基于地磁感应的无线车辆检测系统的设计研究
2011-09-19高玺广王志刚
高玺广,王志刚,徐 莉,张 博
(河北工业大学 信息工程学院,天津 300401)
随着世界经济的发展,汽车持有量逐年递增,导致城市交通状况日益恶化,为解决不断加剧的交通拥堵问题,提高交通质量和通行能力,20世纪80年代末90年代初出现了智能运输交通系统[1](ITS),作为一个跨学科、信息化和系统化的综合研究体系,它是将先进的信息技术、自动控制技术、电子传感器技术、计算机技术、人工智能技术、定位技术、地理信息系统技术、信息与通信技术及图像分析处理技术等有机结合起来,并应用于整个地面交通管理系统而建立的一种大范围、全方位发挥作用的实时、准确、高效的综合交通运输管理系统。而对现场车辆信息的检测采集是实现交通系统智能控制的基础,对与路口车流量、车速、车道占有率、等待时间等信息的实时采集,对交通工程师制定的配时方案的优劣和信号灯的自适应控制效果有重大影响,故车辆检测器及其检测技术水平依然是缓解交通拥堵,提高ITS管理运行效果必须解决的首要问题。
车辆检测器的种类很多,而且都在现代智能交通系统中起了不可估量的作用,目前国际上常用车辆检测技术主要有环形线圈检测器、视频检测器和微波检测器[2]。环形线圈检测技术成熟、检测精度高、可靠性好,但安装维护复杂,破坏路面严重,安装和维护费用较高。视频检测能够提供大量交通管理信息,可直观地观测交通现状,但检测精度较低,易受外界环境影响,存在大型车辆遮挡小型车辆的问题。微波检测可以侧向检测多车道的车辆信息,此外还可以检测静止车辆,但安装精度要求高,对于具有铁质隔离带的道路,检测精度明显下降[3]。地磁车辆检测器是一种新型的车辆检测技术,是一种基于磁阻传感器的车辆检测技术,尺寸小、检测精度高、可靠性好、安装方便、破路面积小,大大降低了使用费用。本系统采用无线通信技术进行数据传输,无需布线,进一步减少了对道路的损害和安装维护费用。
通过在对各种车辆检测器分析研究的基础上,笔者提出了这种基于地磁感应的车辆信息检测方法,这种方法采用各向异性磁阻(Anisotropic Magneto Resistive,AMR)传感器技术通过对车辆经过时产生的地球磁场的扰动进行检测,对采集到的数据进行处理,从而获得交通流量、车道占有率和车辆类型等交通信息。首先介绍了地磁车辆检测技术的原理,然后对无线车辆检测系统各模块的结构和车辆检测算法进行了介绍。
1 系统结构与检测原理
1.1 系统结构
无线车辆检测系统由无线检测器 (wireless detective sensors)、 无线路由器 (wireless access point)和路口协调器(coordinator)组成。系统的无线网络结构如图1所示。

