hattori K.Data Conversion Capability of Optical Tactile Sensor Featuring an Array of Pyramidal Projections[C]//Multisensor Fusion and Integration for Intelligent Systems.8-11 Dec.Washington,DC,USA 1996:573-580.