静电梳齿驱动结构的稳定性分析*
2011-10-19苑伟政常洪龙丁继亮谢建兵
张 峰,苑伟政,常洪龙,丁继亮,谢建兵
(西北工业大学陕西省微/纳米系统重点实验室,西安 710072)
在各种 MEMS 微驱动器中[1-3],静电梳齿驱动器[4-5]由于结构和原理简单,在微夹钳[6]、光开关[7]等微机电系统中得到广泛的应用。研究表明[8-14]:典型静电梳齿驱动结构可以实现的最大驱动位移主要受侧向不稳定性即侧向吸合的限制,而侧向不稳定性主要受梳齿间隙、梳齿交叠长度、支撑梁的纵/横向刚度比等因素的影响。
Moussa等[11]采用有限元软件ANSYS对典型静电梳齿驱动结构进行了数值模拟仿真分析,研究了梳齿间隙、梳齿厚度等参数对结构稳定性的影响。Zhou等[12]对典型静电梳齿驱动结构进行了理论分析,提出采用倾斜支撑梁的方法提高静电梳齿驱动结构的稳定性。Chen等[13]提出增大边缘梳齿宽度的方法提高静电梳齿驱动结的稳定性。刘恒等[14]提出通过改变静电梳齿结构高度来提高执行器分辨率和稳定性的方法。但是目前在针对典型静电梳齿驱动结构的稳定性研究中,尚未系统研究支撑梁结构参数对结构稳定性的影响。
本文以典型静电梳齿驱动结构为研究对象,建立稳定性分析模型,分析结构稳定性随支撑梁结构参数的变化关系。采用有限元仿真软件ANSYS进行结构性能仿真分析,并进行器件设计、加工和实验验证。为大位移静电梳齿驱动器设计提供参考,以促进该方法在静电梳齿驱动器设计中的推广应用。
1 静电梳齿结构的工作原理
典型静电梳齿驱动结构由固定梳齿、活动梳齿和弹性支撑梁结构组成,其结构模型如图1所示。
当固定梳齿、活动梳齿间施加驱动电压U时,梳齿结构中产生电场能E:
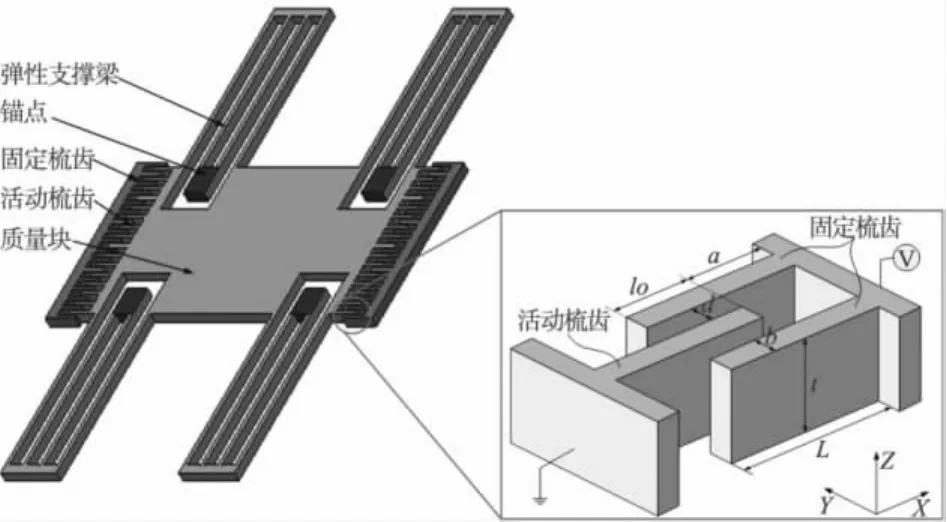
图1 典型静电梳齿驱动结构

忽略边缘效应和梳齿拐角效应时,X方向的静电驱动力:

项可忽略不计,则式(2)可简化为:

