反潜巡逻机空投鱼雷最佳投雷参数研究
2011-09-19李居伟赵志允孙明太
李居伟, 赵志允, 孙明太
反潜巡逻机空投鱼雷最佳投雷参数研究
李居伟, 赵志允, 孙明太
(海军航空工程学院青岛分院, 山东青岛, 266041)
为了提高反潜巡逻机使用航空鱼雷攻潜的命中概率, 提出了“最佳投雷参数”的概念, 分析了其影响因素和选择标准, 建立了基于蒙特卡洛法的计算模型, 仿真分析了投雷参数、目标定位精度和投雷散布对鱼雷环形搜索一周发现目标概率的影响。结果表明, 投雷参数的选择应当综合考虑目标定位精度和投雷散布, 以此确定航空鱼雷的最佳投雷参数。
航空反潜鱼雷; 反潜巡逻机; 最佳投雷参数; 命中概率
0 引言
航空鱼雷作为反潜巡逻机的主要攻潜武器, 依赖多种搜潜设备(浮标声纳和磁探仪等)提供目标指示。而搜潜设备因自身性能和使用方法的差异, 定位精度差别很大, 对攻潜效果的影响也很大。正确使用是发挥鱼雷作战能力的前提。
文献[1]给出的最佳投雷标准—鱼雷自导开机时刻发现目标的概率最大, 难以适应所有的目标定位情况。这一点将在下文的仿真分析中详细论述。文献[2]结合空投鱼雷的弹道仿真, 研究了采用文献[3]提出的3种攻潜方式时, 使用航空反潜鱼雷攻潜的发现概率问题。对向潜艇大概位置点攻击方法造成的发现概率偏低的问题, 从鱼雷设计的角度提出了改进措施。本文主要从战术使用的角度研究如何最大程度发挥鱼雷的作战能力。为此提出“最佳投雷参数”概念, 建立以目标定位精度、投雷散布和鱼雷自导作用距离等关键模型为基础的鱼雷环形搜索一周发现目标概率计算模型, 并结合投雷瞄准点进行了仿真分析。
1 最佳投雷参数
1.1 鱼雷投放参数
一般情况下空投鱼雷的入水点是指水面上确定的某一点, 而投放鱼雷的过程受多种随机因素影响, 鱼雷的入水点是个随机变量, 不可能提前准确获知。因此, 文献[1]提及的空投鱼雷 “最佳入水点”概念, 并非某一确定位置, 而是将投雷散布误差综合到了提前角误差中。因此, 该“最佳入水点”实际上是对飞机投雷瞄准点和投雷航向的综合描述。其中投雷航向是指鱼雷入水航向(飞机投放鱼雷时的航向)与目标航向的夹角, 如图1所示。在不失一般性的前提下, 为方便分析, 将目标航向设为轴正向, 则投雷航向满足0≤≤2p。
图1 投雷参数示意图
为便于描述和理解, 此处定义“鱼雷投放参数”(简称“投雷参数”)为: 反潜飞机空投鱼雷的瞄准点和投雷航向。本文将以“最佳投雷参数”的概念来代替“最佳入水点”, 研究反潜巡逻机攻潜时如何合理选择投雷瞄准点和投雷航向。
1.2 最佳投雷参数
对于攻潜武器而言, 命中概率是最终的衡量指标。“最佳投雷参数”定义为: 在该投雷参数下投放鱼雷时的命中概率最高。
将命中概率分解为=P´P。其中:P为发现目标概率;P为发现目标后能够自导命中的概率。在鱼雷剩余航程足够的情况下,P主要取决于鱼雷自身性能和目标特性。因此, 对于某一固定型号的鱼雷, 命中概率最大转化为
max{}Ûmax{P} P¹0 (1)
即搜索发现目标概率的P最大, 且鱼雷发现目标时的剩余航程足够(P¹0)。
P除了与鱼雷自身技术性能和目标特性相关外, 还取决于飞机对潜艇目标的定位精度、投雷散布情况和鱼雷投放参数。
其中, 对目标定位精度因搜潜设备的不同而有较大差别; 投雷散布取决于技术(鱼雷与降落伞制造)散布、投雷条件(速度、高度和姿态等)散布和气象(随机风等)散布。这两方面主要体现了反潜巡逻机武器和设备的性能, 其受控程度较小, 特别是目标的定位精度, 对不同的攻潜方式而言, 其可能的变化范围很大。而投雷参数则可由人为控制反潜飞机做出选择, 因此, 确定“最佳投雷参数”时, 应当综合考虑目标定位精度和投雷散布的影响。
