基于XC164的三相SPWM技术研究
2011-10-09王琪
王琪
(西安工业大学 电子信息工程学院,陕西 西安 710032)
PWM技术是利用半导体器件的导通与关断把直流电压变成电压脉冲列,并通过控制脉冲宽度或周期以达到改变电压的目的,从而使需要的输出电压在不同负载下或变化的输入电压下保持恒定。但是对于不同的功率器件,不同的负载环境以及不同的输入电压范围等,将会给PWM算法提出不同的要求。目前常用脉宽调制算法有方波PWM技术和正弦波 PWM (Sinusoidal Pulse Width Modulation,SPWM)技术。SPWM主要应用于有较高精度正弦波输出的逆变电源中[1-2]。随着应用范围的不断拓宽,对于SPWM的各项性能指标提出了更高的要求。例如,为了适应较宽的电压范围,就必须使其有较高的直流电压利用率,也就是说在均匀采样情况下,当调制度M>1以后,在较大范围内保持调制波和输出基波之间的线性关系。同时,还必须保证三相Vout输出相位准确、谐波分量小,以及算法的实时性强等。笔者结合国内外有关SPWM新动态,在原有算法基础上进行研究和实践,给出了一种满足上述要求的SPWM算法。
1 SPWM算法原理
1.1 原理简介
正弦脉宽调制(SPWM)技术,就是产生与正弦波等效的一系列等幅不等宽矩形脉冲波形[3]。等效原理是,每个矩形脉冲面积与对应位置正弦波面积相等。如图1所示,设矩形脉冲高度为US/2,宽度为 δi,中点角度为 θi,Um为调制正弦波的振幅,n为载波比,则等效面积原理可以表示为:


由(2)式可以明显看出,在载频固定,且给定输出角频率ω1(n=常量)情况下,等效脉冲宽度和调制度M成正比,和脉冲所在位置的正弦值sinθi成正比。也就是说,只要δi按正弦规律变化,SPWM就可以输出正弦电压;δi越宽,输出的电压值越高。

图1 算法原理图Fig.1 Algorithm principle diagram
在传统的SPWM方式下,为了保证输出波形为正弦波,当M=1时,每一桥臂输出电压的基波幅值只能达到0.5Udc。为了弥补直流电压利用率低的缺点,英国S·R·Bowes等人提出了准优化PWM技术。这种方法是利用三相系统中线电压具有自动消除相电压中3k[k=1,2,…]次谐波的能力来实现[3]。由于加入了3次谐波,使基波峰点附近下凹和平坦,当M>1.2时,才出现过调制。这种方法缺点是SPWM波和正弦波之间的连续过渡问题,同时,容易使相位信息失真,特别是三相不平衡时更严重。参考文献[4]中进一步应用了三次谐波注入技术,它是根据三相调制波的幅度情况,进行瞬间注入量计算,使合成调制波的幅值不超过三角波的峰值。提高了电压利用率,减小了开关次数,但是软、硬件开销较大。另一类提高利用率的方法就是在M>1之后改变调制波形状。印度V·Kaura等人于1996年提出了一种在时,通过给调制波上迭加上一个方波的方法[5],这种方法由于在M>1时要产一个矩形函数S,从而形成组合波形。该算法计算量偏大,而且还要进行相位校正,不利于实时计算。
笔者提出通过对调制函数预先整形的方法来扩展线性范围。这种方法的最大特点是工程上实现容易,不需要相位校正,动态范围超过一般VPPWM(Space-Vector PWM)。可充分发挥单片机优势。
1.2 等效面积补偿法
如图2所示,其中VS表示正弦调制波,横坐标表示角度值。Vms表示预整形后的调制波。当调制度Mi>1时,调制波VS将会失去M>1以上的面积(图中阴影部分),可以通过两边的面积进行补偿;使形成的新的波形VmS的基波分量等于VS(图中虚线波形)[4]。显然,欲补偿的有效面积和VS的幅值有关,也和Mi有关。
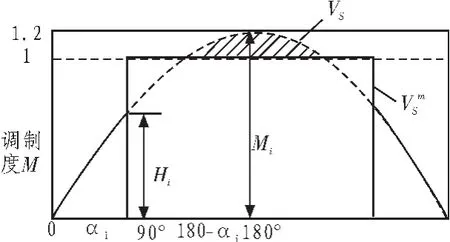
图2 等效面积补偿算法原理Fig.2 Equivalent area compensation algorithm principle
在M>1时,可建立如下公式:

