机载电扫雷达单脉冲动目标检测工程分析
2011-09-30孔祥辉
张 铖 张 涛 孔祥辉
(西安电子工程研究所 西安 710100)
1 引言
文献[1]介绍了时域及基于主杂波跟踪(时间补偿)ADPCA两种方法,分析比较了两者性能;文献[2]介绍了两种频域ADPCA方法,并比较了时频域方法性能差异,但只分析了通道幅相误差的影响。笔者尝试直观说明两种频域ADPCA方法性能提高的机理及区别;探讨文献[1]时域方法权值计算的优化思路;借鉴文献[1]并补充空间相移补偿(空间补偿)和计算耗时分析,结合机载电扫单脉冲体制较全面的分析时频域ADPCA方法工程实现的基本问题。
2 方法介绍及性能分析
2.1 ADPCA 原理介绍
比相单脉冲形成见图1。
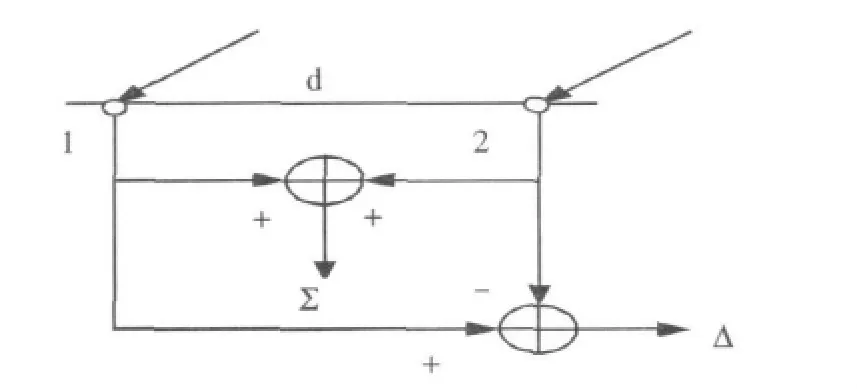
图1 比相单脉冲框图

式(1)、(2)分别为回波空间相移、多普勒频率,和差通道回波关系满足:

图2 时域ADPCA信处流程

其中β、α分别为仰角与扫描角;θ为杂波块偏离波束中心角度;V、d、λ与n分别为载机速度、子阵间距、波长和脉冲时刻。
系统输出[1]为:
式(4)中,Nθ为单个距离门杂波单元数。文献[2]根据机载雷达回波杂信比(CSR)较小的假设,采用最小输出功率法进行w0的计算,此方法理论上应使用当前距离门的CPI个脉冲进行w0计算(CPI为相干积累脉冲数),笔者称此方式为原始方法。文献[1]提出原始方法能够获得最佳效果,但考虑实时处理要求和其使用硬件系统的特点,采用几个相邻距离门的较少脉冲数做权值估计,性能有一定下降,但利于工程实现。笔者分析此工程简化方案在本文讨论的雷达体制下能起到优化权值本身的作用,因为实际地面情况十分复杂,相控阵天线可做成窄主瓣和低旁瓣,CSR动态范围比较大,笔者认为在距离向分辨率较高时邻近距离门杂波特性相近,且近似空间不相关,这样邻近距离门杂波序列可看作当前距离门的独立同分布样本,可用于估计杂波特性,且能去除当前距离门动目标影响,提高权值计算的适应性。
2.2 杂波局域化作用分析
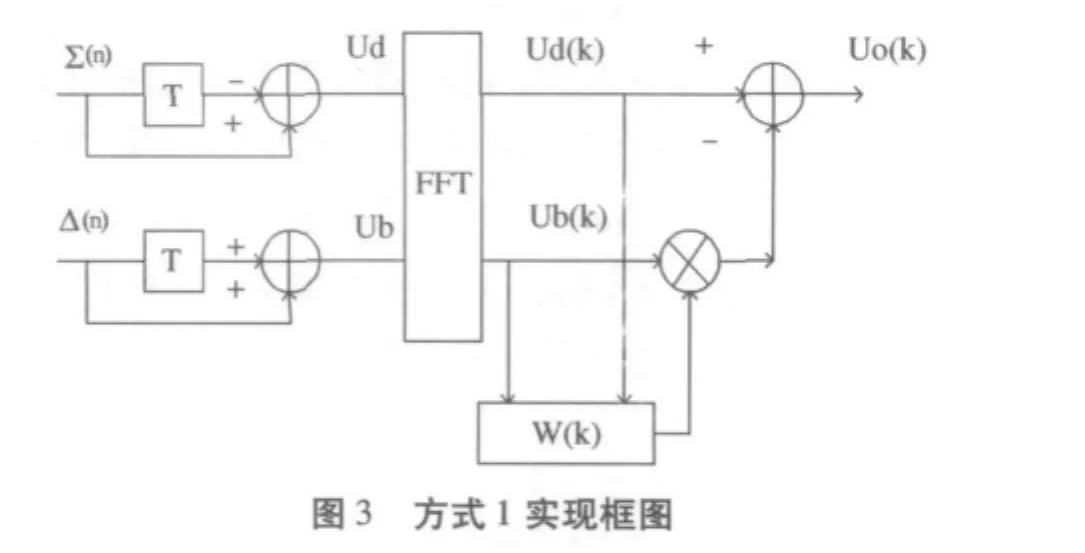
时域方法根本缺陷在于对某距离门所有杂波单元使用同一权值,而频域ADPCA[2]则利用傅里叶变换(FFT)将杂波区局域化,具体实现方式有两种,且两者作用机制不同。先推导方式1的作用机理,参见图3。

