无人机自动控制仿真系统研究与实现
2011-09-27王智超王林林
王智超,王林林,刘 春
(沈阳航空航天大学航空宇航工程学院,辽宁 沈阳 110136)
随着航空技术的发展,无人机越来越走向高精度和小型化的道路,导航控制方式也由遥控方式向自主和智能方向发展,所以就要求作为控制核心的飞行控制系统具有精度高、体积小、稳定性好等特点[1]。
飞行控制系统的核心是:飞行控制系统和导航系统。GPS定位系统已经广泛应用于航空领域,使用GPS定位系统导航的某型号无人机控制方式包括以下3种:
(1)手动飞行。用操作杆操纵无人机飞行;
(2)手动半自动飞行。用手动遥控指令结合自动控制调整控制无人机飞行;
(3)程控自动飞行。使用真实飞机验证导航系统和控制系统的可靠性存在一定的风险,而且在训练无人机操作手时操作失误的几率更大,所以采用在实验室里采用计算机仿真技术模拟无人机的飞行,在地面对其导航和控制系统进行仿真,设计导航和控制系统。通过模拟地面控制台遥控指令或控制手柄来控制无人机的飞行,可以训练操作手在复杂环境下操作无人机的能力[2]。
1 实时仿真系统组成
1.1 总体设计
系统主要有以下组成部分:无人机模型系统、飞行环境模拟系统、飞机动力学模型、飞行控制台、GPS导航模型系统,控制系统等。其设计示意图如图1如示:
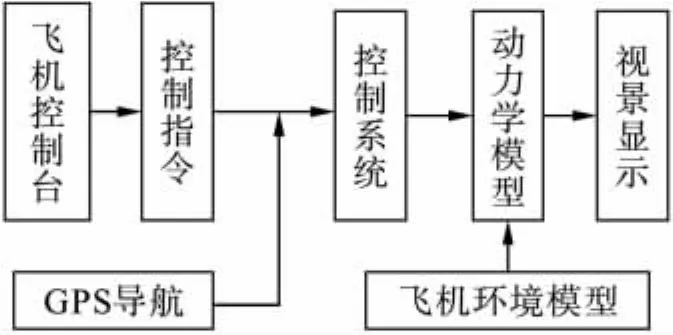
图1 系统设计示意图
1.2 仿真系统工作流程
通过GPS获取无人机位置坐标,将WGS-84坐标系[3]转化为空间直角坐标,将这些数据传输给飞行控制系统。飞行控制系统根据导航数据实时控制无人机的姿态角,并将这些角度传送给飞机动力学模型计算飞机的飞行数据,实现模拟飞行,然后由OSG仿真系统实现显示出来。对无人机飞行轨迹和真实航线轨迹数据对比,即可验证导航系统的稳定性和正确性。加设飞行环境模拟系统,将飞行环境模拟系统的数据导入到动力学模型来模拟风、雨等天气对无人机飞行的影响,从而增加仿真系统的真实性。
2 控制系统设计
飞行控制系统分为飞机姿态控制回路和航迹飞行控制回路,飞机姿态控制回路包括俯仰角控制回路、滚转角控制回路、偏航角控制回路。其中俯仰角控制回路决定纵向飞行的稳定性;滚转角控制回路和偏航角控制回路决定了横向飞行的稳定性[4]。飞机姿态控制回路决定了飞机的稳定性,每种飞机都有自己的控制律,可以适当地调整增益系数的大小,既可以达到飞机的性能指标[5]。
2.1 航向纠偏控制回路
航线飞行时,偏离航线的飞行通过副翼和方向舵协调控制予以纠正,这种控制的特点是航向信号送到副翼通道,同时副翼通道工作后产生的滚转信号引入方向舵通道,具有一定角度的转弯状态下其控制律为式1:

其中φ为滚转角,φ为偏航角,φg为给定航向角;Kφ、Kz、Kφ、Kφ.、Kφ
.为增益系数。通过实验测试可以得到增益系数的大小。飞机实时位置到航线的水平距离作为侧偏距,即Δz,如图2所示

图2 航迹仿真示意图
P0点是飞机某一时刻的位置,可以从导航系统获得。当前航线方向是从p1航点飞向p2点。侧偏距的长度等于p0在xoy平面的投影p'1到当前航线p1p2在xoy平面的投影p'1p'2的距离,如图2所示,线段 的长度即为侧偏距的长度。由向量得到向量(X,Y,Z),向量的Z项的符号决定侧偏距的正负,即确定飞机位于航线的左侧还是右侧。根据右手坐标系,当飞机的位置位于航线的左侧时,向量的Z项为正;当飞机的位置位于航线的右侧时,向量的Z项为负,这样就可以求得侧偏距。偏航角和滚转角从动力学模型中获得。当飞机处于航线自动飞行状态下时,所有偏离航线的改变将由此控制回路予以纠正。
