地磁相对记录用低噪声磁通门磁力仪*
2011-10-19王晓美滕云田范晓勇马洁美
王晓美,滕云田,王 晨,范晓勇,马洁美
(中国地震局地球物理研究所,北京 100081)
地磁相对记录的任务是连续记录因电离层中的电流体系引起的地磁场变化。地球短周期变化磁场来源于高空电离层和磁层的各种电流体系[1]。各种地磁观测手段所观测到的地磁场变化包括了上至太阳活动、星际空间以及地球磁层和电离层的活动,下至地壳构造、地震活动、地球深部导电特征乃至地核变化等的各种丰富信息。地磁观测数据,是研究空间天气(例如磁暴)、地球内部动力学、地磁场起源、地磁场的倒转等用地磁方法地震预报的基础[2-3]。所以,世界各国几乎都拥有自己的地磁观测台站,特别是一些发达国家对地磁场变化的观测更是形成了完善的台站观测网。为了保证地磁资料的观测质量,不仅要有高精度的地磁仪器,而且要有合理的观测方法。国际地磁观测台网(INTERMAGNET,International Real-time Magnetic Observatory Network)是一个旨在推动全球地磁观测进步的组织,指导实施全球的地磁观测任务,推荐使用磁通门磁力仪为其相对记录设备[4-5]。
磁通门磁力仪是上世纪20年代兴起的弱磁场测量设备,并因其灵敏度高、频带宽、易于实现数字化等优点,目前已经成为地磁相对记录的典型设备,广泛应用于地磁观测台站,测量地磁场水平、垂直和偏角三个方向的相对变化。本文详细阐述了磁通门传感器的基本原理、三轴磁通门探头的结构和信号处理电路;通过在零磁空间的性能测试和在观测台站的对比观测,对研制仪器进行整机性能测试。
1 磁通门传感器设计
1.1 磁通门传感器的基本原理
磁通门传感器在交变激励信号的磁化作用下,磁芯的导磁特性发生周期性的饱和与非饱和变化,从而使缠绕在磁芯上的感应线圈感应输出与外磁场成正比的调制信号,通过特定的检测装置,提取被测外磁场信息;其基本原理是基于磁芯材料的非线性磁化效应[6-7]。
最简单的单芯磁通门传感器由一个线圈缠绕磁芯组成,在激励电流Iex的作用下,产生激励磁场He与磁芯轴向平行,与外磁场(被测磁场)Ho的合成磁场为H=He+Ho。设磁芯导磁系数为μ,截面面积为s,线圈匝数为n,则线圈两端将产生感应电压为[8-9]:

式中,Vs为感应输出电压,Heo为正旋交变场幅值,ω为激励信号角频率。从式(1)可知,感应输出电压含有激励信号的基波分量、二次谐波分量和三次谐波分量,但只有二次谐波与外磁场Ho成正比。为了抑制该基波信号,出现了各种实用的传感器形状。环形磁芯传感器因其激励场在左右两对称的磁芯中大小相等、方向相反,使其感应电压的基波分量互相抵消。设在正弦交变电流作用下的激励磁场为H(t)=Heosinωt,磁芯的磁化特性曲线为近似三折线,即忽略磁滞效应,并假定磁芯在未饱和前导磁系数是常数,而饱和时的导磁系数为1时,环形芯传感器二次谐波输出电压为:

