Lokomat全自动机器人步态训练与评定系统的应用
2011-10-09郭素梅李建民吴庆文沈海涛
郭素梅,李建民,吴庆文,沈海涛
华北煤炭医学院 护理系,河北 唐山063000
Lokomat全自动机器人步态训练与评定系统的应用
郭素梅,李建民,吴庆文,沈海涛
华北煤炭医学院 护理系,河北 唐山063000
本文从技术参数调整、反馈信息应用两方面探讨了我国引进的首台Lokomat全自动机器人步态训练与评定系统的一些临床应用技巧。
步态训练;步态评定系统;技术参数;反馈信息
0 前言
减重运动平板治疗在近20年来被认为是一种效果最好的步态训练方法,它能使患者在早期进行以负重、迈步、平衡三要素相结合的步行训练,从而促进步态的改善[1]。此外,患者通过进行重复和特定任务的训练还有利于中枢神经系统的可塑性及功能重组[2]。但对于损伤较重的病人,由于其治疗对康复治疗师体力消耗较大、训练的持续时间短、强度不够、重复性差等原因,使减重运动平板训练方法的应用受到一定的限制[3]。最近几年神经康复领域已采用机器人设备对各种神经功能障碍的病人进行步态康复训练。Lokomat全自动机器人步态训练与评定系统(以下简称Lokomat)是应用最广泛的一种[4], 其步态训练的目标就是通过调节和控制病人下肢关节运动使其重新获得生理步行模式[5]。
1 系统结构
Lokomat全自动机器人步态训练与评定系统(如图1所示)由运动平板、减重系统及固定髋部和双下肢的两条腿部支具构成。整个腿部支具被连接到一个弹簧支撑的平行四边形结构上,弹簧用来支撑整个支具的重量,并具有调节平衡的功能。腿部支具的大小腿长度可以根据不同病人的腿长分别调整,它的膝髋关节有线性驱动器控制膝髋关节运动并保持其与运动平板的同步性。训练过程中,减重系统通过悬吊病人胸部绑带支撑部分体重;病人的双下肢由三个可调节的固定带固定到Lokomat腿部支具上;足部升降带固定病人的双侧踝关节于中立位,并在迈步时被动地引起足背屈。当病人有足够的踝部肌力及控制能力时,可以降低足部升降带的张力,这减少了病人的足部限制,有利于其发挥自主踝部肌力。Lokomat的膝髋关节运动轨迹、病人系数、对病人下肢的引导力、减重量及运动速度等参数通过计算机实时控制。此外,腿部支具的膝髋关节装有位置和力量感受器,它们通过两个计算机屏幕分别提供病人和治疗师观察病人的运动表现。
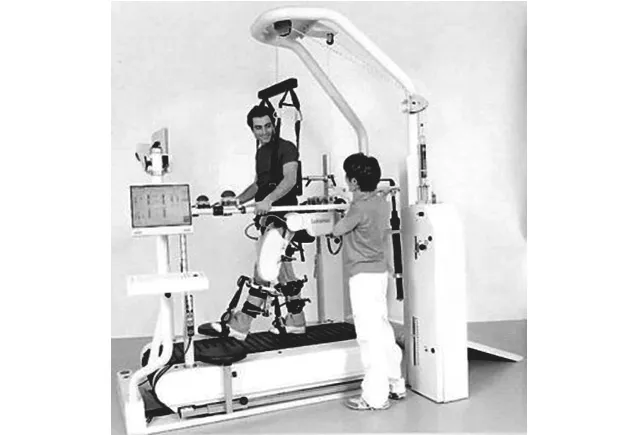
图1 Lokomat全自动机器人步态训练与评定系统
2 技术参数的调整
在应用Lokomat步态训练之前,治疗师要对病人的运动能力、生理功能、心肺耐力进行全面的评估,以作为训练参数调整的参考。另一方面,步行能力障碍的病人由于长期卧床或使用助行器助行,已经不习惯正常的步行模式,因此,病人开始训练时,大多数不能完全顺应其所引导的正常步行模式,下肢肌肉运动的协调性较差。这需要给病人一定的学习和适应时间,其长短根据病人的病情、认知能力而不同,所以开始几次训练的参数设置难度一般要低于病人的运动能力,待病人适应后再逐渐增加。
2.1 病人系数
病人系数大致相当于病人的小腿长度,它指示了Lokomat与运动平板的同步性。在训练过程中,病人系数的波动会受其他训练参数的影响,如果其偏离最佳位置,需要对相应参数及时进行调整。自动调整只有在引导力高于95%,减重量低于50%情况下才能发挥作用,多数情况下需要治疗师手动调整。当训练速度波动较大时,病人系数会发生偏离,这时既可以通过适当增大或减少膝髋关节角度来调整,也可以通过计算机屏幕上的病人系数上调或下调按钮来直接调整。需要注意的是,每次训练的速度要根据病人的运动能力适当变化,不要波动太大。如果增加的速度超过病人的实际运动能力,病人系数很难调节到合适位置,这时需要适当减速。此外,在训练速度不变的情况下,当引导力的调整与病人的运动能力不合适,或病人主动用力的方向和大小偏离于Lokomat引导的步行模式时,病人系数也可以出现较大的波动,这时除治疗师及时对病人口头鼓励指导外,还可以通过适当改变引导力来调整。
2.2 引导力