2.2 手控转程控的控制策略
飞机沿航迹飞行时横向控制是由自动纠偏控制来完成的,飞机的控制律的变化取决于侧偏距、偏航角以及舵机效率。在手动控制切换到程控过程中,如果飞机偏离航迹线过远,会出现侧偏距和偏航角同时过大的情况,这时候飞机舵面的偏转会非常大,容易引起飞行事故,通过加设虚拟航点的方式可以解决这种隐患的发生。以飞机的当前位置为虚拟航点,以此虚拟点作为航线的起点,以航线上离此点最近的未飞航点作为待飞航点,当飞机偏离实际航线的距离小于某一阀值时,删除此虚拟点,重新进入正常航迹飞行状态。真实侧偏距的阀值可以通过实验获得,一般不要大于200 m。这样既可以防止舵面偏转过大的情况出现,并且能以最经济的路线进入预定航线。
3 航迹点管理
航迹点管理用于维持无人机在航迹飞行中的航迹信息和航迹点信息。固定翼飞机的航迹点管理具有通用性,可以设计完整的航迹点管理类CLineManage类。飞机在按航线飞行时,顺序的经过航线上的航迹点,可以通过栈实现CLineManage类,在C++中通过vector实现,这种方式既可以保证飞机按照航点顺序飞行,也可以保护航线不被非法修改,提高了控制系统的可靠性。
3.1 航迹点信息
航迹点的信息主要包含该点的坐标、该点的类型,如果是盘旋点,还要附带盘旋的时间。所以航迹点可以定义成数据结构LinePoint,这个结构包含坐标信息、类型、以及盘旋时间。航点类型主要用于标示飞机在该航点处所要做的动作,比如盘旋、8字飞行、进场等。
3.2 航迹信息
航迹管理类中需要定义航迹栈、已飞航迹栈、待飞航迹栈以及返航航迹栈。同时要定义飞机刚刚飞过的航迹点,以及下一个待飞航迹点,这两点即为当前航迹的起点和终点,这两个点分别是已飞航迹栈和待飞航迹栈的栈顶元素。以航迹栈为例,其定义方式为 vector<LinePoint> m_line-Points。航迹栈用于存储整条航迹线上的所有航迹点;已飞航迹栈和待飞航迹栈分别用于存储飞机飞过的和待飞的航迹点;返航航迹栈用于存储返航时所要飞行的航迹点。可以使用迭代器vector<LinePoint>::iterator对各个栈数据进行操作。航迹管理除了提供对各个栈的出栈、入栈、清空等方法外,还应提供删除、修改、插入航点、判断航点是不是航迹线上的点、以及查找距离某点最近的航点。可以根据需要扩展此类。需要注意的是在向已飞航迹栈入栈数据时,需要判断航点是不是航迹线上的点,如果不是则不允许入栈。
3.3 在控制中使用航迹管理类
航线装订完毕的情况下,使用航迹管理类的情况主要包括:在起飞后寻找航线,航点切换、返航、选点飞行以及手控转程控时寻找航线。可以归结为三种操作方式:没有辅助航迹点的飞行、含有航迹辅助航迹的飞行以及返航。
(1)没有辅助航迹点的飞行
这种飞行没有辅助航迹的参与,当前航线的起点和终点都是航迹栈里的点,这种操作方式包括航点切换和选点飞行。航点切换时将待飞航迹栈出栈,并将出栈的元素入栈到已飞航迹栈;选点飞行保持已飞航迹栈不动,将待飞航迹栈出栈,直到栈顶元素和目标航点相同为止。
(2)含有航迹辅助航迹的飞行
这种飞行主要是针对寻找航线的操作。在飞行中为了安全飞行,添加了一些临时航点,一旦飞机进入正常航线,这种航点将自动清除,继续按航线飞行。这种控制方式是通过临时航点和待飞航迹点作为自动纠偏航线,同时以已飞航迹栈的第一个点和待飞航迹点作为真实侧偏距计算飞机和真实航线的偏差,当真实侧偏距小于一个阀值的情况下,则删除临时航点,使用已飞航迹栈的第一个点作为当前航线的起点,终点不变。