式中μa为磁芯的视导磁系数,T为激励信号周期,Td为高导区时间。
1.2 三轴磁通门探头的结构设计
为了获得较低的噪声和温度系数,环形磁芯传感器由磁芯、激励线圈、感应线圈和补偿线圈组成。作为敏感元件的环型磁芯是在高塑性、较高持久蠕变强度的合金骨架上缠绕高导磁系数的坡莫合金薄带,然后经高温退磁处理后形成。如图1所示,激励线圈直接缠绕在环形骨架上,感应线圈和补偿线圈缠绕在低温度系数的玻璃钢骨架上。

图1 环形磁芯传感器示意图
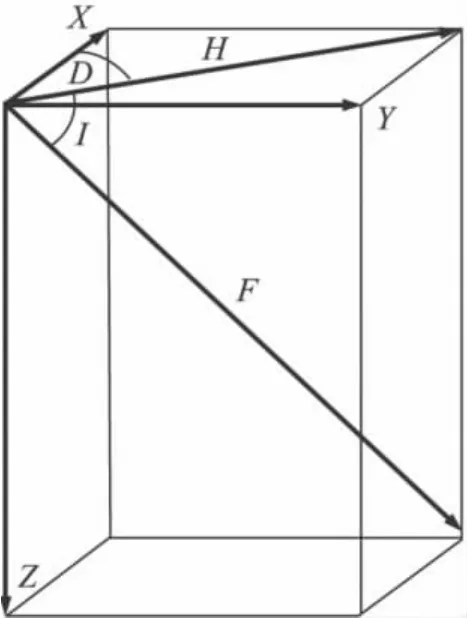
图2 地磁场分量的定义和表示符号
地磁场是一个矢量场,各分量的定义和表示符号如图2所示[10]。地磁场矢量的模称作总强度F,始终取正值。地磁场矢量在水平面内的投影是水平强度(水平分量)H,向北为正。地磁场矢量在垂直面内的投影是垂直强度(垂直分量)Z,向下为正;包含H的垂直平面称作磁子午面,垂直与H的平面称作卯酉圈;H在地理北方向的投影是地磁场北向分量X,向北为正;H在地理东方向的投影是地磁场东向分量Y,向东为正;磁子午面与真子午面的夹角、即H与X的夹角是磁偏角D,向东为正;地磁场矢量与水平面的夹角是磁倾角I,向下为正。
三轴磁通门探头如图3所示,由3个正交的环形磁芯传感器构成,连续记录磁偏角D、水平强度H和垂直强度Z随时间的相对变化量。仪器架设中按照地磁坐标对记录仪器的探头进行定向,从而获得地磁场dH、dD、dZ,并且该方式具有安装简单方便的优点。为了减小各分量之间的横向效应,探头骨架在设计和机械制造中,要求较高的加工精度以避免测量误差。地磁相对观测要求观测仪器具有较高的长期稳定性,探头底盘设有水平调节螺母,用于调节探头水平;水平锁紧螺母,用于探头水平位置锁紧。水平调节完毕后,将该螺母逆时针旋转至紧靠探头底座底部,使底脚不能随意调节,并增加底脚对探头底座的支撑面积,锁定支撑点水平位置;底脚垫圈,支撑探头底脚。将探头底脚锥形头置于底脚垫圈的圆形凹槽内,增加探头水平调节时底脚转动灵活性,并扩大探头底脚与观测墩之间的接触面积,防止探头轻易滑动。整体探头的物理尺寸为Ø18 cm×10 cm。
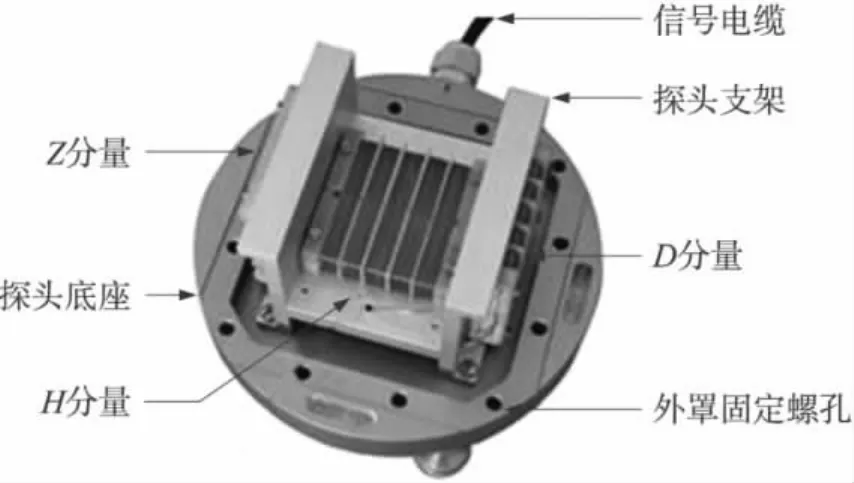
图3 三轴磁通门探头实物图
2 信号处理电路设计
2.1 模拟信号处理电路
磁通门探头在激励信号作用下,感应线圈输出包含地磁场H、Z、D三分量变化信息的激励信号二次谐波,交变信号经模拟信号处理电路的前置选频放大、鉴相、积分、深度负反馈网络和低通滤波等处理后,形成正比于对应磁场三个分量的准直流电压信号。为了提高磁通门探头检测地磁场微弱变化场的灵敏度和分辨力,给传感器的补偿线圈施加一定的电流值,产生一个大小相同、方向相反的补偿磁场,抵消绝大部分的外界自然磁场,从而使探头工作在近零场状态。模拟信号处理电路原理框图如图4所示。