引导力的大小要根据病人下肢的肌力设置,如果设置太高,不利于病人的主动参与及肌力训练;如果设置太低,病人感觉下肢沉重,步行吃力,因在训练过程中达不到调整的髋膝关节角度,致使步长缩短。因此,不同的病人或同一病人有不对称的下肢肌力时要选择不同的引导力。此外较低的引导力说明病人肌力较强,因此要同时配合低的减重量,这种情况比较适合康复后期的病人。治疗师也可以将计算机屏幕显示的病人步行过程中反馈曲线的变化作为调整引导力的参考。当病人的主动活动长时间地对反馈值产生肯定的影响时,需要降低引导力。
2.3 减重的调整
减重量的调整要以病人步行过程中双下肢在支撑相不出现膝关节弯曲,并不感觉下肢沉重及迈步相不出现足趾拖曳为标准。对于有不对称下肢肌力的病人,减重量要根据较弱的下肢来调整。如果减重量太多,不利于腿部承重肌肌力训练。而且,减重30%所产生的步态参数最接近完全负重下的步态参数;减重大于30%,患者就失去足够的地面反作用力来推进他们的步行[6]。但如果减重量调整太少,较弱的下肢在支撑相出现膝关节弯曲,病人表现为一瘸一拐的步态,且支撑Lokomat腿部支具的平形四边形也会因为病人下肢支撑力不够而出现较大的摆动声响。有时病人在每次训练开始时减重量调整合适,但训练后期由于疲劳而出现支撑相膝关节弯曲及平行四边形摆动声,这时就需要适当增加减重量。此外,减重病人腿部绷带太松也可以影响膝关节的伸直,因此其在训练过程中的牢固固定很重要。
2.4 步速的调整
病人开始使用Lokomat训练时,速度不要调整太快,一般设置在1.5~1.7km/h,且引导力也相对大一些,先使其先对Lokomat 的步行模式有一个适应过程,然后根据病人运动能力逐渐加速。如果速度调整太快,超过病人(尤其是对于下肢肌力较差的病人)的承受能力,同样的引导力既会让病人感觉吃力,也会使其达不到合适的髋膝关节角度和步长,并使其不能保证步态质量和下肢肌肉的协调用力。每次给病人增加速度前,可以根据应用软件选择加速前与加速后的速度之间的变速步行训练,使病人逐渐适应后再增加速度,且在速度变化较大时还要适当增加膝髋关节的角度。总之,步速的增加要以保证步态质量及病人的舒适与适应为前提,治疗师可以通过观察计算机屏幕的反馈曲线和病人系数来判断。
3 反馈信息的应用
Lokomat通过两台计算机屏幕分别为病人与治疗师提供运动的动态的反馈信息,反馈值的大小主要与病人主动运动水平相关,病人的减量及运动平板速度对它的影响较少[7]。病人屏幕的反馈信息既可以同时展示双侧膝髋关节迈步相和支撑相的全部信息,也可以分别展示某个肢体,膝髋关节及步行相位。因为大多数病人很难集中注意力到全部下肢的运动,尤其对于由于神经损伤存在认知障碍的病人,所以一般推荐选择反馈信息分别展示。但如果病人只注重部分下肢运动,有时也会影响双侧下肢运动的协调性。因此,治疗师要注意监督与指导,同时也可以根据病人情况,交替选择展示部分或全部下肢运动的反馈信息。
通过反馈信息病人能够实时观察自己的步行行为,并且积极参与评估过程,这不但增加了病人的主动性和注意力,也是提高神经可塑性,最大限度恢复步行能力的重要因素[8]。病人屏幕的反馈信息有线图、水槽、和笑脸三种展示方式, 治疗师可以根据不同病人的喜好和认知能力选择。此外,反馈值的展示范围是可以调节的。治疗师要根据病人的运动能力设定反馈值的高限和底限,以始终展示给病人肯定的反馈信息,增强病人的自信心和积极性。治疗师显示屏幕只以线、图的方式同时展示双侧膝髋关节,迈步及支撑相的全部信息,因此使治疗师可以全面地监测病人的步行表现并及时提供针对性的训练指导。这也是防止病人注意力分散,提高病人训练积极性,增加反馈值的重要因素。例如,在迈步相指导病人顺应Lokomat步行模式积极主动地屈髋、屈膝、伸膝,以及在支撑期主动负重,并注意保持运动平板与Lokomat的同步性等。因为支撑期运动平板的助力作用,病人容易顺应跑台而相对被动(尤其在病人自主运动控制能力较弱时),所以支撑相反馈值容易偏低。治疗师一方面要指导病人支撑期主动用力;另一方面,虽然Lokomat对病人髋部有一定限制作用,治疗师也要同时指导病人主动进行双下肢交替重心转移与负重。随着病人的逐渐康复,治疗师可根据反馈信息适当调整训练参数,增加训练难度。