将信号换成不同杂波单元信号相干叠加的形式,则系统输出杂波为:

式(7)为式(6)带入式(3)结果。其中K(i)为杂波单元特征值,假定每个杂波单元对应一个角度,且脉冲间相关性很强,可设置第i个杂波单元信号为:

这样式(7)中:


图5 回波信号矢量补偿图
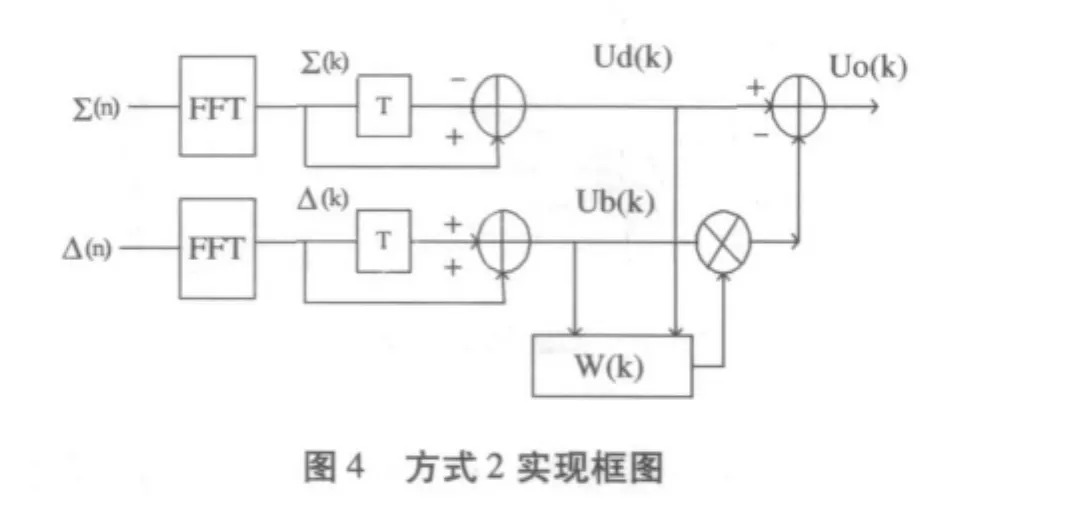
方式2作用机理也参见图5。只不过∑1、∑2、Δ1及Δ2的意义分别换成∑(k-1)、∑(k)、Δ(k-1)与Δ(k),FFT将空间角度与多普勒通道建立对应关系,相邻多普勒单元对应角度相邻杂波单元,相位差(del-phase)按照一定统计特性随机变化,在通道完全校准时,Δ(k)、Δ(k-1)分别与∑(k)、∑(k-1)正交,虽然

很可能导致补偿信号与对消剩余矢量不同向,但通过一个复数权值可调整至相同。通过以上分析,杂波局域化处理两种方式区别总结如下:方式1、2均用FFT将权值计算需要考虑的杂波范围局域化,但1方式近似看成转换为对单个角度杂波单元的处理,而方式2则使用两个相邻杂波单元的关系进行处理。以上分析均在理想条件下进行,即多普勒通道与杂波角度一一对应,脉冲间相关性强以及空间不相关等,实际中这些条件很可能不满足,且局域化方法(FFT)本身的因素,如FFT长度及窗函数等,也会影响杂波局域化效果,这样不同多普勒单元的权值实际仍需匹配一定数目杂波单元的特性,所以当不同杂波单元特性差异增大,不同多普勒通道权值匹配杂波特性效果会变差,只是受影响程度较时域方法较小。后续仿真采用计算量更小的方式1作为频域方法。
2.3 空时补偿以及d的影响讨论
文献[3]中提到了相控阵天线和差波束形成前补偿扫描角带来的空间相位差问题,并通过和差波束方向图特性说明了其必要性,而文献[1]则分析了空间补偿前提下时间补偿对时域ADPCA的必要性。笔者通过分析ADPCA作用机制更直观的说明这两种补偿的作用。时域ADPCA权值的计算是为了匹配不同杂波单元的特征值(K值),通过分析发现,K值与d及α的关系在四种预处理方式下是不同的(见表1)。