1.3 最佳投雷参数的选择标准
为了体现投雷参数的最佳与否, 文献[1]选择以“鱼雷自导系统开启, 控制系统解脱舵管制的那一时刻鱼雷发现目标概率最大”为标准, 没有考虑搜索过程。当然, 也不可能以整个搜索过程发现目标的概率最大为标准, 因为如果在鱼雷航程的末尾才发现目标, 则剩余航程不足, 无法取得最大的命中概率。
理论上, 选择最佳投雷参数时, 应当考虑这样一个“最大搜索航程”: 这个搜索航程的起点为“搜索开始点”, 终点为“发现点”, 当在“发现点”发现目标时, 剩余航程恰好满足攻击要求, 如图2所示。在这个“最大搜索航程”中发现目标的概率P是衡量投雷参数好坏的最高标准。
图2 鱼雷入水后的基本工作过程
实际上, 上述“发现点”并不好确定, 因为鱼雷的攻击航程会随目标舷角、目标航速等情况变化。因此, 可以将“发现点”适当前移, 使得研究对象为某一确定的搜索航程, 该航程小于“最大搜索航程”。从这个角度考虑, 文献[1]则是将“发现点”前移至“搜索开始点”研究该点的发现概率, 没有考虑任何搜索过程; 本文将考虑一段典型的搜索过程——环形搜索一周, 因为, 鱼雷环形搜索一周覆盖的面积远远超过了“搜索开始点”的一个自导扇面的面积。并且发现目标之后还有足够的剩余航程。
2 目标定位精度模型
探测水下潜艇目标的设备和手段多种多样, 定位精度相差很大。本文以浮标声纳系统为例, 研究不同定位精度对最佳投雷参数的要求。
反潜飞机利用浮标声纳系统定位目标时, 往往需要多枚浮标声纳同时与目标保持接触, 进而确定目标位置。方便起见, 将这个过程简单描述为图3。

图3 飞机使用浮标声纳定位目标示意图
若=(,), 则根据误差传递的计算方法, 飞机对目标的定位误差方差满足
如上文所述, 对目标的定位一般需要多枚浮标声纳同时进行, 定位目标的误差就是多个探测声纳的误差和飞机对各声纳定位误差的综合, 不易计算, 并且受气象水文条件的影响, 声纳定位目标的误差变化范围很大。一般认为飞机使用浮标声纳定位目标的误差, 服从如图4所示的分布情况。
图4 目标水平分布
本文主要研究反潜飞机空投鱼雷的作战使用, 因此不考虑潜艇采用主动对抗的规避战术(如使用声诱饵等), 仅分析目标匀速直线运动和机动规避两种情况下的搜索发现概率。其中目标机动规避方式为“加速背雷转”: 发现鱼雷攻击(即听测到鱼雷自导信号)后, 目标潜艇加速转向, 以最小的旋回角度将鱼雷置于艇艉方向, 加速脱离。
3 空投鱼雷散布模型
忽略火控设备的射击准确度误差, 可认为投雷瞄准点即为空投鱼雷水平散布中心。投弹的水平散布服从正态分布, 且在X方向和Z方向相互独立。散布规律如下: 设飞机水平飞行投雷时的航向为X轴正向,Z轴与X轴垂直, 构成一水平坐标系。飞行高度和速度分别为(km)和(km/h), 根据飞机平飞投弹散布的经验公式, 深弹在X和Z方向的散布误差均方差,(m)可表示为
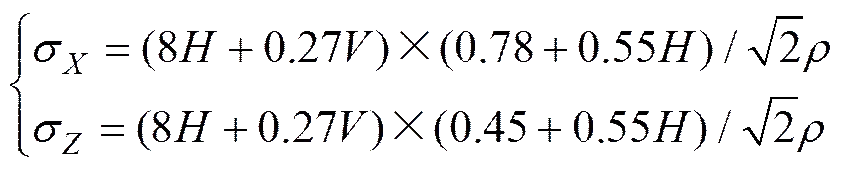
其中,= 0.4769为常数。
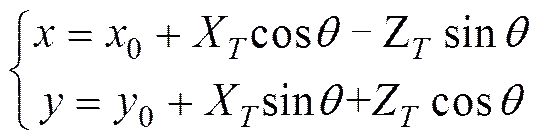
若在上述投弹散布坐标系中鱼雷入水点坐标为(X,Z), 计算时需要将该散布规律通过坐标变换投影到如图1所示的坐标系中。若投雷瞄准点坐标为(,), 则鱼雷入水点(,)可以表示为
