利用多源运动信息的下肢假肢多模式多步态识别研究*
2011-10-20高云园罗志增佘青山
高云园,孟 明,罗志增,佘青山
(杭州电子科技大学自动化学院智能控制与机器人研究所,杭州 310018)
佩戴假肢是截肢者康复的重要方式,膝上下肢假肢适用于缺失膝关节的大腿截肢者,相比于传统机械式假肢,智能膝上假肢由于可以利用患者下肢动作时的信息实时控制假肢,目前越来越受到重视。人体下肢运动过程变化复杂,除了行走这一基本运动模式外,常见的下肢运动还包括上下台阶、起坐等多种模式。要使智能假肢具有对各种运动模式的适应能力,多模式识别算法是非常关键的。另一方面,下肢在进行多模式运动时,伴随着髋关节、膝关节和踝关节的协调运动,可以表示为一系列的状态变化,因此,为了更好的对智能假肢进行分析和控制,多模式下的步态识别也是必要的。有效的下肢假肢多模式多步态识别不仅可以为开发智能假肢解决关键的技术难题,对下肢受损患者的康复评价也有很好的参考价值。
在现有的智能膝上假肢中,主要通过采集假肢腿部与膝关节的角度和角速度[1-2]、足底压力[3]、踝关节处力[4]等这些运动力学信息来获取下肢姿态、状态等运动参数,再采用有限状态自动机[5]、匹配预设曲线[6]等方法进行运动模式识别和控制。除了以上运动学信息外,肌电信号在运动医学、康复医疗等研究领域也经常作为一种重要的运动生物力学信息源[7]。利用肌电信号可以在残疾人意图进行动作或无法完整动作时,获取动作意愿,这是传统方法中仅采集姿态、速度等运动学信息无法达到的。目前,肌电假肢的研究主要集中在肌电假手上,利用肌电信号对上肢的多运动模式进行识别和控制[8-9]。而下肢的运动模式涉及的肌肉更多,增加了下肢假肢肌电信号获取和处理的难度。有些学者利用肌电信号实现对下肢残肢动作的分析和识别[10-11]。Jin等利用多组下肢肌电信号对快慢速、上下楼梯等路况进行辨识[12]。研究表明肌电信号体现了患者自主下肢运动控制的预测性[13],下肢姿态、地面接触状态和运动速度等运动信息是对下肢假肢动作状态的确认,两类信号从不同角度体现了下肢运动状态,为下肢假肢的智能控制提供了重要信息。
本文针对人体下肢的行走、上下台阶、起坐等多种日常运动模式,通过对肌电信号、肢体姿态与足底压力等多源运动信息的获取和处理,分析不同运动状态与各运动力学量之间的关系,实现下肢假肢的多模式多步态识别。
1 多源运动信息获取系统
人体下肢运动是两侧腿共同协调进行的,从多种运动模式和步态识别的角度出发,本文拾取大腿上的多路肌电信号、大小腿姿态信号和足底压力信号,综合地获取下肢的多源运动信息,构建下肢运动信息获取系统。
1.1 表面肌电信号
肌电信号(EMG)是一种伴随肌肉活动的生物电信号,蕴涵了肌肉活动的各种信息。为了获取有效肢体运动信息,首先要选择适当的肌肉,作为肌电拾取电极的粘贴位置。通过大量实验,选用了股内侧肌、半腱肌、阔筋膜张肌与长收肌这四块肌肉。这些肌肉分布在大腿的不同区域,在位置和信号区分度上都具有典型性。课题组采用安全、非侵入肌肉的皮肤表面电极来拾取表面肌电信号,选用由Noraxon公司研制的MyoTrace 400肌电信号采集仪来拾取信号,该仪器可以同时采集四路表面肌电信号。
1.2 足底压力传感器
足底与地面的接触状态以及其相互作用力是描述下肢运动状态的重要信息。课题组选择柔软的压阻敏感材料制作足底压力传感器,如图1所示。为了进行运动状态的有效分析,我们在足跟和足趾区域分别布置了三个力传感器,自行研发的压力鞋如图2所示,能测出人体运动时足跟和足趾区域的压力变化。