(3)返航
在正常航线飞行时,飞机将未飞航迹栈作为飞机航线导航航迹,在返航的情况下则需要将返航航迹栈作为导航航迹,返航的位置是由飞机接到返航指令的位置决定的,所以返航航迹栈在返航函数中产生,其方法是将航迹栈复制出一个副本,将副本里的数据出栈,并将出栈的数据依次入栈到返航航迹栈内,切换航点时将返航航迹栈的航点出栈一次,并将该航点入栈到已飞航迹栈中。分别以已飞航迹栈和返航航迹栈的栈顶元素作为当前航线的起点和终点。既可以完成返航,这样可以保证返航的控制方式和正常飞行的控制方式保持一致。
4 仿真实验
仿真系统的各子系统在 Visual C++.net 2005结合OSG环境下设计并完成。此系统用于验证导航和控制系统,以及训练无人机操作手,所以仿真时首先验证飞机沿航线飞行能力,观察控制系统的稳定性。接着验证在地面站指令下,飞机做航线切换、盘旋和着陆等任务。验证系统的准确性和实用性。
4.1 仿真任务
(1)自主飞行。规划好航线,由导航和飞行控制系统控制飞机沿航迹线自主飞行;
(2)程控状态下通过指令调整飞机飞行状态。通过指令使飞机完成盘旋、选点飞行、航线切换以及手动程控切换等任务。
4.2 仿真结果
无人机由机场跑道起始点A点起飞,在B手动转程控进入航线飞行,沿CDEFC航线飞行,在C点处通过地面指令切换航线到GH航线。在G点做盘旋,在H点处发送进场指令。I点是距机场跑道起始点A约7000 m,经过I点后,模拟下滑波束导引系统实施着陆。因为采用比例驾驶仪控制,飞机的轨迹和围绕航线有轻微震荡。进入航线正常飞行后,侧偏距可以控制在20 m以内。
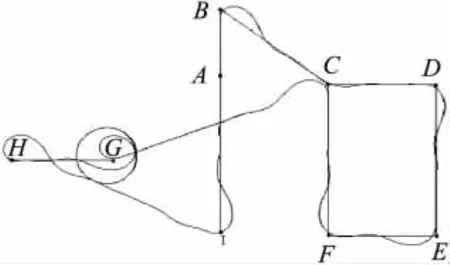
图3 仿真效果图
5 结论
本文研究了无人机自动控制仿真系统的实现方法,采用面向对象方法构建了通用的航迹点管理类。根据转弯控制律,结合俯仰角控制回路和航向纠偏控制回路,以及加设虚拟航点的控制策略,实现了无人机按照预定航线的飞行控制和在不同控制方式下无人机大姿态变化的安全控制,同时把侧偏距限制在一定范围内,增加了控制系统的准确度。可用于训练无人机操作手,具有一定的工程价值。
[1]高建尧.某型无人机导航控制仿真与软件实现[D].西安:西北工业大学,2002.
[2]马登武,叶文,于凤全,等.虚拟现实技术及其在飞行仿真中的应用[M].北京:国防工业出版社,2005.
[3]王小斌,闳建国,凌琼.基于GPS仿真器的无人机导航系统半物理仿真研究[J].计算机测量与控制,2008,16(3):401 -406.
[4]杨俊鹏,祝小平.无人机倾斜转弯非线性飞行控制系统设计[J].兵工学报,2009,30(11):1504 -1509.
[5]吴森堂,费玉华.飞行控制系统[M].北京:北京航空航天大学出版社,2005.
[6]王划一.自动控制原理[M].北京:国防工业出版社,2001.
[7]卢惠民.飞行仿真数学建模与实践[M].北京:航空工业出版社,2007.
[8]陈海,王新民,焦裕松,等.无人机覆盖路径规划中转弯机动的运动学分析[J].飞行力学学报,2010,28(2):31-34.
[9]郭佳,郭连成,张丽,等.基于OSG仿真系统视景平台的研究与开发[J].沈阳航空工业学院学报,2010,27(4):1-4.
