经典控制器在区域互联电网自动发电控制系统中的应用
2011-09-04董国威杨平
董国威,杨平
(上海电力学院 电力与自动化工程学院,上海 200090)
0 引言
随着全球大电网的发展,各区域电网之间的电力交换越来越多,对互联电网中各区域电网进行控制与对单区域电网进行控制是有所不同的,不但要考虑每个区域电网内部的频率,还要对区域之间的联络线进行控制。经典控制器是在日常生活和生产活动中技术最成熟、使用最广泛的控制器,因此,本文尝试使用经典控制器来对互联电网中的区域电网进行控制,包括积分控制器(I)、比例-积分控制器(PI)、积分-微分控制器(ID)、比例-积分-微分控制器(PID)及积分-双微分控制器(IDD)[1]等,比较各控制器在区域电网中的控制效果。
1 系统介绍
本文采用经典的两区域仿真控制模型(如图1所示),区域1和区域2均为2000 MW,为了模型化不同区域之间的容量情况,特别设定一个参数a12=-Pr1/Pr2=-1;区域中汽轮机和发电机速度限制为3%额定转速/min。在每个区域中,积分控制器(I)、比例-积分控制器(PI)、积分-微分控制器(ID)、比例-积分-微分控制器(PID)及积分-双微分控制器(IDD)作为研究对象,各控制器结构如图2所示。
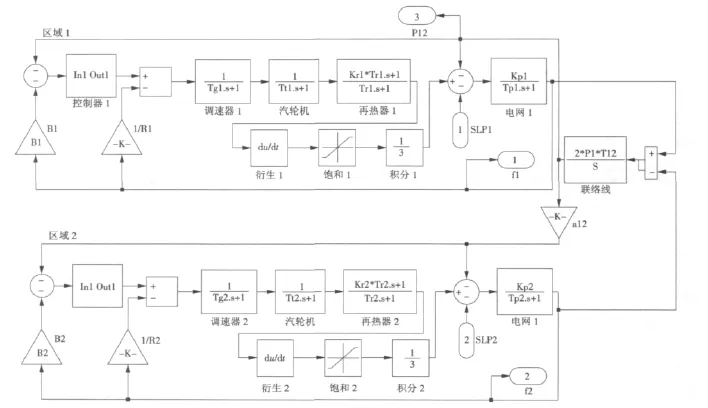
图1 两区域控制系统仿真模型
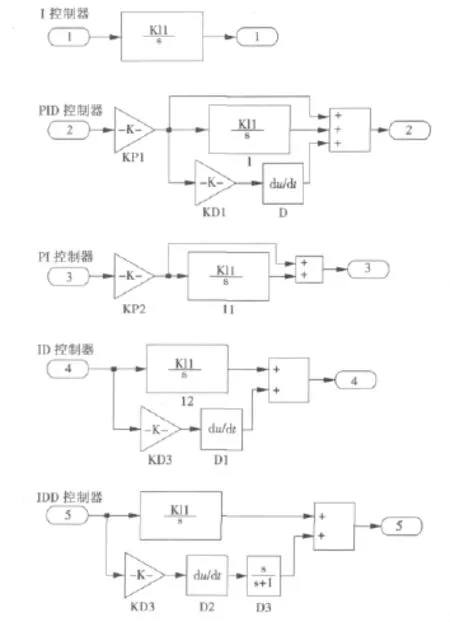
图2 控制器结构模型
依据参考文献[2]提供的数据,仿真系统中各参数为:第i区域调速器时间常数τgi=0.080s、汽轮机时间常数 τti=0.300 s、再热器时间常数 τri=10.000 s、再热器的比例系数 Kti=0.5、电网的时间常数 τpi=20 s、电网的比例系数 Kpi=120 Hz/p.u.MW,联络线时间常数τ12=0.544 s。
2 系统仿真
在本文研究的两区域电网中,设定区域调整参数R1=R2=4%、频率偏差系数B1=B2=0.425,积分控制器(I)、比例-积分控制器(PI)、积分-微分控制器(ID)、比例-积分-微分控制器(PID)及积分-双微分控制器(IDD)参数的设定见表1。其中:Kpi为区域i中PID,PI控制器的比例控制器系数;KIi为区域 i中 I,PID,PI,ID,IDD 控制器的积分控制器系数;KDDi为区域i中PID,ID控制器的微分控制器系数以及IDD控制器中的双微分控制器系数。
在区域1中,加上1%的单步负载扰动,观察区域1的频率偏差。从图3中可以看出:I,PI控制器的控制效果差不多,振荡较为剧烈;ID,IDD控制效果较好一些,振荡情况大为改善;PID控制效果最好,超调量、调整时间等性能指标都是最小的。
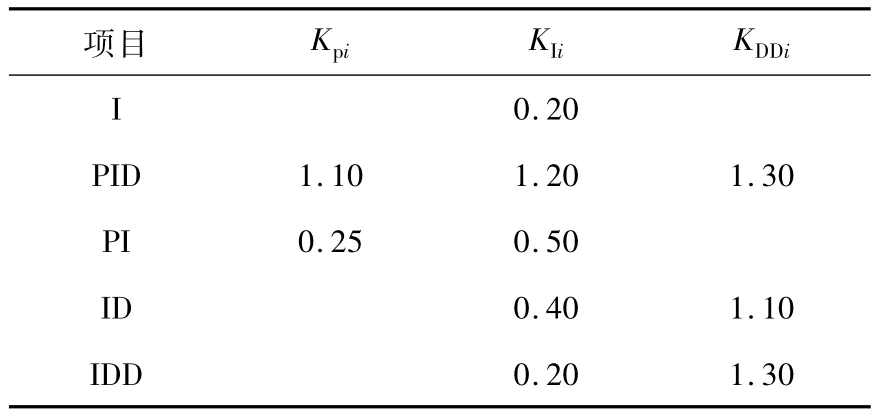
表1 控制器参数的设定
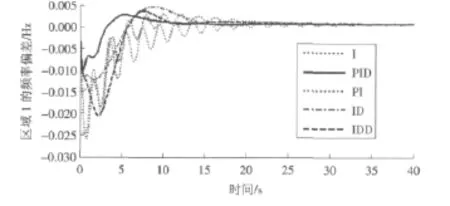
图3 区域1的频率偏差
由图4可以看出:对于联络线功率偏差的控制,I和PI控制效果较差,振荡较为剧烈;ID和IDD控制效果略好,振荡减缓;PID控制效果最好,超调量与调整时间均较小。
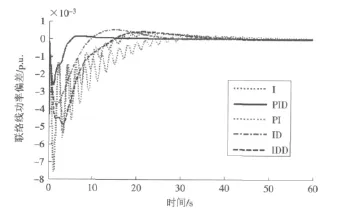
图4 联络线功率偏差
3 调速器的控制效果分析
在对控制器的控制效果进行检验时,调速的调节频率也是十分重要的一个考虑环节。如果调速器的调节过于频繁,会导致调速器加速老化,从而缩短调速器的使用寿命。因此,在仿真系统中观察调速器的控制曲线。