图1 压阻薄膜传感器的外形

图2 安装薄膜压力传感器的压力鞋
1.3 下肢姿态测量
课题组选择大腿、小腿的倾角以及膝关节屈伸角度,作为下肢运动状态的重要参数。选用瑞士XSens公司生产的Mtx姿态跟踪仪作为倾角传感器,通过在大腿和小腿上分别放置Mtx姿态跟踪仪来实现对大腿、小腿与地面的倾斜度的测量,进而推算膝关节角度信息。安装位置如图3所示。

图3 下肢姿态和膝关节角度测量
2 下肢假肢多模式多步态识别方法
由于下肢表面肌电信号在识别下肢运动模式时有优势,并对模式间的变化带有一定的预测性,足底压力和腿部角度信息及其变化可以方便的识别运动模式下的具体步态,考虑到同步识别多模式多步态的难度较大、准确性不高,本文针对常见的几种运动模式,利用多源运动信息的不同特点,先利用下肢表面肌电信号识别下肢假肢的运动模式,再根据足底压力和腿部角度信息对运动模式中的不同步态进行分析,从而实现下肢假肢的多模式多步态识别。
2.1 多模式识别
隐马尔可夫模型HMM(Hidden Markov Model,HMM)是一种广泛应用的时序变化性信号统计模型,可以很好地描述动态过程和适应动态过程中的变化。由于肌电信号与运动状态具有HMM中观察值和隐含状态的特性,因此本文利用HMM对下肢肌电信号进行多模式识别。
(1)HMM基本理论
HMM是一个二重随机过程模型,其中一个是Markov链,它描述了状态间的统计对应关系;另一个则描述了状态和观察值间的统计对应关系。其中状态间转移的随机过程是隐含的,可观察到的是各状态产生的观察值,因此称为“隐”马尔可夫模型。图4体现了Markov链的状态转移和状态与观察值之间的关系。
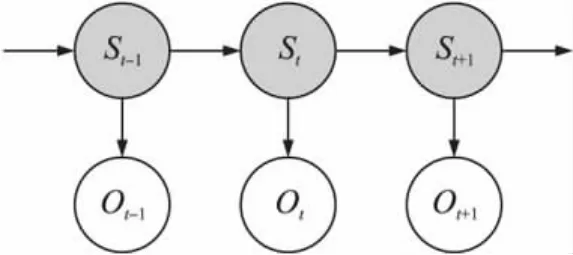
图4 HMM Markov链与观察值序列
(2)特征提取
小波包分解利用小波分解滤波器在各个尺度上对每个子带进行再分解,以二叉树方式将信号分解为等频宽带的子空间。小波包变换在信号处理中得到了广泛的应用。
设s(t)是一个有限能量信号,对信号s(t)进行w层分解后,得到2w个子空间,其中第n(n=1,2,…,2w)个子空间的信号可由以下公式重构

其中ψj,k(t)是尺度因子为j,平移因子为k的小波函数,Dj,nk是小波系数。由于小波函数是相互正交的,所以,该子空间重构信号的能量表示为:

将信号进行归一化处理,可以得到第n个子频带空间信号能量在整个信号能量中的概率分布为:

该能量分布概率也称为相对小波包能量,它反映了信号在各频带中的能量分布情况。本文以此作为下肢肌电信号的特征。
(3)多模式HMM建立与识别
人体下肢运动是一个周期重复的运动,可细分为多个状态;同时,肌电信号具有人体神经肌肉运动所固有的随机性,一个动作不同人或不同时刻做产生的信号都会变化。因此,HMM这种时序变化性信号处理概率模型,非常适合于对下肢运动信号的描述。针对不同的运动模式,我们建立了多个运动模式HMM,在每个HMM中设定不同的状态过程来描述一个运动周期,其结构为无跳转左至右型,如图5所示,用5个状态构成行走模式HMM结构。

图5 5状态行走模式HMM结构
针对下肢运动中,每种模式的各个状态时间所占比例变化比较小的特点,本论文采用一种简化改进的Baum-Welch算法来估计HMM参数。由于各状态时间比例变化小,表示HMM中各状态间的转移概率基本不变,于是采用各个状态的特征个数来计算转移概率

