考虑脚掌转动的跳跃机器人动力学与轨迹规划
2011-09-03胡胜海徐鹏邓坤秀郭彬
胡胜海,徐鹏,邓坤秀,郭彬
(哈尔滨工程大学机电工程学院,黑龙江哈尔滨150001)
随着机器人研究领域向地形复杂化、环境非结构化、任务自主化的方向扩展,要求机器人具有更强的自主性、自治性、移动性和地形适应性.在这些新的任务和形势下,相比轮式或履带式机器人,腿式跳跃机器人将越发受到重视[1].最早的跳跃机器人模型是由Raibert等研制的弹性负载倒立摆模型,即SLIP模型[2],随后的跳跃机器人的研究大多是基于SLIP模型.众所周知,SLIP模型假定系统质心位置始终保持在股关节上,而这与自然界中动物关节腿生物学特征不符.近年来,研究者正试图研制能够很好地体现动物跳跃运动原理的多关节腿式模型[3-5].但是这些机器人在建立动力学模型时都很少考虑脚掌的转动对跳跃运动的影响.
本文研制了一种由旋转关节组成的单腿平面跳跃机器人.脚掌与地面的柔顺关系设计为弹簧-阻尼模型.在存在脚掌转动的起跳相和落地相,由于足尖与地面的接触存在被动自由度,机器人模型变为欠驱动的.基于跳跃机器人等价的二连杆模型进行了跳跃运动轨迹规划,并给出了一个期望轨迹与实际轨迹非线性误差最小化的曲线方程.
1 机器人结构与跳跃运动序列
双关节跳跃机器人是一个具有2个主动关节的腿型机器人,如图1所示.机器人由3个均质连杆组成,分别为脚掌、小腿和大腿.脚掌的自由端为足尖,连接脚掌和小腿的关节是踝关节,连接小腿和大腿的关节是膝关节.每个关节由安装在连杆中心位置的直流伺服电机通过同步齿形带驱动.双关节机器人跳跃运动限制在径向平面内,因此它是一个平面跳跃机器人.

图1 跳跃机器人机构简图和Solidworks模型Fig.1 Hopping robotmodel and Solidworksmodel
建立如图1所示的惯性坐标系.足尖的初始位置标为(x0,y0),踝关节和膝关节的笛卡尔坐标为(x1,y1)和(x2,y2).关节坐标向量 θb=(θ2,θ3)T描述了机器人的相对构型.θ1是脚掌与地面之间的绝对夹角.广义坐标向量 θa=(θ1,θbT)T描述了机器人的绝对构型.每个角度按逆时针为正.脚掌、小腿和大腿的长度和质量分别为li和mi(i=1,2,3).
一个典型的跳跃运动过程包括起跳相、飞行相和落地相.双关节跳跃机器人的绝对位置是由位于质心的笛卡尔坐标(xCM,yCM)确定的.在起跳相和落地相,机器人的脚连杆与地面接触,并且CM≠0;在飞行相时机器人与地面不接触.
2 考虑脚掌转动的机器人动力学
在生物和人类的跳跃运动过程中,脚掌与地面的相互作用对跳跃性能影响很大,为了模拟这种特性,本文采用如图2所示的柔顺性模型表示双关节跳跃机器人的脚掌与地面的关系.脚掌与地面的整个接触表面由安装在足尖的固定支点和安装在踝关节处的弹簧-阻尼系统代替.
脚掌柔顺性模型作如下假设:
1)整个脚掌与地面的接触表面由足尖接触和踝关节接触代替.
2)足尖与地面的接触作为一个固定支点,跳跃机器人在这一点上不打滑、弹回和越过等.地面反力的垂直分量为正,水平分量与垂直分量的比值不超过静摩擦系数[6-8].
3)踝关节与地面接触作为一个弹簧-阻尼系统,在这点跳跃机器人能弹回或者透过.