(5)式表示Hi是调制度Mi、不同频段载波频率 fpwmi的函数。
从图 2 中,可得出在给定 fpwm情况下,Hi、Mi、αi之间关系:

利用上述关系式,有:

通过给定的Mi,可以确定αi,则VmS波形也就确定。在半周期内,由αi至180°-αi区间上桥臂为全导通状态,此时对应下桥臂处于关闭状态。 仅在 0°至 αi和 180°-αi至 180°区间形成和VS面积相等的PWM波,随着M的增大,αi减小,开关次数也减少。这种算法的最大好处是:计算量小,电压利用率高,在M>1以后,开关损耗明显下降。
2 SPWM算法的实现
如图3所示,变频调速控制系统采用infineon公司的16位单片机XC164CM作为其制核心实现SPWM算法。XC164CM的特点是:1)采用C166SV2内核,具有5级指令流水线,指令执行时间达到25 ns;2)2 k字节片内数据SRAM,64 kB片内FLASH;3)具有自校检的10位 14路A/D转换器,转换速度2.15 μs。4)具有单周期 16乘 16位乘法、32除16位除法指令,可快速处理复杂的数学运算[6]。
XC164CM的最大优点是:内部CCU6(CAPCOM6 unit,CCU6)单元使电机控制的外部硬件电路大大简化,其强大的运算能力可以完成很多复杂的算法,非常适应于变频调速的电控系统,使用十分方便。

图3 XC164构成的驱动电路Fig.3 XC164 driver circuit
电机控制功能主要在CCU6中完成,CCU6是专门为产生各种数字信号及进行事件捕获设计的,可以产生各类PWM信号以及多路PWM调制的时序信号,同时对给类触发时间或脉冲宽度进行时间测量,非常适用于电机驱动,电力控制等场合。
CCU6单元是由一个定时器模块T12与3个捕获、比较通道和一个定时器T13模块与一个比较通道组成的。定时器T12模块不仅可以独立的产生PWM信号或捕获触发信号,而且可以产生三相6个通道的SPWM信号,驱动交流电机或逆变器;T12模块与T13模块组合使用可以驱动、控制有位置传感器或无位置传感器的直流无刷电机。
三相SPWM波的形成,可以按图4流程进行。由公式(6)、(7)可知,Mi和 αi角度有确定的对应关系,Hi可通过 αi求得。当调制度M>1时,通过Mi求得相应的Hi,从而构成Vms波形;当M<1时,按常规方法进行处理,构成VS波形。
3 结 论
利用提出的三相SPWM算法进行实验,可以看出:变频控制器输出的三相电流正弦波失真系数明显下降,如图5所示。且输出波形三相比较平衡,波形质量提高,使得平均噪声与传统变频器相比下降约2 dB,效果令人满意。

图4 SPWM计算流程Fig.4 SPWM calculation process

图5 输出电流波形(横坐标:4 ms/格,纵坐标:2A/格)Fig.5 Output current waveform (x-coordinate:4 ms/case, ycoordinate:2A/case)
[1]林渭勋.现代电力电子电路[M].杭州:浙江大学出版社,2002.
[2]张燕宾.SPWM变频调速应用技术[M].北京:机械工业出版社,2005.
[3]Bowes,S R,Bullough.Optimal PWM microprocessor-controlled current-source inverter drives [J]. Electric Power Applications, IEE Proceedings , 1988,135(2):59-75.
[4]刘志晖,张青,陈坚.一种新颖的三相SPWM技术[J].电力电子技术,1997,31(2):3-7.
LIU Zhi-hui,ZHANG Qing,CHEN Jian.A novel three phase SPWM technique[J].Power Electronic,1997,31(2):3-7.
[5]Kaura V,Blasko V.A new method to improve linearity of a sinusoidal PWM in the over-modulation region[J].IEEE Trans.On Ind.Applicat,1996,32(5):1115-1221.
[6]Weiss R,Kattwinkel T.Sensorless regulation of a brushless dc motor with a C164CM[S].Infinenon Application Note,2001.