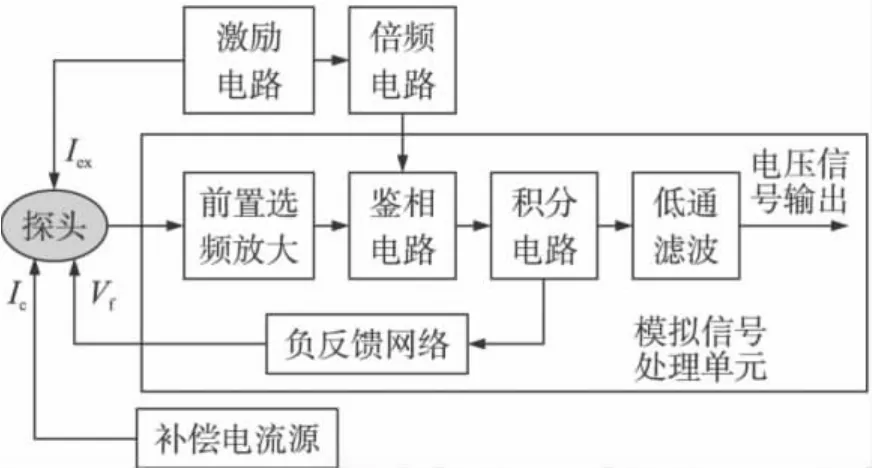
图4 模拟信号处理电路原理框图
2.2 磁场补偿电路设计
模拟电压信号经过24位信号调理模数A/D转换芯片转变为数字码输送给上位机CPU。在CPU首先获得外界自然场数值之后,计算数模D/A转换所需要的代码,然后控制D/A转换电路产生与地磁场大小最接近的补偿值,经反馈电路作用于传感器的反馈线圈形成各地磁分量的补偿磁场,从而抵消绝大部分自然磁场[11-13]。补偿电路原理框图如图5所示,基准源选用温漂1×10-6/℃、噪声1.5 mV p-p的 MAX6325基准电压芯片产生2.5 V的参考电压,保证高精度数据采集系统的转换精度和分辨力;D/A转换芯片采用串行输入、电压输出的16 bit单极性MAX5441,由于采用未缓冲DAC输出,因此具有特别低的120 μA电源电流和极小的1 LSB失调误差;准恒流源输出电路采用低失调电压和温漂的OPA2277运输放大器和精密电阻。

图5 补偿电路原理框图
磁通门磁力仪的温度特性主要由传感器线圈受外界温度变化而引起的线圈常数的改变。为了提高仪器对外界温度变化的抗干扰性、降低温度系数,传感器增加补偿线圈。磁场补偿电路如图6所示,电路中的准恒流源与补偿线圈常数构成逆向反应,从而获得恒定的补偿磁场。补偿线圈的匝数、阻值等因素决定了准恒流源电阻 R1A、R2A、R3A、R4A、R5A取值范围。
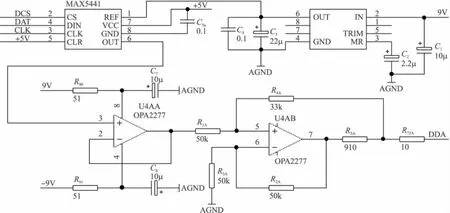
图6 磁场补偿电路
3 整机性能测试
3.1 性能测试
磁通门磁力仪的性能测试较为特殊,因其为测量地磁场变化的仪器,在自身性能测试的过程中,不能受到外界磁场的干扰,所以磁通门探头应置于磁屏蔽装置内[13-15]。检定系统是在磁感应强度值近似为0的零磁空间内放置能产生均匀磁场的线圈,并使线圈通过稳定的电流,从而在线圈中心区域内产生稳定、均匀的直流磁场,使用标准质子磁力仪测定该磁场的磁感应强度的值,将该测定的值作为约定真值。在该约定真值下,使用替代法对被检定的磁通门磁力仪进行检定。同时,通过使用标准质子磁力仪测定与通过标准线圈的电流对应的磁感应强度的值,可以计算标准线圈的线圈常数。设标准线圈的线圈常数为K,通过标准线圈的电流为I,则标准线圈中心的磁感应强度为:

将该磁感应强度值B作为约定真值,对磁通门磁力仪进行检定。
检定系统由磁屏蔽室、标准线圈、精密电流源、标准质子磁力仪和电流检测系统构成,电流检测系统包括一个标准电阻和一台高精度数字电压表。研制的磁通门磁力仪的测试结果见表1。
