汽车EPS回正工况模糊PID控制及试验
2011-09-07赵景波贝绍轶
赵景波,贝绍轶,陈 龙
(1.江苏技术师范学院机械与汽车工程学院,江苏常州213001;2.江苏大学汽车与交通工程学院,江苏镇江212013)
0 引言
汽车转向盘回正时,转向轮主销后倾角和主销内倾角使得转向轮具有自动回正的作用.但在汽车低速行驶时易出现回正不足,高速时出现回正超调,因此,必须进行回正控制:在低速时,保持良好的回正性,在高速时,提高转向稳定性.
EPS系统回正控制的目标是改善转向回正特性,使汽车具有理想的回正性能而更好地符合汽车动态特性.车辆低速行驶时,回正曲线必须通过原点,高速行驶回正时,回正曲线允许有残留角,但该残留角不允许超过5°[1].由于EPS系统的非线性、时变性等不确定性因素,回正工况的控制存在参数修改不方便、不能进行自整定等缺点,难以达到预期的控制效果.笔者利用模糊控制和PID控制的优点,设计回正工况的模糊PID控制,根据模糊规则在线修正PID控制器参数,进行仿真分析和实车试验,同时满足回正工况中的回正要求和阻尼要求.
1 系统动力学模型
1.1 EPS系统动力学模型
EPS系统的动态模型如图1所示[2-3],机械部分主要可分为转向盘和转向轴、电动机、减速结构和齿轮齿条四部分,根据牛顿运动学定律建立各部分的动力学模型,然后根据各部件之间的相互约束关系,得到整个系统的模型[2-3].
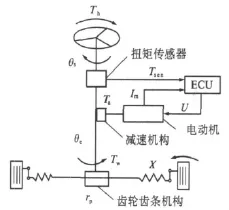