4 鱼雷自导作用距离模型
潜艇目标强度随舷角的变化会对鱼雷自导作用距离产生影响。采用文献[5]中的方法计算目标强度

为潜艇舷角, 在图1的坐标系中与投雷航向相同,为艇艏方向(= 0)的目标强度。
利用March-Schlkin模型, 鱼雷主动声自导适合近场条件, 计算主动自导头的传播损失为公式(6)。结合主动声纳方程, 计算鱼雷自导作用距离为公式(7)。

(7)

5 投雷瞄准点的确定
投雷参数主要包括反潜飞机空投鱼雷的瞄准点和投雷航向, 在投雷航向确定的情况下, 投雷瞄准点有不同的选择方法。按照正常提前角投雷时, 可以采用以鱼雷自导开机时, 鱼雷直接遭遇目标的方法, 此时的理想情况是鱼雷尚未机动运动便命中目标; 按照有利提前角投雷时, 可以采用形心法(以自导扇面形心遭遇目标)和弦中点法(以自导扇面弦中点遭遇目标)等, 此时的理想情况是鱼雷尚未机动运动便捕获目标。本文主要研究自导开机点遭遇目标(称为瞄准方法I)和形心法(称为瞄准方法II)两种投雷瞄准点确定方法对发现目标概率的影响。
6 仿真分析
6.1 仿真计算方法
航空鱼雷使用带提前角的射击方式时, 一般采用鱼雷自导扇面形心遭遇目标法计算提前角, 也可以采用鱼雷直接遭遇目标法, 两者区别在于投雷时的瞄准点不同。同时, 在获得目标大致运动方向的条件下, 反潜飞机还可以选择不同的投雷航向。同时, 假设航空鱼雷具有类似于MK46的水下弹道: 鱼雷入水下沉到一定深度(称为入水过度深度)后, 以一定的倾角下潜到设定搜索深度, 自导系统开机, 开始向右环形搜索目标。
一次仿真过程为: 首先, 根据设定的投雷参数和投弹散布规律模拟鱼雷入水位置, 计算自导开机位置, 并模拟环形搜索; 同时, 根据水下目标定位系统的定位精度, 确定目标初始位置和运动参数; 然后, 根据目标强度和舷角的关系, 结合鱼雷主动自导的传播损失, 计算鱼雷自导作用距离, 并判定目标是否处于鱼雷自导扇面内(捕获目标)。最后, 通过蒙特卡洛仿真法, 研究不同投雷参数对鱼雷搜索发现目标概率的影响。
6.2 仿真结果
6.2.1 自导开机点发现目标概率
文献[1]的最佳投雷参数计算标准可以分为瞄准方法I和瞄准方法II两种情况。将目标航向设为0(正北), 目标分布均方差分别为200 m和500 m, 投雷航向在0~360变化, 采用两种瞄准方法的鱼雷在自导开机时刻发现目标的概率见图5和图6。
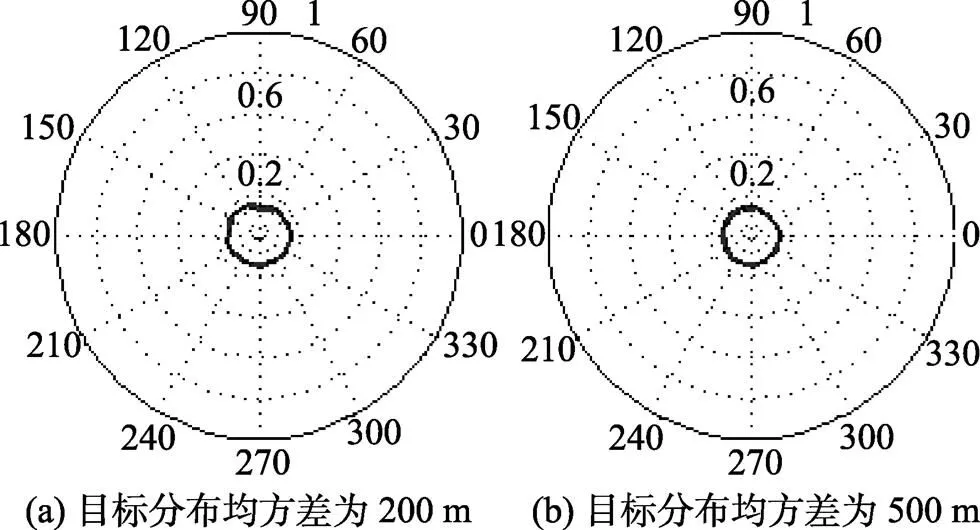
图5 目标分布均方差分别为200 m和500 m时瞄准方法I的发现概率

图6 目标分布均方差分别为200 m和500 m时瞄准方法II的发现概率
6.2.2 环形搜索一周发现目标概率
鱼雷采用自导开机后向右环形搜索, 采用MK46主动搜索的运动参数。目标初始速度为10 kn, 作匀速直线运动和加速规避运动(规避方式见上文, 旋回半径约250m, 最大速度30kn), 目标分布均方差分别为200 m和600m。其余参数不变。采用两种瞄准方法的鱼雷在环形搜索一周后发现目标的概率见图7和图8。

图7 目标分布均方差分别为200 m和600 m时瞄准方法I的发现概率

图8 目标分布均方差分别为200 m和600 m时瞄准方法II的发现概率
6.2.3 目标定位精度对发现概率的影响
目标作规避运动, 投雷航向为0, 采用不同的瞄准方法, 鱼雷环形搜索一周发现目标的概率随目标定位精度的变化如图9所示。