其中Xij为观察序列中状态i转移到状态j的次数。
观察概率密度函数的参数采用迭代EM算法来重估。在利用HMM进行识别时,对当前的数据段提取特征,输入到每个运动模式对应的已训练好的HMM中,结合前一时刻各HMM的输出概率,由Viterbi算法计算当前的HMM输出概率,输出概率值最大的模型所对应的运动模式就是运动模式识别结果。
2.2 步态识别
人体下肢的动作包含多种运动模式,运动模式还可以细分为一系列的状态变化,如支撑、摆动,因此,为便于智能下肢假肢的分析和控制,在模式分类的基础上,还需要对每个运动模式下的步态进行分析。
以行走为例,一个完整的循环周期称为一个跨步。如图6所示,以右腿作为参考,本文将行走模式细分为支撑前期、支撑中期、支撑后期、摆动前期和摆动后期这5个步态。类似的,人体上、下台阶模式划分为抬腿和着地两个状态,站起和坐下则划分为开始、中期和完成三个状态。
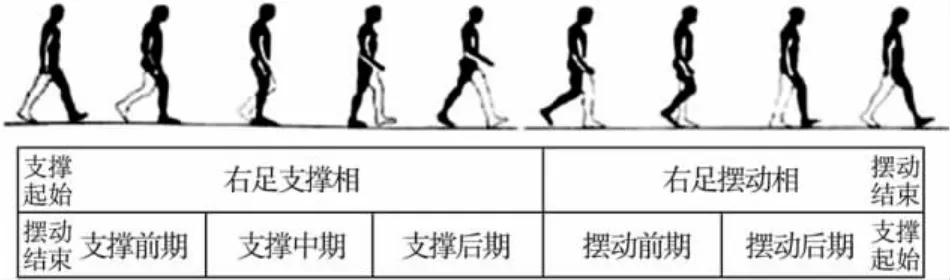
图6 行走时一个步态周期内的步相变化过程
(1)特征提取
对人体行走时大小腿和膝关节的角度信息进行分析。如图7所示,角度的变化有很好的区分性和规律性,可以作为步态识别的重要信息。因此选择大腿、小腿和膝关节的角度作为腿部姿态特征。

图7 腿部角度信号与步态状态划分
图8为行走时连续四个步态周期内所采集的足底压力,其中由于穿戴假肢导致的重心偏移,足底前内侧与地面接触减少,其压力信号出现时间变短,但内侧足底压力正常,不影响状态的识别。

图8 行走时足底压力信号
针对足底压力信号的特点,利用阈值方法对信号进行分析,通过实验和数据分析,设阈值Up为0.8 V。令当前足底压力信号为U(i),则经阈值处理后该信号的特征值U'(i)为:

(2)步态识别
大小腿、膝关节角度和足底压力信息在运动周期中体现出很好的确定性和规律性,因此在步态识别中采用模糊分类对不同步态进行划分。先对下肢运动信息在不同运动模式不同步态下的模糊规则进行研究,根据经验和实验结果我们得到如下结论,如表1所示是下肢在行走、上下楼梯、起坐模式下大小腿、膝关节角度和足底压力信号的变化规则。基于表1的模糊规则,实现下肢运动步态的识别。

表1 下肢运动信息的变化规则

起坐模式下运动信息变化规则起坐模式 大、小腿角度信息 大、小腿角度信息下的步态(站起模式)(坐下模式)开始 大腿角度下降 大腿角度增大到一定阈值 到一定阈值中期 大、小腿加速度 大、小腿加速度信号交叉 信号交叉完成 大腿角度下降 大腿角度增大到一定阈值 到一定阈值
3 实验与分析
为了验证方法的有效性,本文采用健康测试者佩戴智能假肢样机的方式,进行了行走、上下阶梯、起立、坐下等多种下肢假肢运动实验。如图9所示,假肢运动实验分别在专门的步行平台和阶梯平台上进行。