总之,治疗师只有全面了解Lokomat系统,并根据病人的运动能力不断地调整训练参数,才能使病人在精确控制的环境下最大限度地发挥的自主运动能力,并获得最佳的运动训练效果。
[1]尤爱民,辛玉甫,等.减重步态训练对脑外伤患者记忆功能障碍和注意力缺陷的影响[J].中华物理医学与康复杂志,2010,32(4):297-299.
[2]赵文汝,赵海红,等.异常步态校正减重步态重塑训练装置的机制及其临床适应症[J].中国组织工程研究与临床康复,2009,13(48):57-60.
[3]Hornby TG, Zemon DH, Campbell D.Robotic-assisted,body-weight-supported treadmill training in individuals following motor incomplete spinal cord injury[J].Phys Ther,2005,85(1):52-66.
[4]Joseph Hidler, Wessel Wisman, Nathan Neckel.Kinematic trajectories while walking within the Lokomat robotic gaitorthosis[J].Clinical Biomechanics,2008,(23):1251-1259.
[5]Colombo G, Joerg M, Schreier R, et al.Treadmill training of paraplegic patients using a robotic orthosis[J]. Rehabil Res Dev,2000,37:693-700.
[6]黄利荣,何璐,等.不完全脊髓损伤患者的减重助步训练[J].国外医学.物理医学与康复分册,2002,22(1):19-20.
[7]Lu nenburger L, Colombo G, Riener R.Biofeedback for robotic gait rehabilitation[J]. Neuroengineering Rehabil,2007,(4):1-4.
[8]Banz R, Bolliger M, Colombo G, et al.Computerized visual feedback:an adjunct to robotic-assisted gait training[J].Phys Ther,2008,88(10):35-45.
Clinical Application of Lokomat Automatic Robot Gait Training and Assessment System
GUO Su-mei, LI Jian-min,WU Qing-wen, SHEN Hai-tao
Nursing Department,North China Coal Medical College,Tangshan Hebei 063000,China
TP242
B
10.3969/j.issn.1674-1633.2011.03.034
1674-1633(2011)03-0094-03
2010-10-13
2010-11-20
本文作者:郭素梅,在读研究生。
李建民,教授。
作者邮箱:zxmqaz@126.com
Abstract:This paper discussed some clinical application skills about Lokomat automatic robot gait taining and assessment system from aspects of adjustment of technology parameters and the applications of feedback information.
Key words:gait training; gait evaluation system; technical parameters; feedback information