图1 EPS系统动力学模型Fig.1 Dynamic model of EPS system
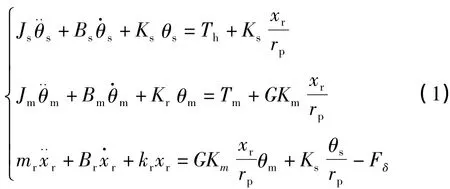
式中:Js为转向盘、输入轴的转动惯量;Bs为输入轴黏性阻尼系数;θs为输入轴旋转角;Ks为扭杆的刚性系数;Th为作用在转向盘上的转向转矩;xr为齿条位移;Jm为电动机和离合器的转动惯量;Bm为电动机黏性阻尼系数;θm为电动机转角;Tm为电动机电磁转矩;Km为电动机和减速机输出轴刚性系数;G为减速比;Mr为减速机构、小齿轮和齿条等的当量质量;Br为减速机构、小齿轮和齿条等的当量阻尼系数;Kr为小齿轮、齿条和轮胎的等效刚度系数;xr为齿条位移;Fδ为路面的随机作用力.
1.2 汽车三自由度转向模型
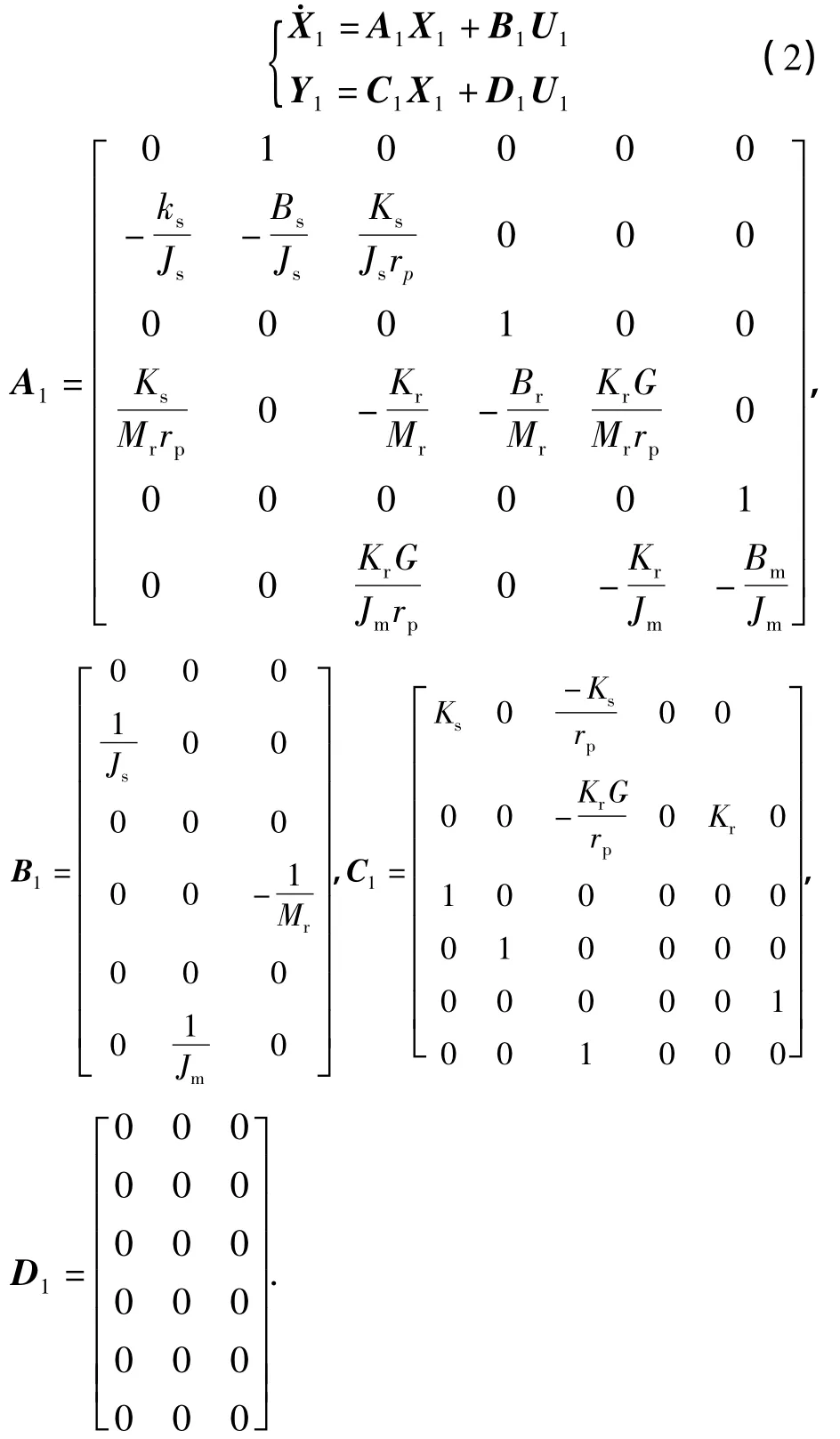
为研究EPS回正控制及其控制算法对整车性能的影响,建立汽车三自由度转向动力学模型[4],汽车高速转向的运动状态如图2所示.
根据达朗贝尔原理,取M为整车质量;Ms为悬架质量;IZ、IX为整车绕Z、X轴的惯性矩;ωr为车身的横摆角速度;IXZ为惯性积;Py1、Py2为前、后车轮侧向力;a、b 为重心至前、后轴距;Cφ1、Cφ2为前、后悬架侧倾角刚度;Df,Dr为前、后悬架侧倾角阻尼h为侧倾力臂;φ为重心的速度与绝对坐标的夹角;u为汽车速度;β为重心处的侧偏角;ωp为侧倾角速度.建立平衡方程[4],有