在图5中分别观察区域1和区域2的调速器输入情况。在2个区域中,I和PI控制器的振荡都很大,调节过于频繁。区域1中,开始时刻的脉冲幅度ID最小,IDD其次,PID最大;调整过程中的超调量IDD最小,ID次之,PID最大;调整时间为ID最短,IDD次之,PID最长。在区域2中,超调量为PID最小,ID次之,IDD最大;稳定时间为PID最短,ID次之,IDD最长。
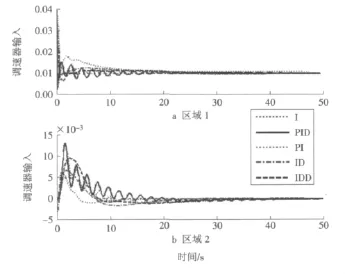
图5 区域1和区域2的调速器输入
4 结论
对积分控制器(I)、比例-积分控制器(PI)、积分-微分控制器(ID)、比例-积分-微分控制器(PID)、积分-双微分控制器(IDD)分别控制的两区域电网的自动发电控制系统进行仿真,分别从区域内频率偏差、区域间联络线功率偏差和各区域内调速器的输入信号进行分析:
(1)I,PI控制器对频率的控制和联络线功率的控制都有很大程度上的振荡,这是由于电力系统中存在有较大的惯性环节,使得控制的变化总是落后于误差的变化。在控制器中加入D控制器,能够预测误差变化的趋势,超前地对误差进行控制,从而避免被控量的严重超调,消除控制过程中的振荡。
(2)在调节过程中,由于区域1为主控区域,误差产生在此区域中,PID相对于ID,IDD控制器,增加了一个P控制器,对误差有一个放大作用,因此,调速器输入信号在开始时刻的脉冲幅值PID要比ID,IDD要大一些,超调量和稳定时间也要大一些;而在作为跟随区域的区域2中,PID控制器中的P控制器对误差的放大作用可以加快控制器对被控量的控制,因此,从调速器的输入信号来看,PID的控制效果要优于ID,IDD控制器。
(3)在仿真过程中发现,如果将图2中IDD控制器的D3控制器的实际微分环节换为理想微分环节,则调速器的输入信号在开始时刻的脉冲幅值会增大很多。因为理想微分环节的输出是一个幅值无限大、作用时间无限小的脉冲,而实际微分环节是以一个有限的最大幅值开始的、按指数规律衰减至0的缓慢脉冲信号[3-5]。
[1]J Nanda,Lalit Chandra Saikia.Comparison of Performances of Several Types of Classical Controller in Automatic Generation Control for an Interconnected Multi-area Thermal System[C]∥2008 Australasian Universities Power Engineering Conference(AUPEC'08).Sydney:Australasina Universities,2008.
[2]O I Elgerd.Electric Energy Systems Theory an Introduction[M].Second Edition.New Delhi:Tata McGraw - Hill,1983.
[3]C Concordia,L K Kirchmayer.Tie-line Power Frequency Control of Electric Power System[J].AIEE Trans,1953,72(III-A):562-572.
[4]C Concordia,L K Kirchmayer.Tie-line Power Frequency Control of Electric Power System:Part II[J].AISE Trans,1954,73(III-A):133 -146.
[5]杨平,翁思义,郭平.自动控制原理 理论篇[M].北京:中国电力出版社,2009.