2 稳定性分析
建立如图2所示的侧向吸合分析模型,随着驱动电压继续增大,活动梳齿与固定梳齿之间将产生吸合现象,发生侧向吸合的最小电压,称为吸合电压。
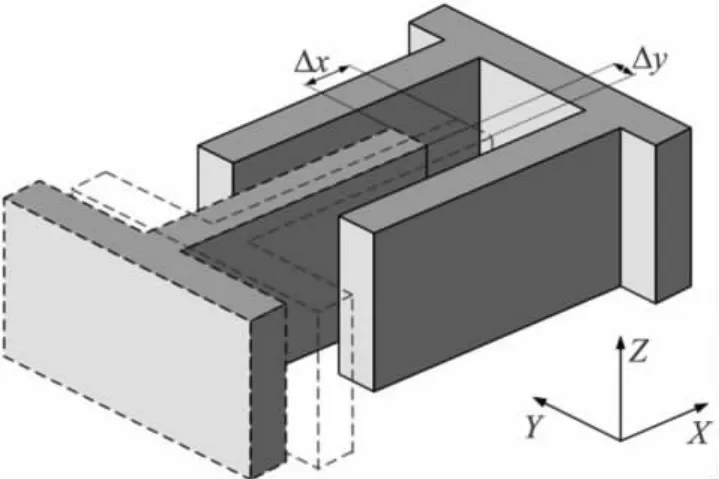
图2 侧向吸合分析模型
Y方向的静电力:

其中,Δx是活动梳齿在X方向的位移,Δy是活动梳齿偏离平衡位置的距离,l0是活动梳齿与固定梳齿的初始重叠长度。
“负”弹簧系数的定义[12]:

静电驱动力产生的驱动位移:

静电梳齿驱动结构稳定须满足的条件:

联立式(5)、式(6)、式(7),“负”刚度系数Ke可表示为:

则最大驱动位移:

吸合电压的理论值:

当在X方向产生驱动位移Δx时,Y方向的刚度Ky与“负”刚度系数Ke的比值Ky/Ke:

Ky/Ke反映了静电梳齿驱动结构的稳定性,Ky与Ke的交汇处Ky/Ke=1,即结构稳定的临界点,其对应的驱动位移即为静电梳齿驱动结构的最大驱动位移Δxmax。当驱动位移Δx小于结构稳定临界点对应的驱动位移 Δxmax时,Ky/Ke>1,即Ky大于Ke,结构稳定;当驱动位移Δx大于结构稳定临界点对应的驱动位移Δxmax时,Ky/Ke<1,即Ky小于Ke,结构失稳。Ky/Ke和最大驱动位移Δxmax与梳齿间隙d、初始交叠长度l0以及支撑梁结构的纵/横向刚度比Ky/Kx有关;梳齿间隙d越大,结构稳定性越好,但驱动电压也相应升高;Ky/Ke和最大驱动位移随着Ky/Kx变大而增大,随初始交叠长度l0的减小而增加。
3 实例分析与验证
3.1 结构设计
本文分析的静电梳齿驱动结构简图如图3所示,其中:图3(a)为静电梳齿驱动结构简图,图3(b)为静电梳齿驱动结构的支撑梁结构简图,其结构设计参数如表1所示。

图3 静电梳齿驱动结构
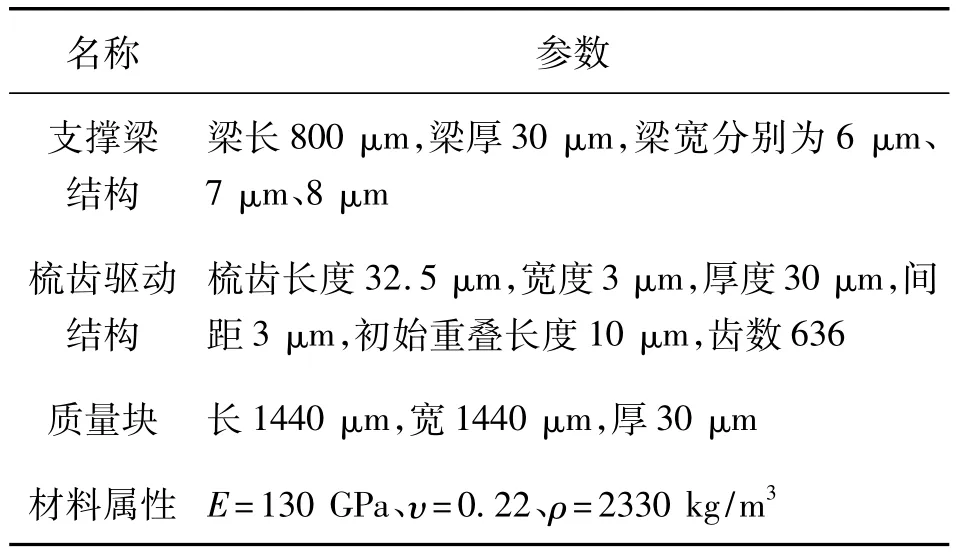
表1 静电梳齿驱动结构的设计参数
X 方向的刚度Kx[9]:

Y 方向的刚度Ky[9]:

当在X方向产生位移Δx时,Y方向的刚度Ky:

其中:E是杨氏模量,l是梁的长度,h是梁的厚度,w是梁的宽度,I是惯性矩,I=hw3/12。
联立式(12)、式(14),纵/横向刚度比K'y/Kx:

3.2 仿真分析
在图3所示的静电梳齿驱动结构的典型支撑结构中,设计了梁宽分别为 6 μm、7 μm 和 8 μm 的支撑梁,并进行了仿真分析。静电梳齿驱动结构的驱动位移随支撑梁结构的梁宽的增大而减小。支撑梁结构的横向刚度Kx随驱动位移的变化不明显,结构的稳定性主要体现在刚度Ky和Ke上。刚度Ke与支撑梁结构的梁宽无关,支撑梁结构的纵向刚度Ky随梁宽的增大而增大,随驱动位移的增加而迅速减小。
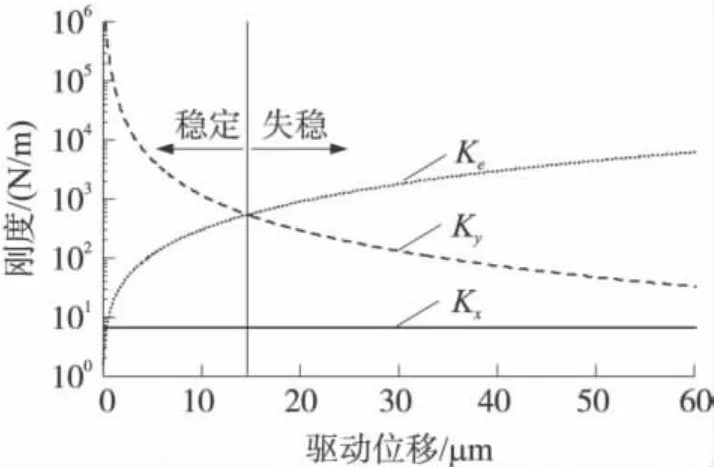
图 4 Kx、Ky、Ke的关系曲线
以梁宽为6 μm为例,支撑梁结构的刚度Kx、Ky和Ke的关系曲线如图4所示。Ky与Ke的交汇处Ky/Ke=1,为静电梳齿驱动结构稳定的临界点,对应的驱动位移即为结构的最大驱动位移。当驱动位移小于结构稳定临界点对应的驱动位移时,Ky/Ke>1,即Ky大于Ke,结构稳定;当驱动位移大于结构稳定临界点对应的驱动位移时,Ky/Ke<1,即Ky小于Ke,结构失稳。随着驱动位移的增大,Kx保持不变,Ke增大,Ky迅速减小,Ky/Ke迅速减小,即静电梳齿驱动结构的稳定性迅速下降。支撑梁结构的刚度Ky、Ke与梁宽的关系曲线如图5所示。
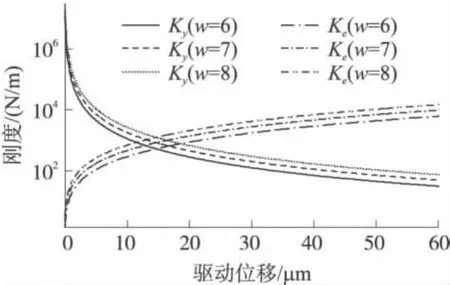
图5 刚度Ky、Ke与梁宽的关系曲线
3.3 器件加工与实验
本文设计了一种典型静电梳齿驱动结构,其结构设计参数如表1所示。经过光刻、ICP刻蚀、HF释放等工艺加工静电梳齿驱动器,工艺流程如图6所示。加工出不同梁宽的静电梳齿驱动器,如图7所示。采用直流电源(ADJ300)对驱动器连续加载电压,采用光学显微镜(Olympus BX51)观测驱动位移,采用数字万用表(Keithley 2100)测量吸合电压,仿真分析结果与测试结果比较如表2所示。
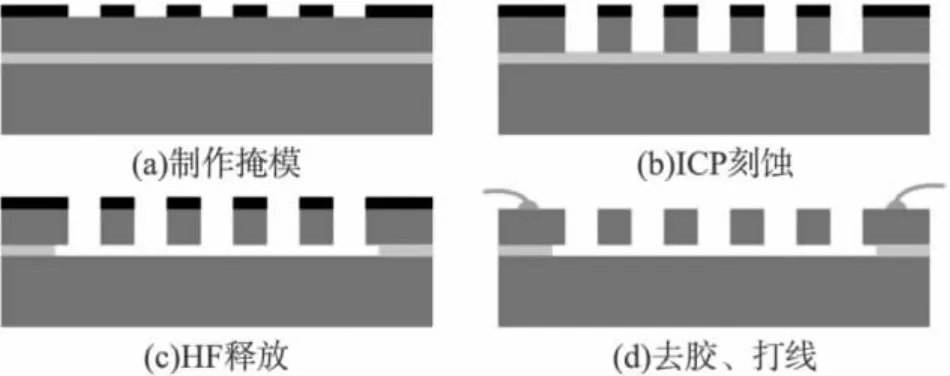
图6 工艺流程图
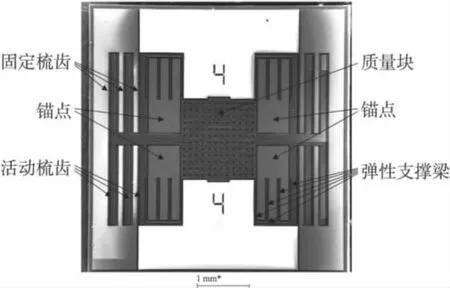
图7 本文设计加工的典型静电梳齿驱动器扫描电镜图
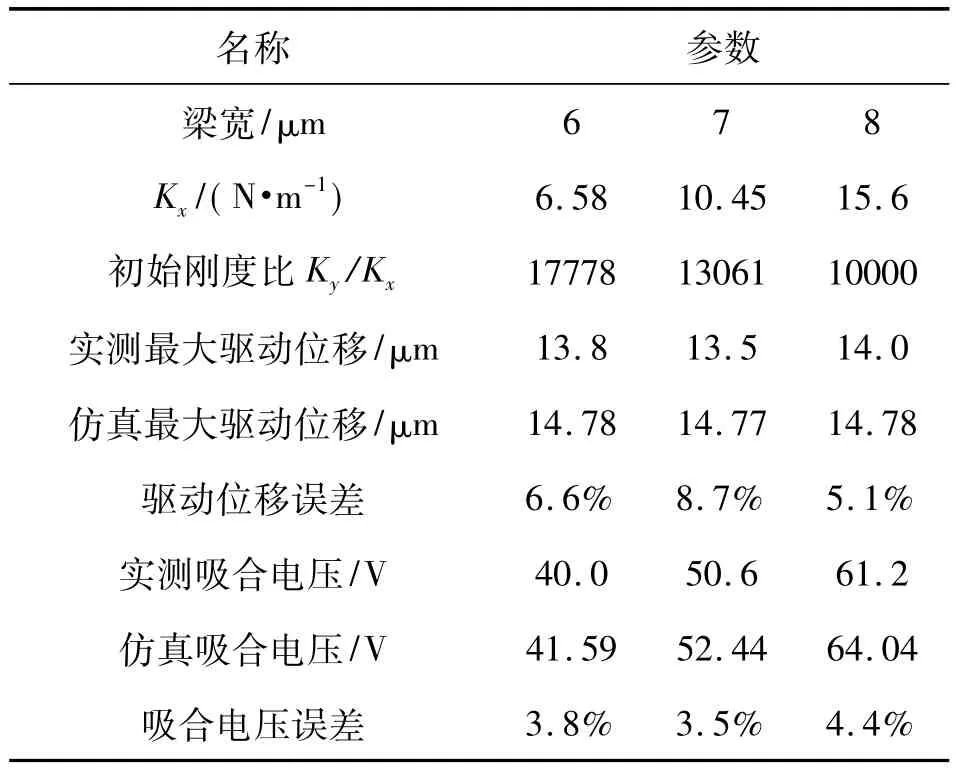
表2 仿真分析结果与测试结果比较
实验结果表明:支撑梁结构的刚度是影响静电梳齿驱动结构稳定性的重要因素。支撑梁的宽度对支撑梁结构的横向刚度Kx和纵向刚度Ky影响很大,随着梁宽的增大,刚度Kx增大,吸合电压增大,最大驱动位移不变。实验测试结果与仿真分析误差较小。