图2 汽车运动状态的坐标表示Fig.2 Coordinates of the car running status
取状态变量 X2=[ωrβ ωpφ]T,控制输入量 U2=[δ]T,输出量 Y2=[ωrβ ωpφ]T,得到状态空间方程,为


1.3 EPS系统回正控制结构
EPS系统回正控制结构如图3所示,模糊PID控制根据回正工况的特点和传感器信号输入,控制电机输出转矩的大小和方向,满足回正控制目标,并且保证系统获得期望的稳态精度和输入输出的动态特性、减少扰动和参数变化的影响.整车系统在回正工况及模糊PID控制下输出响应,以横摆角速度ωr、车身质心侧偏角β和车身侧倾角φ作为操纵稳定性的评价指标,反映EPS系统对整车操纵稳定性的影响.
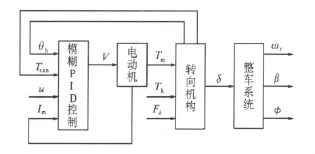
图3 EPS系统回正控制结构Fig.3 Return-to-center control structure of EPS system
2 模糊PID控制设计及分析
2.1 模糊PID控制设计
回正控制由两部分组成[5]:回正控制和阻尼控.制回正控制主要功能是提供必要的助力使转向盘能容易地回到中间位置.此时,回正控制实际上是一个PI调节器,它对目标转向盘位置(0)和实际转向盘位置θh的偏差eh进行调节,输出控制电压,使电动机将转向盘带到中位,为

式中:Vmr1为电动机的回正控制电压;eh=0-θh;Kp为比例系数;Ki为积分系数.
阻尼控制是使车辆在有阻尼的情况下回到中间位置而避免摆振.此时,根据转向盘回正时的角速度产生一控制电压,使电动机产生一阻尼转矩.通过调节阻尼系数,可以调节转向盘的回正速度,为

式中:Vmrh为电动机的回正控制电压;Kd为微分系数.
实际应用中,将回正控制和主动阻尼控制复合成一个PID回正控制算法,通过调节其系数,可获得不同效果的回正方式,即

式中:Vmr1为电动机的回正控制电压.
在EPS系统中,可利用电动机电压和电流来估计电动机转速,再通过积分环节估计转向盘转角.根据电动机等效电路及其运行特性,在电动机运行过程中,有
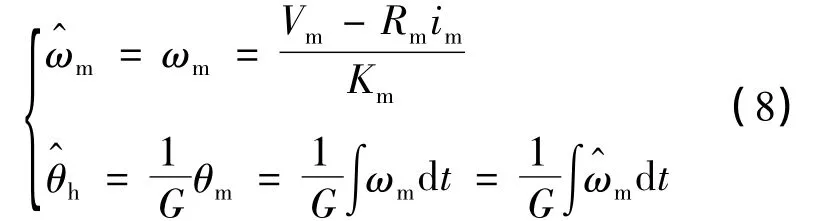
因此,有

该式结合回正控制和阻尼控制,但由于EPS系统的非线性、时变性等不确定性因素,存在参数修改不方便、不能进行自整定等缺点,难以达到预期的控制效果[6].回正工况的模糊PID控制结合模糊控制和PID控制的双重优点,根据所设计的模糊规则在线修正PID控制器参数,可提高系统的回正性能、鲁棒性能,改善驾驶员手感.
回正工况的模糊PID控制如图4所示[7],模糊控制器在线调整PID控制器的Kp、Ki、Kd参数,实现动态的优化控制.模糊PID控制器的输入为转向盘转角偏差eh及其偏差变化率,输出为Kp、Ki、Kd的变化率 ΔKp、ΔKi、ΔKd.模糊 PID 控制的作用采用模糊控制的方法,在不同增量(目标转向盘转角和实际转向盘转角的偏差)和增量变化率的情况下,确定PID控制的不同 Kp、Ki、Kd,此时模糊控制器的输入是增量和增量变化率,输出是 Kp、Ki、Kd.在响应过程的开始阶段,取较小的Ki和较大的Kd,避免积分饱和和超调;在响应过程的中期阶段,取较大的Ki和较小的Kd,提高调节精度.