表1 四种预处理方式下K值表达式
对于时域处理,一个距离门只用一个权值,可近似认为不同杂波单元K值差异越大,抑制杂波效果越差。对于功能参数一定的雷达系统,前端d的设计需要考虑多种因素,设计完成后不易改变。假定系统典型参数分别为 V=60m/s,PRF=1000Hz,β =3.4°,取杂波角度θ在±1.5°间变化,计算得VT=0.0600m,由于机载雷达天线不易做大,取d在2VT到5VT间变化。由于两种补偿都针对扫描状态,取扫描角α为非零值即可,此处取5°。四种方式在不同d/VT值时杂波单元K值差异平均值如图6所示。

图6 四种情况d/VT对K值差异的影响
K值的影响因素众多,一定系统参数下两个正切函数比值在某些杂波角度下可能出现奇异值,而该杂波单元又可能不影响一定速度的目标检测,所以探究图6中曲线具体值意义不大,笔者只依据曲线走势分析几个点。a.图6中子图2两曲线水平差异明显,可见在完成时间补偿前提下,空间补偿能够减小杂波单元K值差异,而子图1两曲线差别小,可能因为信处流程中其他因素的影响改变这种关系带来的效果。b.子图3说明在空间补偿的前提下,主杂波跟踪能够减小杂波单元K值差异,两曲线随d增大都呈上升趋势,这与文献[1]中d/2VT增大会降低时域ADPCA性的结论一致。但此处由于d/VT变化范围不大,子图3中不同d/VT值下K值差异也很小,预计对杂波抑制性能影响不大。图6中方式3、4曲线相对1、2随d/VT变化小,这说明空间补偿能减小d/VT值对K值差异的影响。比较四条曲线可知同时做空时补偿的方式4能够使杂波单元K值差异相对最小,使得一个权值抑制效果有了较大提高的可能。而对于频域ADPCA,由2.2节分析可知,不同杂波单元单独处理使杂波单元K值差异对算法性能影响应该有一定程度的降低。
3 实验结果及分析
仿真实验基本条件见表2所述。

表2 仿真实验基本条件
3.1 改动权值计算方式效果探究
α为0,目标在主波束中心,目标径向速度为3m/s。通过设置不同CSR,比较采用原始方式(方法1)与改动方法(方法2)计算时域ADPCA权值带来的性能差异。为简化问题,方法2选取两个相邻距离门的CPI/2个脉冲,保证计算量不变。仿真结果如图7所示。

图7 两种方法在不同CSR下的改善因子表现
图7中,在CSR为-10到20dB区域,方法2效果好于方法1,且CSR越小,方法2优势越明显,说明方法1权值计算效果受目标信号影响较大;而在常见CSR值区域,两者效果相当,说明方法2采用其他距离门信息引起的杂波估计精度损失对权值影响不大,可见方法2在一定程度上提高时域方法的鲁棒性。当然实际工程中,邻近距离门也可能存在动目标,此实验指导意义只在于提供ADPCA系统需根据实际情况合理选择权值计算单元的思路。
3.2 探究空时补偿及d的影响
动目标设置同3.1节,α取5°。探讨四种预处理方式在不同d/VT值下对时频域ADPCA杂波抑制效果的影响。
由图8可知,时频域ADPCA采用同种预处理方式时,频域方法效果均好于时域方法;方式1,2的信杂比改善(IF)基本随d增大呈下降趋势,而方式3、4的IF几乎不受影响,这说明空间补偿可以减小系统d具体设计对杂波抑制性能的影响。结合方式3、4,在空间补偿前提下,时间补偿对时频域性能都有提升作用(频域提高约10dB,而时域提高约30dB),但是否进行时间补偿对时域方法影响更大。结合时域四种方式的IF曲线,可知方式4水平最高,说明同时进行空时补偿对于时域方法很有必要。时频域方式2、4的IF曲线也基本反映2.3节时间补偿前提下空间补偿减小K值差异的分析结果。频域四条曲线有所差异,即性能仍受到不同杂波单元K值差异程度影响,但曲线差异程度相对时域较低,在d/VT较小时明显,即频域方法受K值差异影响程度小,这与2.2节杂波局域化优化ADCPA性能,但受限于各种局域化效果影响因素的结论一致。