4 结论
本文对静电梳齿驱动结构的典型支撑结构建立了稳定性分析模型,进行了器件设计、加工和测试,并进行了仿真分析和实验验证,仿真分析和实验结果的结论吻合。
结果表明:支撑梁的宽度对结构的刚度影响很大,但与结构的稳定性和最大驱动位移无关;支撑梁的长度对结构的刚度影响较小,但对结构的稳定性影响很大。Ky/Kx是影响静电梳齿驱动结构稳定性的关键因素。Ky/Kx越大,静电梳齿驱动结构的稳定性就越好,最大驱动位移也越大。随着驱动位移的增大,Ky迅速减小,Ky/Kx也迅速减小,静电梳齿驱动结构的稳定性迅速下降。因此,在满足合适的Kx时,增大Ky可有效提高静电梳齿驱动结构的驱动位移和稳定性。
[1]Luginbuhl P,Racine G,Lerch P,et al.Piezoelectric cantilever beams actuated by PZT sol-gel thin film[J].Sensors and Actuators A,1996,54:530-535.
[2]Lerch P,Slimane C,Romanowicz B,et al.Modelization and characterization of asymmetrical thermal micro-actuators[J].Journal of Micromechanics and Microengineering,1996,6:134-137.
[3]Lagorce L,Brand O,Allen M.Magnetic microactuators based on polymer magnets[J].Journal of Microelectromechanical System,1999,8(1):2-9.
[4]Tang W C,Nguyen T C H,Howe R T.Laterally Driven Polysilicon Resonant Microstructures[J].Sensors and Actuators,1989,20:25-32.
[5]Tang W C.Electrostatic Comb Drive for Resonant Sensor and Actuator Applications[D].University of California,Berkeley,1990.
[6]Kim C J,Pisano A,Muller R S.Silicon-Processed Overhanging Microgripper[J].Journal of Microelectromechanical Systems,1992,1(1):31-36.