图9 目标定位精度对发现概率的影响
6.3 结果分析
1) 依据文献[1]给出的投雷标准以及图5和图6的仿真结果, 不论对目标的定位精度如何, 都应采用瞄准方法II, 在目标正横方向投雷为最佳。然而, 根据环形搜索一周后的发现概率(见图7和图8), 定位精度不高时(=600m), 瞄准方法I的发现概率更高。因此, 不同的目标定位精度应当采取不同的瞄准方法, 即采用图7(b)和图8(a)。
2) 从图7(b)和图8(a)中可以看到, 目标是否规避机动对发现概率的影响不大, 主要是由于潜艇速度低, 机动能力十分有限, 在鱼雷环形搜索一周的时间内机动范围很小。因此, 如果潜艇不采取主动干扰的方法很难逃脱鱼雷的搜索。同时, 两种情况下对投雷航向要求都不高, 即不同的投雷航向对发现概率的影响不大。
3) 图9显示, 当对目标的定位精度较高(<300 m)时, 宜采用瞄准方法II, 当对目标的定位精度较低(>300 m)时, 宜采用瞄准方法I。
4) 图9中采用瞄准方法I曲线前端类似抛物线过程是由投雷散布造成的。上文仿真中投雷散布均方差=119.13m,=77.528 m。当降低投雷散布时, 发现概率会有所提高。但对反潜巡逻机而言, 投弹高度和速度往往被限定在一定的范围内, 使得投雷散布的可控范围不大, 因此难以通过大幅提高投雷精度提升发现概率。
7 结束语
合理使用航空鱼雷, 能够最大限度地发挥其攻潜能力, 提高命中概率。本文从反潜巡逻机使用航空鱼雷的角度, 提出应当针对不同的目标定位精度和投雷散布情况, 合理选择投雷参数; 仿真分析了投雷参数对搜索发现概率的影响。这些方法和结果可为空投鱼雷的战术使用和反潜飞机攻潜火控系统设计提供参考。
本文仅考虑了一个典型的环形搜索过程, 而不同的鱼雷有不同的搜索方式, 不都是环形搜索。但在实际应用中, 可以采用同样的方法研究采用不同鱼雷的最佳投雷参数问题。
本文的研究没有考虑潜艇目标采取主动干扰规避鱼雷攻击对发现概率和命中概率的影响, 这种情况可以参考文献[1]给出的一些方法和结论, 进一步深入研究。该文献研究了潜艇最大航速与其规避能力的关系, 并给出了一种仿真计算方法。
[1] 王树宗, 吴晓锋.关于空投反潜鱼雷最佳入水点的探讨[J]. 海军工程学院学报, 1994, 16(4): 68-75. Wang Shu-zong, Wu Xiao-feng. Research on Optimum Incidence Point of Aerial Antisubmarine Torpedo[J]. Journal of Naval Academy of Engineering, 1994, 16(4): 68-75.
[2] Wang Zhi-jie. Maximizing the Probability an Aerial Anti- submarine Torpedo Detects Its Target[J]. Jounral of Mairne Sceince and Application, 2009, 8(8): 175-181.
[3] 孙明太. 航空反潜战术[M]. 北京: 军事科学出版社, 2003: 132-138.
[4] 杨世兴, 李乃晋, 徐宣志.空投鱼雷技术[M].昆明:云南科技出版社, 2000.