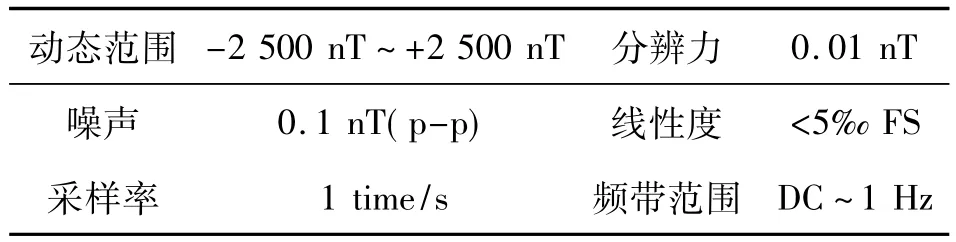
表1 磁通门磁力仪性能指标
3.2 对比观测
选择天津市地震局静海基准地磁台的相对记录室及绝对观测室作为仪器对比测试环境。测试中使用两套研制的磁通门磁力仪,一套安装在保温条件良好的相对记录室内,用作仪器一致性对比记录,仪器号记作GM4D;另一套安装在绝对观测室内,用作测试仪器的温度系数,仪器号记作GM4U。此外,还使用了静海地磁台上的GM3磁通门磁力仪和FHD-1质子矢量磁力仪。各地磁仪器连续观测96 h,图7~图9分别为4台观测仪器对地磁场D、H、Z分量的日变化对比观测曲线。
GM4D磁通门磁力仪与GM3磁通门磁力仪的D、H、Z三要素分钟值的差值平均值为-38.21'、540.52 nT、5.11 nT;标准偏差为 0.098 625'、0.434 111 nT、0.201 768 nT;相关系数为 0.999 694、0.999 261、0.999 828。GM4D磁通门磁力仪与FHD-1质子矢量磁力仪的D、H、Z三要素分钟值的差值平均值为-23.20'、29 394.21 nT、45 260.93 nT;标准偏差为0.125 071'、1.047 576 nT、0.876 478 nT;相关系数为0.996 475、0.992 708、0.989 124。
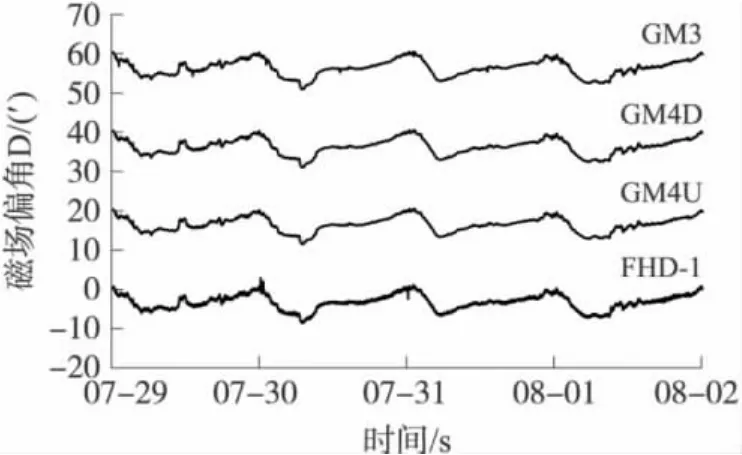
图7 D分量日变化形态曲线

图8 H分量日变化形态曲线

图9 Z分量日变化形态曲线
相对记录室内的最大年温差约4℃,最大日温差为0.03℃。为了做仪器的温度系数测试,绝对观测室内的测试温度可控制在5℃以上。用GM4U磁通门磁力仪与GM3、GM4D磁通门磁力仪及FHD-1质子矢量磁力仪之记录数据求温度相关系数,用记录仪记录数据测定GM4U之温度相关系数结果如表2所示。
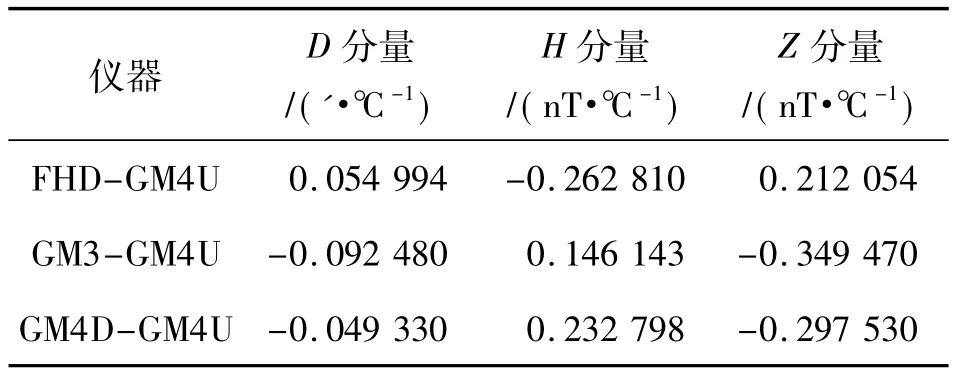
表2 GM4U与GM3、GM4D、FHD-1磁力仪的日变化数据的差值与观测室记录温度的相关系数
4 结论
详细阐述环形磁通门传感器的原理和结构,然后针对探头输出的模拟信号设计处理电路,并且采用D/A转换电路实现磁场的自动补偿。通过在零磁空间的性能测试和在观测台站的对比观测,验证了自主研发的磁通门磁力仪具有噪声低、灵敏度高、温度系数低等优势,目前已经广泛应用于地磁台站和野外流动地磁观测,并且经过几年的运行和数据处理,其噪声和稳定性方面与国外进口的仪器并无差别。现在噪声水平为峰峰值0.1nT,希望通过对探头及电路做进一步改进,使其提高一个数量级达到10pT级,并且拓展仪器高频响应,使其适合更宽范围的地磁变化场观测。