[7]Juan W H,Pang SW.High Aspect Ratio Si Vertical Micromirror Arrays for Optical Switching[J].Journal of Microelectromechanical Systems,1998,7(2):207-213.
[8]Hirano T,Furuhata T,Gabriel K,et al.Design,fabrication,and operation of submicron gap comb-drive microactuators[J].Journal of Microelectromechanical Systems,1992,1(1):52-59.
[9]Legtenberg R,Growenveld AW,Elwenspoek M.Comb Drive Actuators for Large Displacements[J].Journal of Micromechanics and Microengineering,1996,6:320-329.
[10]赵江铭,陈晓阳,刘武发,等.硅微梳状静电谐振器机械性能试验研究[J].传感技术学报,2008,21(3):428-430.
[11]Moussa W,Ahmed H,Badawy W,et al.Investigating the Reliability of Electrostatic Comb-drive actuators Utilized in Microfluidic and Space systems using Finite Element Analysis,Canadian Journal on Electrical and Computer Engineering,2002,27:195-200.
[12]Zhou G,Dowd P.Tilted Folded-Beam Suspension for Extending the Stable Travel Range of Comb-Drive Actuators[J].Journal of Micromechanics and Microengineering,2003,13:178-183.
[13]Chen Y C,Chang I C M,et al.On the Side Instability of Comb-Fingers in MEMS Electrostatic Devices[J].Sensors and Actuators A,2008,148:201-210.
[14]刘恒,苏伟,何晓平,等.静电梳齿执行器分辨率和稳定性分析[J].传感技术学报,2009,22(1):34-37.