[5] 韩瑞新, 朱红胜, 李春洪, 等. 航空反潜中的吊放声纳系统仿真[J]. 解放军理工大学学报(自然科学版), 2005, 6(3): 280-284. Han Rui-xin, Zhu Hong-sheng, Li Chun-hong, et al. Simulation for Dipping Sonar System in Air Antisubmarine[J]. Journal of PLA University of Science and Technology, 2005, 6(3): 280-284.
[6] Etter C P. 水声建模与仿真[M].蔡志明, 译.北京: 电子工业出版社, 2005.
[7] 孟庆玉, 张静远, 宋保维. 鱼雷作战效能分析[M]. 北京:国防工业出版社, 2003.
[8] Armo K R. The Relationship between a Submarine's Maximum Speed and Its Evasive Capability[D]. Naval Postgraduate School, 2000.
(责任编辑: 许 妍)
Optimum Torpedo-Dropping Parameter of Anti-submarine Patrol Aircraft
LI Ju-wei, ZHAO Zhi-yun, SUN Ming-tai
(Qingdao Branch, Naval Aeronautical Engineering Academy, Qingdao 266041, China)
In order to improve the hit probability of an aerial anti-submarine torpedo, the concept of optimum torpedo- dropping parameter with influencing factors and selection criterion are presented and analyzed. The arithmetic models based on Monte Carlo are established. The influences of torpedo-dropping parameter, target locating precision and torpedo-dropping dispersion on the detection probability in a circular search cycle are simulated. The results indicate that the torpedo-dropping parameter should be selected by considering the target locating precision and the torpedo-dropping dispersion comprehensively.
aerial anti-submarine torpedo; anti-submarine patrol aircraft; optimum torpedo-dropping parameter; hit probability
TJ67; TJ631.7
A
1673-1948(2011)06-0473-06
2011-07-20;
2011-08-24.
李居伟(1981-), 男, 在读博士, 研究方向为航空反潜作战及效能评估.