[1]徐文耀.地磁学发展史的启示[J].自然杂志,2006,28(6):349-352.
[2]李琪,李军辉,杨冬梅,等.地磁ULF前兆信息研究简述[J].地震地磁观测与研究,2008,29(6):170-176.
[3]冯志生,李琪,卢军,等.基于磁通门秒值数据的地震ULF磁场可靠信息提取研究[J].华南地震,2010,30(2):1-7.
[4]辛长江,李秋红.Intermagnet地磁台站简介[J].地震地磁观测与研究,2001,22(3):48-52.
[5]Jankowski J,Sucksdorff C.Guide for Magnetic Measurement and Observatory Practice[M].IAGA,Warsaw.1996.
[6]刘石,李宝清,童官军,等.一种平面四轴向磁通门传感器的设计[J].传感技术学报,2010,23(11):1565-1569.
[7]Henriksen J Pill,Merayo J M G,Nielsen O V,et al.Digital Detection and Feedback Fluxgate Magnetometer[J].Measurement Science and Technology,1996,(7):897-903.
[8]Yanowskiy B M.Earth Magnetism[M].Izd Lening.Univ,Leningrad,1978.
[9]Ripka P.Magnetic Sensors and Magnetometers[M].Artech House,2001.
[10]Wallace H C.Introduction to Geomagnetic Fields[M].Cambridge University Press,2003.
[11]胡星星,滕云田,谢凡,等.磁通门磁力仪背景磁场的自动补偿设计[J].仪器仪表学报,2010,31(4):956-960.
[12]李江,周勋.磁通门磁力仪自动补偿的实现[J].地震地磁观测与研究,2002,23(3):59-64.
[13]周勋,金海强,张奇.弱磁感应强度检定系统[C]//中国空间科学学会空间探测专业委员会第十九次学术会议论文集.2006.
[14]王晓美,滕云田,王喜珍,等.GM4型磁通门磁力仪性能检测方法[J].地震地磁观测与研究,2008,29(6):88-94.
[15]Auster H U,Fornacon K H,Georgescu E,et al.Calibration of Flux-Gate Magnetometers Using Relative Motion[J].Measurement Science and Technology,2002,(13)1124-1131.
