基于加权总体最小二乘的平面点云拟合方法
2011-09-19楼立志陈玮娴
袁 庆,楼立志,陈玮娴
(同济大学测量与国土信息工程系,上海200092)
基于加权总体最小二乘的平面点云拟合方法
袁 庆,楼立志,陈玮娴
(同济大学测量与国土信息工程系,上海200092)
根据每个点云激光反射强度不同以及对于系数阵A的部分修正,在地面三维激光的平面点云拟合中引入加权总体最小二乘的方法,建立较最小二乘方法和总体最小二乘方法更加合理的模型。根据相应的迭代算法,经实例计算证明该方法更加合理,可以获得更高精度的参数解。
点云;EIV模型;平面拟合;加权总体最小二乘
一、引 言
在地面三维激光扫描的应用中,经常会遇到一些点云平面的拟合问题,如墙面平整度检测、道路路面数据拟合等[1]。所谓平面点云拟合,即从扫面点云数据中得到一组有关平面的数据(xi,yi,zi)(i=1,2,…,n),利用拟合算法确定空间平面方程参数。传统的做法是建立高斯-马尔科夫(Guass-Markov)模型,采用最小二乘(least squares,LS)方法拟合平面。用LS法可以求得参数的最或然值,此时需要有一个基本假设,即偶然误差e只存在于观测向量Y中,而系数矩阵A是不受偶然误差影响的。然而,这并不符合事实,由于模型误差、人为误差、仪器误差等使得点云数据中几乎所有的观测值中都存在误差,因此,包含变量的系数矩阵A也含有误差。考虑引入总体最小二乘(total least squares,TLS)方法,建立变量误差(EIV)模型,同时考虑观测向量和系数矩阵的误差。在此基础上,根据每个点的激光反射强度定义拟合权阵,得到加权总体最小二乘(weighted total least squares,WTLS)的平面拟合方法。经实例计算证明,WTLS方法更加合理,可以得到更高精度的参数解。
二、最小二乘解算平面参数
经过预处理后得到一组平面点云数据(xi,yi,zi)(i=1,2,…,n),利用拟合算法确定空间平面方程参数。空间平面方程为

式中,a、b、c为待求参数。利用线性回归模型进行参数估计的Guass-Markov模型为
式中
LS估计准则为


单位权中误差为

三、加权总体最小二乘解算平面参数
1.EIV模型
考虑系数矩阵A中误差的EIV模型为
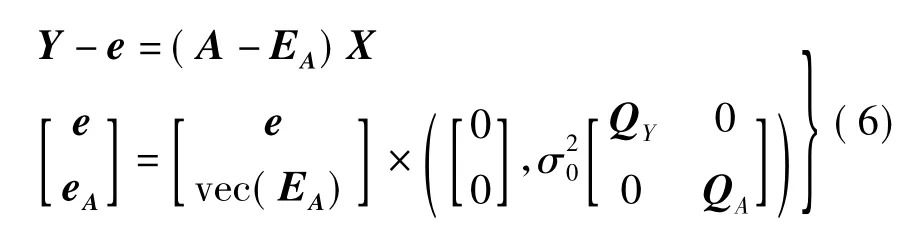
WTLS估计准则为