图9 智能假肢样机与佩戴实验
肌电信号采集频率是1 kHz,由于从肌肉收缩到假肢执行相应动作之间的延迟时间一般为200 ms~300 ms[14],肌电信号数据的分割长度取为 256,采用滑动窗口的方式,每次滑动128个数据。腿部角度信号和足底压力信号采样频率是50 Hz。
行走模式中,步速约为3 km/h,上、下阶梯模式分别采用健侧腿先上带动假肢跟随和假肢先下健侧腿跟随的方式连续上、下三级阶梯,站起和坐下模式是由站立开始坐在凳子上,然后再站起来。实验结果如表2所示,其中多模式分类准确率实现100%,步态识别的准确率均达到95%以上。由实验结果可见,步行模式的步态识别率还不能达到100%。主要是由于行走模式的步态划分比较复杂,识别错误主要发生在步态转移的时刻。图10是在行走、下上楼梯和起坐模式下的步态识别结果,表明本文的方法可以准确的对下肢假肢多模式运动进行步态状态识别。

表2 下肢多种运动模式下的步态识别结果
将本文多种运动信息融合的识别结果与直接利用肌电信号的识别结果[15]进行比较,肌电信号的多模式多步态的平均识别率是91.85%,本文基于多源运动信息的多模式多步态识别结果与之相比有更高的准确性和可靠性。
4 结论
本文利用下肢多源运动信息,根据信号不同的特点,采用了先分模式后分步态的策略,实现了下肢假肢不同模式不同步态的识别。下肢多模式识别准确率达100%,上下楼梯和起坐模式下的步态识别率能达到100%,步行模式的步态识别率也在95%以上。有效的多模式多步态识别方法可以为智能膝上假肢的开发和应用提供重要的支持。
[1]Milica Djuric.Automatic Recognition of Gait Phases from Accelerations of Leg Segments[C]//9th Symposium on Neural Network Applications in Electrical Engineering,25 - 27 Sept.2008:121-124.
[2]Jasiewicz J M,Allum J H J,Middleton J W,et al.Gait Event Detection Using Linear Accelerometers or Angular Velocity Transducers in Able-Bodied and Spinal-Cord Injured Individuals[J].Gait& Posture,2006,24(4):502-509.
[3]王岚,张今瑜,王劲松.人体步态相位检测实验研究[J].传感器与微系统,2006,25(5):42-44.
[4]金德闻,王人成.人工智能假肢[J].中国临床康复,2002,20(6):2994-2995.
[5]Zlatnik D,Steiner B,Schweitzer G.Finite-State Control of a Trans-Femoral(TF)Prosthesis[J].IEEE Transactions on Control Systems Technology,2002,10(3):408-420.
[6]Carlson J D,Matthis W,Toscano J R.Smart Prosthetics Based on Magnetorheological Fluids[C]//Proceedings of SPIE,2001,4332:308-316.
[7]Scott R N,Parker P A.Myoelectric Prostheses:State of the Art[J].Journal of Medical Engineering & Technology,1988,12(4):143-151.
[8]罗志增,赵鹏飞.非线性PCA在表面肌电信号特征提取中的应用[J].传感技术学报,2007,20(10):2164-2168.
[9]高剑,罗志增.支持向量机在肌电信号模式识别中的应用[J].传感技术学报,2007,20(2):336-369.
[10]王喜太,王强,张晓玉,等.基于肌电传感器的下肢残肢康复训练模式识别的研究[J].中国康复理论与实践,2009,15(1):90-92.
[11]He Huang,Todd A Kuiken,Robert D Lipschutz.A Strategy for Identifying Locomotion Modes Using Surface Electromyography[J].IEEE Transactions on Biomedical Engineering,2009,56(1):1.
[12]Jin D,Yang J,Zhang R,et al.Terrain Identification for Prosthetic Knees Based on Electromyographic Signal Features[J].Tsinghua Science and Technology,2006,11(1):74-79.
[13]郭欣,杨鹏,王志宇.肌电信号控制下肢假肢的机理[J].中南工业大学学报(自然科学版),2003,34(s2):31-33.
[14]OSKOEI M A,HU H S.Support Vector Machine-Based Classification Scheme for Myoelectric Control Applied to Upper Limb[J].IEEE Transactions on Biomedical Engineering,2008,55(8):1956-1965.
[15]Meng M,She Q S,Gao Y Y,et al.EMG Signals Based Gait Phases Recognition Using Hidden Markov Models[C]//Proceeding of the 2010 IEEE International Conference on Information and Automation,2010:852-856.