图4 模糊PID控制器结构Fig.4 Structure of fuzzy-PID controller

表1 Kp的模糊控制规则表Tab.1 Rule table of fuzzy-PID controller for Kp
2.2 仿真实验及分析
在模糊PID控制下,与无控制情况进行低速回正和高速回正仿真分析.将方向盘从某一个角度放开,观察其有无回正控制及方向盘回正中心的距离.分别在车速为30 km/h和60 km/h下进行回正控制仿真,结果如图5所示.
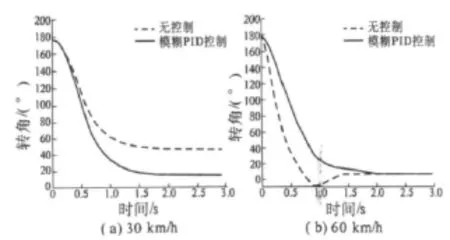
图5 回正控制比较Fig.5 Compare under return-to-center condition
结果表明,回正工况下模糊PID控制能使转向盘更快地回到接近中心位置,降低了回正不足或回正超调现象.在30 km/h时,在无控制时,1s后的残留转向盘转角约为65°,模糊PID控制时约为36°,残留转向盘转角减小;最终的残留转向盘转角在无控制时约为46°左右,在模糊PID控制时约为15°左右,低速时回正的不足现象得到改善.从回正的速度上来看,在模糊PID控制时比无控制时要迅速.因此,无论是从残留转向盘转角的大小还是从回正的速度上都可以看出车辆的回正性能得到了改善.在60 km/h回正试验中,在无控制时“摆头”现象比较明显,在模糊PID控制时的“摆头”现象大幅衰减.
2.3 实车试验及分析
以某 CH7140轿车为试验对象,设计汽车EPS系统实车试验平台,其构架如图6所示,该平台主要由控制器系统、实车系统、传感器系统和数据采集与分析系统等组成[8].
在模糊PID控制下,分别与无控制情况和原车控制情况进行低速回正试验和高速回正试验.转向盘的自动回正能力可以使汽车保持在稳定的直线行驶状态,分别在30,60 km/h下将方向盘从180°左右角度放开,观察有无回正控制及转向盘与接近中心位置的距离,如图7所示.

结果表明,模糊PID控制能使转向盘更快地回到接近中心位置,降低了回正不足或回正超调现象.在30 km/h回正试验中,在无控制时,驾驶员撒手1 s后残留转向盘转角约为57°,在原车控制时约为36°,在模糊PID控制时约为24°,残留转向盘转角减小;最终的残留转向盘转角在无控制时约为15°左右,在原车控制时约为10°,在模糊PID控制时约为6°左右,低速时回正的不足现象得到改善.从回正的速度上来看,模糊PID控制时比无控制和原车控制时都要迅速.因此,无论是从残留转向盘转角的大小还是从回正的速度上都可以看出车辆的回正性能得到了改善.
在60 km/h回正试验中,从回正时转向超调量的变化来看,在无控制和原车控制时“摆头”现象比较明显,在模糊PID控制时大幅衰减.
3 结论
(1)汽车转向盘回正时,存在回正不足和回正超调现象.EPS系统回正工况的模糊PID控制改善了低速行驶的最终残留角和稳定时间,抑制了高速行驶的“摆头”现象;满足系统的回正性能,提高了系统的鲁棒性能和驾驶手感.
(2)EPS系统回正工况的模糊PID控制对EPS系统控制策略开发、功能增强和优化以及转向操纵安全的提高具有重要的工程应用意义.
[1]赵景波.汽车EPS混杂控制系统理论、设计及实现研究[D].常州:江苏大学汽车与交通工程学院,2009.
[2]Zhao Jing-bo,Chen Long,Jiang Hao-bin,et al.Design and full-car tests of electric power steering system[C]//Computer and Computing Technologies in Agriculture.United States:SPRINGER,2008:729-736.
[3]孙立军,陈龙,赵景波,等.汽车电动助力转向系统助力特性研究及试验[J].郑州大学学报:工学版,2007,28(4):117-121.
[4]郭孔辉.汽车操纵动力学[M].长春:吉林科学技术出版社,1991.
[5]冯引安.汽车电动助力转向系统建模及控制算法研究[D].重庆:重庆大学自动化学院,2007.
[6]刘方.电动助力转向系统控制策略的研究[D].长春:吉林大学机械科学与工程学院,2007.
[7]王耀南.智能控制理论及应用[M].北京:机械工业出版社,2008.
[8]汽车工程手册编辑委员会.汽车工程手册:试验篇[M].1版.北京:人民交通出版社,2001.