2.WTLS权阵的定义
在实际中,每次扫描得到的是被扫平面每个点云的一组信息,这组信息包含了扫描点云的坐标信息和激光反射强度信息,即每个点云的三维坐标和激光反射强度值。而激光反射强度与入射角度存在如下关系:E'i=E0cos αi(i=1,2,…,n) ,式中,为每个扫描点的激光反射强度;E0为垂直入射时的反射强度;αi为入射角。即入射角度越接近于90°,激光反射强度越大,点位精度越高,参与拟合的权重也应越大;相反,入射角越接近于0°,激光反射强度越小,点位精度越低,参与拟合的权重应越小[3]。通常的激光反射率是在 (0,255)之间的数值,通过相应的转换关系 Ei=(E'i×0.303 7+621.872 9)/1 244将反射强度转换为0~1之间的数值(即Ei),再将Ei作为每个点云相应的权值。假设点云在x、y、z三个方向等精度获取,对于平面靶标的系数阵列向量和观测值,有σx=σy=σz,则具体权阵形式如下
式中,P0为系数阵A的列向量权阵,P0的第三个对角元素为0,表示系数阵A中的第三列不需要改正,其余对角线元素为1,表示系数阵A中的第一、二列的数据列中的元素是等精度获取的;PY为观测值权阵;PX为A阵行向量权阵。
3.迭代法求解参数及精度评定
根据Shaffrin提出的迭代法[4]求解点云平面参数的过程具体如下。
四、实例分析
本文采用Faro laser scanner对墙面、路面数据进行扫描得到原始点云,如图1所示,具体步骤如下。
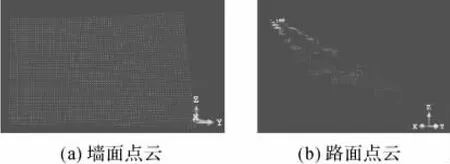
图1 原始点云
1)为避免由于直线平行于某坐标轴而出现数值问题[5],求出坐标 (xi,yi,zi)T(i=1,2,…,n) 中的三个坐标分量的最大值和最小值之差为Δx、Δy、Δz。在 Δx、Δy、Δz中,若 Δx最小,则按 x=ay+bz+c拟合;若Δy最小,则按y=az+bx+c拟合;若Δz最小,则按z=ax+by+c拟合。
2)将反射率转化为0~1之间的数值,设置阈值,滤去噪声点。
3)在点云平面中任取三个点,求出平面参数初值,计算每个点到平面的距离,将距离小于2 mm的点删除。
4)根据式(2)、式(8)组成观测方程。
5)根据式(9)~式(11)求解参数,并由式(12)~式(14)进行平差精度评定,与TLS方法和LS进行比较,得到的结果如表1、表2所示。墙面拟合的残差如图2所示。
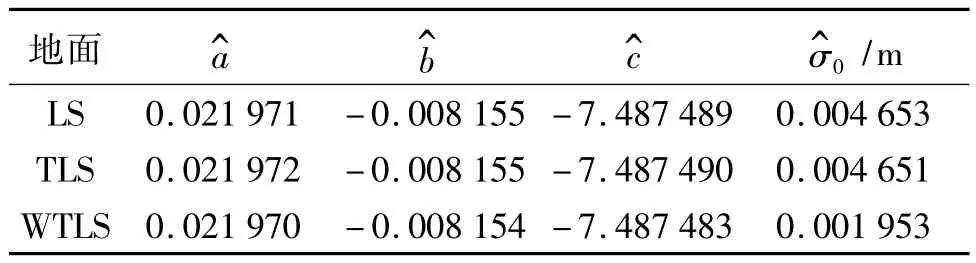
表1 墙面拟合参数及精度
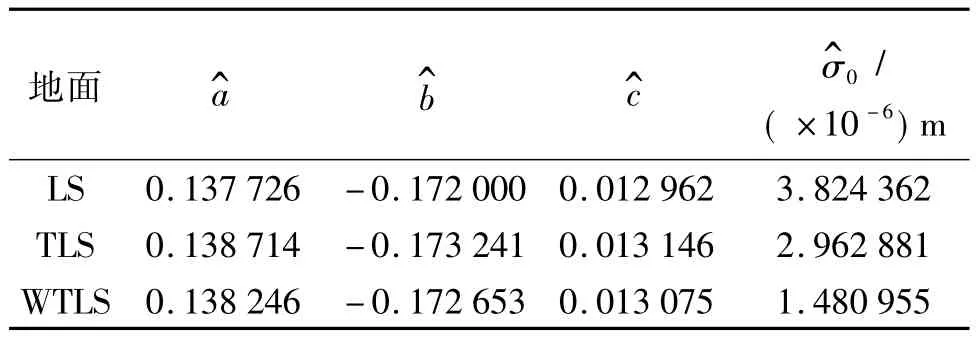
表2 路面拟合参数及精度
由表1、表2可以看出,WTLS方法拟合的单位权中误差要小于LS方法和TLS方法。墙面拟合中WTLS方法得到的精度相对LS方法和TLS方法提高了58%,路面拟合中WTLS方法得到的精度相对LS方法和TLS方法分别提高了61%和50%。由图2可以看出,LS方法仅仅修改了观测值向量,而TLS和WTLS方法则修改了系数阵和观测值,使得残差同时出现在观测向量和系数矩阵中。且引入点云的权阵,得到更加合理的拟合模型和更高精度的参数解。
五、结 论
1)由于WTLS方法建立的EIV模型对所有变量中的误差都进行了最小化约束,因此它比假设系数阵无误差的LS方法更加合理。
2)根据点云的激光反射强度不同的特点,引入行向量权阵P、PX,给出P、PX的具体形式。得到的单位权中误差小于LS方法和TLS方法,并且精度参数解更高。
3)引入列向量权阵P0,对系数阵A修改数据列而固定的常数列,并给出P0的具体形式,得到更合理的拟合模型。
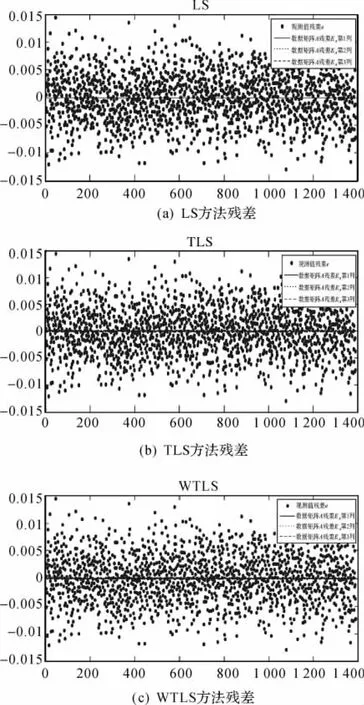
图2 墙面数据观测值残差及系数阵残差比较
[1]曹力.多重三维激光扫描技术在山海关长城测绘中的应用[J].测绘通报,2008(4):31-40.
[2]魏木生.广义最小二乘问题的理论和计算[M].北京:科学出版社,2006.
[3]张毅.地面三维激光扫描点云数据处理方法研究[D].武汉:武汉大学,2008.
[4]SCHAFFRIN B,WIESER A.On Weighted Total Least-Squares Adjustment for Linear Regression[J].Journal of Geodesy,2008,82(7):415-421.
[5]王解先,季凯敏.工业测量拟合[M].北京:测绘出版社,2008.
Applying Weighted Total Least-Squares to the Plane Point Cloud Fitting of Terrestrial Laser Scanning
YUAN Qing,LOU Lizhi,CHEN Weixian
0494-0911(2011)03-0001-03
P232
B
2010-09-03
袁 庆(1986—),女,安徽宣城人,硕士生,研究方向为大地测量数据处理。