图8 四种预处理方式下时频域处理性能比较2
图8中频域方式1曲线在d/VT小于3.5时高于时域方式4曲线,在d/VT小于2.8时,IF高于频域方式4处理。实际中d的设计为满足DPCA条件,需参考载机速度与脉冲重复频率,虽然各种误差因素带来的影响会使d/VT与2偏离,但很多情况下偏离不大,所以研究“不做任何补偿的频域ADPCA”(fADPCA)与“同时完成空时补偿的时域ADPCA”(kfsADPCA)的性能差异具有一定实际意义。
3.3 杂波局域化处理优化作用探究

图9 fADPCA与kfsADPCA性能比较
这里以IF为指标比较fADPCA与kfsADPCA的性能。动目标速度:[-3m/s:2.5m/s],其他参数同前。由图9可知,在误差不大且d设计参考DPCA条件的情况下,频域方法IF上升更快,这说明杂波局域化不仅能够提高ADPCA杂波抑制性能,且不需针考虑空时补偿,减小了信处开销。
4 计算代价分析
3.3 小节参与比较的两种方案归纳如下:“kfsADPCA主杂波抑制+MTD”(方案1)与“fADPCA主杂波抑制”(方案2)。由于方案涉及细节很多,这里只对两种方案计算代价差异进行大致分析。已知NFFT点FFT等价为NFFT×7/2个复乘及NFFT×7个复加运算[4],假定距离门数为N,相干积累脉冲数为M。
下面结合某型号机载战场侦察雷达实际情况,取M=65,N=4096及NFFT=64。方案1计算量为3289088个复乘及3653632个复加,方案2计算量为5242880个复乘及6029312个复加,可知方案2的复乘复加分别为方案1的1.59倍(增加1953792)与1.65倍(增加2375680),不做空时补偿为频域ADPCA节省了790528个复乘运算。
笔者认为具有2片TS101芯片的硬件平台代表着一般实时处理能力。以此平台结合文献[4]计算量及硬件耗时分析,得出6690160个复乘与6088120个复加的杂波抑制处理加上恒虚警检测和测角的时间不超过54ms。方案2相对上述运算量减少了1447280个复乘和58808个复加,可知方案2本身耗时小于相干积累时间(65/1000=65ms);方案2比1耗时增加接近为16ms(54/2*0.6),如果硬件性能提高,如四片TS201芯片,耗时增加仅为4ms;如果将复乘复加看作等时运算,不做空时补偿能够节省3ms(54/(6690160+6088120)*790528),可知如果不省去空时补偿,方案2耗时更接近相干积累时间(54+3.3=57.3ms),且实际复乘耗时大于复加,耗时节省应该更大,即不省去空时补偿,处理时间增加更多,这样对于平台运算能力更差的系统,不省去空时补偿可能导致方案2耗时大于65ms,不满足实时要求。
表3 两种方案计算量比较
5 结束语
本文首先分析了实际工程中时域ADPCA权值计算问题,并讨论一种改进思路,仿真结果证明了其有效性。其次通过直观清晰的理论分析探讨了频域ADPCA的优化机理及两种实现方式的区别;并以杂波单元特征K值为出发点探讨了单脉冲电扫机载雷达的空间补偿、主杂波跟踪以及前端子阵间距设计对时频域ADPCA杂波抑制性能的影响,仿真结果表明空间补偿能够明显减弱子阵间距设计或误差引起的d/VT值变化的影响,且空间补偿和主杂波跟踪对于时域ADPCA十分必要,只做主杂波跟踪不做空间补偿会降低ADPCA性能,频域ADPCA能够通过杂波局域化减弱各种因素的影响。最后通过比较发现,无任何预处理的频域ADPCA在系统误差不大时相对于同时完成空时补偿的时域ADPCA能以少量处理耗时的增加获得杂波抑制性能的提高,工程可实现性好,且去除空时补偿带来的耗时节省是可观的。以上结论对于采用ADPCA作为杂波抑制处理方案的机载电扫单脉冲雷达信处系统设计具有一定指导意义。
[1]薛巍.基于DPCA的机载雷达主杂波自适应抑制技术研究[D].电子科技大学博士学位论文,2001,16;39-46;49-55.
[2]沈明威.和差波束空时处理动目标检测技术研究[D].南京航空航天大学博士学位论文,2008,19-26.
[3]柳桃容等.机载X波段雷达的双通道空时自适应处理的试验研究[J].信号处理,2003,19(1).
[4]李永,基于ΣΔ-STAP的杂波自适应抑制技术及并行DSP实现研究[D].成都电子科技大学硕士学位论文,2005,29-30;55-57.