图1 无线车辆检测系统无线网络结构Fig.1 Wireless network diagram of wireless vehicle detecting system
检测器通过检测车辆经过时地球磁场的变化得到所需的车辆信息的参数,并通过无线发射模块将采集到的数据传输给无线路由模块或者路口协调器。无线路由器负责数据的转发,在系统中起中继的作用,从而延长通信距离。路口协调器对整个路口的无线车辆检测系统进行协调控制,接收下端的信息传输给控制中心,并将上端的控制命令下发到各终端。
1.2 检测原理
笔者设计中采用各向异性磁阻传感器(AMR),该传感器利用铁镍导磁合金的磁阻效应来检测地磁场的变化,即在铁磁金属的某个方向上施加磁场会改变该铁磁金属的电阻值,而且这种改变在一定范围内可以认为是线性的,其中能够引起磁阻效应的方向称为敏感方向或者感应方向[4]。在地球磁场的测量范围内,AMR传感器的输出可以看做是线性的,并且可以准确检测出地球磁场1/12 000的强度和方向的变化,因此AMR传感器非常适合用于测量地球磁场。
地球磁场强度大约是0.5~0.6高斯,虽然地磁在不同的地方会不一样,但在很广阔的区域内(大约几公里)基本是恒定的。在测量范围之内,可以认为在没有扰动情况下是恒定的。当有车辆进入传感器测量范围时,必定会影响传感器周围地球磁场的分布,形成扰动,从而测得有无车辆经过[5]。检测器可以同时采集分别与地磁相关的X轴、Y轴和Z轴方向的数据,其中X轴检测与车辆行驶方向平行方向的磁场值,Y轴检测与车辆行驶方向垂直方向的磁场值,Z轴检测与地面垂直方向的磁场值。
2 系统各模块硬件结构
2.1 检测器模块
检测器模块结构如图2所示,由地磁检测部件、微处理器、无线发射模块组成。地磁信号检测部件采用Honeywell公司的三轴磁阻传感器HMC5843,带有IIC数字接口,能够直接将采集到的磁场信号传输给主控芯片。该传感器轴向灵敏度高,垂直轴间灵敏度低,用于测量地球磁场方向和磁力,能够检测出十万分之几高斯到6高斯的地磁场。由于检测器埋于地下,采用锂电池供电,必须采取措施降低检测器的功耗,故本系统中采用低功耗的MSP430F169作为主控芯片。TI公司的MSP430系列的单片机采用1.8~3.6 V电压供电[6]。若1 MHz的时钟条件下运行时,芯片的电流在200~400 μA左右,等待方式下能耗为0.7 μA,时钟关断模式的最低功耗只有0.1 μA,而在5 MHz的工作频率下,MSP430的功耗大约为1.5 mW。CC2420是Chipcon公司的一款符合2.4 GHz IEEE 802.15.4标准的无线收发芯片。它基于Chipcon公司的SmartRF 03技术,使用0.18 μm CMOS工艺生产,具有很高的集成度,广泛应用于低功耗的无线通信系统中。CC2420的选择性和敏感性指数都超过IEEE 802.15.4标准的要求,可确保短距离通信的有效性和可靠性。数据传输率可达到250 kb/s,可以实现多点对多点的快速组网,完全能够满足系统的要求。

图2 检测器模块框图Fig.2 Block diagram of detective sensor
2.2 路由器模块
路由器模块起数据中继的作用,其结构如图3所示,Flash用于存储采集到的数据,增加射频放大器CC2591可以延长通信距离。CC2591是TI公司的高性价比和高性能的2.4 GHz RF前端,适合低功耗低电压2.4 GHz无线应用。CC2591集成了开关,匹配网络和平衡/不平衡电路,电感,功率放大器(PA)以及低噪音放大器(LNA),输出功率高。

图3 路由器模块框图Fig.3 Block diagram of router
2.3 路口协调器模块
路口协调器将接收到的数据传输给信号机,信号机通过对这些数据进行处理,获得车辆的特征信息,从而得到所需车速、车道占有率、车型等交通流信息。信号机将这些信息发送到交通控制中心,同时可根据这些信息自动选择运行不同的配时方案。路口协调器把接收到的控制中心的命令下发给各个检测器,实现整个路口的协调工作,如图4所示。
3 车辆检测算法
本文采用动态基准值的车辆检测算法,在不同时段动态更新基准值。由于受外界环境的影响,检测器检测到无车情况下的信号并不是一个稳定的值,这会产生基准线的漂移,从而造成车辆的误检,采用动态校正基准值的方法来解决这个问题。在无车的情况下,检测器可在一天中的不同时段自动进行基准值更新,校正次数可以由上端设定。动态基准值的计算公式为

图4 路口协调器模块框图Fig.4 Block diagram of intersection coordinator

其中Bj(i)为一天中第i次校正j轴的基准值,i的值可有上端设定,j分别代表X轴、Y轴、Z轴,n为预设的计算基准值时的滑动窗口长度,jk为j轴的某一个采样值。
为提高检测的准确度,本文采用差分算法对采集到的车辆信息进行处理。其数据处理流程如图5所示。
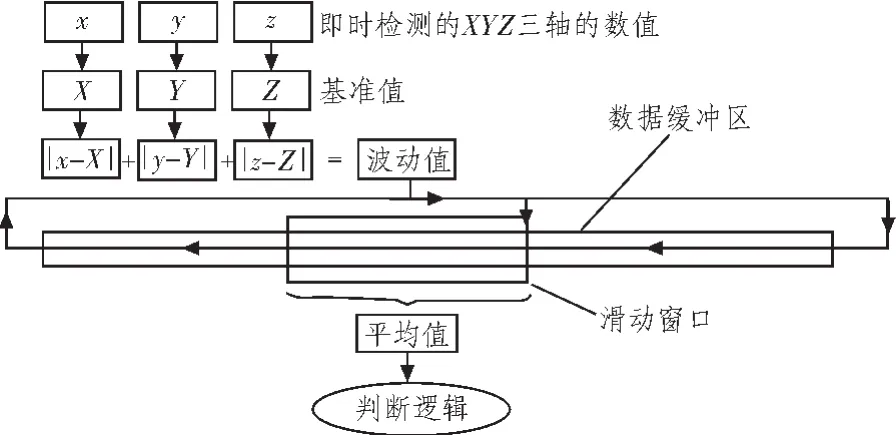
图5 车辆检测算法示意图Fig.5 Chart of vehicle detection algorithm
X轴计算公式为:

其中xi为检测器采集到的X轴的数据,x为X轴动态基准值。
Y轴的差分计算公式为:

其中yi为检测器采集到的Y轴的数据,y为Y轴的动态基准值。
Z轴的计算公式为:

其中zi为检测器采集到的Z轴的数据,z为Z轴的动态基准值。
通过计算各轴采集的数据与基准值差值的绝对值,便可得到各轴波形的波动值,为提高检测精度,减少外界干扰,采用3个轴的波动值之和作为本次采样的波动值存入缓冲器,波动值计算公式为

当缓冲器中数据个数达到滑动窗口长度N时,计算其平均值dave,滑动窗口的长度会根据实际的检测情况自动调节。与预先设定的阈值θ进行比较,比较结果or作为输出。当or=1时表示有车,or=0时表示无车 。

3.1 交通流量(traffic volume)测量
单位时间内通过道路某一截面的车辆数量,此以单车道计数即为车流量,计算公式为

其中tv为单位时间内的交通流量,n为t时间内通过的车辆数。
3.2 时间占有率计算
时间占有率为道路某检测截面或检测区内有车存在的时间与统计总时间之比。假设车辆占用检测器的时间为Ti,统计时间为t,有n辆车经过检测器,各个车占用时间分别为T1、T2、T3、…、Tn,则统计时间内时间占有率 Qri为:

3.3 车速的检测


4 结束语
笔者设计中采用各向异性磁阻(AMR)传感器技术通过对车辆经过时产生的地球磁场的扰动进行检测,从检测信号中提取所需的特征参数,从而计算出各种交通参数。利用无线通信技术将采集到的数据传输到控制中心,减少了布线造成的对路面的破坏。笔者设计的基于地磁感应的无线车辆检测系统,检测器尺寸小,灵敏度高,成本低且不易受外界环境干扰。所使用的算法仍可以进一步改进,并可增加一些智能算法,这也是进一步研究的一个方向。
[1]黄卫,陈里得.智能运输系统(ITS)概论[M].北京:人民出版社,1999.
[2]赵亮.单线圈车辆检测器的研究与开发[D].山东:山东大学,2005.
[3]金盛.环形线圈检测器交通数据预处理方法研究[D].吉林:吉林大学,2007.
[4]周丰,王明哲,倪枫.基于AMR传感器的行驶车辆检测分类算法[J].计算机应用研究,2010,27(7):2533-2535
ZHOU Feng,WANG Ming-zhe,NI Feng.Passing vehicle classification algorithm based on AMR sensors[J].Application Research of Computers,2010,27(7):2533-2535.
[5]陈华.基于AMR地磁感应检测器的车辆检测和分类识别[D].天津:天津大学,2009.
[6]沈建华,杨艳琴.MSP430系列16位超低功耗单片机原理与实践[M].北京:北京航空航天大学出版社,2008.