图2 脚掌柔顺性模型Fig.2 Foot compliancemodel
2.1 起跳相和落地相的拉格朗日动力学
在起跳相和落地相,机器人质心的位置[xCM(θa),yCM(θa)]能通过足尖位置计算出来:

这里,mi和(xCMi,yCMi)为第i个连杆质心的质量和位置.因此,双关节跳跃机器人质心的线速度为

考虑脚掌转动,忽略各关节摩擦,由拉格朗日方程描述双关节跳跃机器人动力学模型的起跳相和落地相[9].机器人动力学模型有如下形式:


式中:MS是一个关于足尖的3×3惯性矩阵,VS是一个包含哥式力和离心力的3×1向量,GS是一个3×1的重力项.τS是应用到跳跃机器人的广义力和力矩向量,外力矩为式中:下标s代表起跳相和落地相,b代表关节坐标向量代表足尖地面关节.uS=[τ2τ3]T分别是作用在踝关节和膝关节扭矩.ut=τ1是由作用在踝关节-地面接触点的竖直方向地面反力在足尖-地面接触点上产生的扭矩:

式中:k和D是踝关节-地面接触的弹簧常数和阻尼系数.式(4)中:
在起跳相和落地相,跳跃机器人必须满足下面3 个约束条件[10]:
1)作用在机器人足尖处的地面反力的竖直分量大于等于零,即

当且仅当在起跳相末时和落地相初始时刻,Ny=0.Ny为地面反力的竖直分量CMi为各个连杆质心加速度的竖直分量,其值可由θi的值求出.
2)各关节的输入力矩为对称有限值,即

3)碰撞发生在飞行相末时足尖接触地面时刻.假定碰撞的瞬时过程为一个完全非弹性碰撞过程,即在碰撞后:足尖速度瞬间变为零,关节速度瞬间改变[11],机器人的姿态保持不变.碰撞之后,足尖-地面接触当做是理想支点.碰撞前后的位置和速度分别用“-”和“+”标记.利用文献[11]的模型可得到碰撞后的关节速度为

2.2 飞行相的拉格朗日动力学
对于飞行相,广义坐标向量考虑为 θf=(θ1,θTb,xCM,yCM)T.则飞行相动力学模型为

式中:Vf是一个包含科氏力和离心力的5×1向量,Gf是一个5×1的重力项,Df为

式中:I2×2是2×2单位矩阵,Mf(θb)是关于质心的跳跃机器人惯性矩,可以通过下式[6]求得

外扭矩为

式中:下标 f代表飞行相,a代表绝对姿态.uf=[τ2τ3]T是在飞行相时,分别作用在踝关节和膝关节扭矩.在飞行相,双关节跳跃机器人的质心按照抛物线轨迹运动,其约束条件为:
1)质心遵守牛顿第二定律,即

3 轨迹规划
轨迹规划过程[12]是基于跳跃机器人二连杆等价模型,如图3所示.在等价模型中,把脚掌当做一个连杆,踝关节到跳跃机器人剩余连杆质心的距离当做另一个连杆.机器人剩余连杆质心的笛卡尔坐标(xCM0(θb),yCM0(θb))是建立在脚掌坐标系(Xf,Yf)上的.考虑跳跃机器人的机械结构,关节坐标向量 θb的合理范围为 -1.571 ≤ θ2≤ 1.047,-2.094≤θ3≤2.618.

图3 包含脚掌的跳跃机器人二连杆等价模型Fig.3 Two-link equivalentmodel of the hopping robot
3.1 起跳相轨迹规划
在起跳相,(xdCM0(t),ydCM0(t))采用以下形式:

3.2 飞行相轨迹规划
在飞行相机器人的质心按照式(14)运动.关节坐标向量θb改变基于足尖坐标(x0,y0)的机器人质心位置.竖直方向期望轨迹ydCM0(t)为

式中:ηd是期望的跳跃高度,tf为期望的跳跃时间,yd0(t)是y0的期望轨迹,如图4所示.同样,水平方向期望轨迹xdCM0(t)为式中:δd为期望的单位跳跃远度,xd0(t)是x0的期望轨迹,如图4所示.xCM(0)、CM(0)、yCM和CM(0)是起跳相末时的值.ηd、δd和tf的选取要满足在飞行相末时 θ1>0.


图4 飞行相期望轨迹Fig.4 Desired trajectory of flight phase
3.3 落地相轨迹规划
落地相的初始位置是飞行相的末时位置,同时由于在飞行相末时发生碰撞,由式(9)知,落地相的初始速度瞬时改变.落地相期望的形位变量θdj(t)(j=2,3,4)为常数,且满足:

4 仿真与实验
4.1 仿真
综合式(15)~(17),可得如下结论:跳跃运动的轨迹是由不同阶段期望运动轨迹θb和θ·b相互耦合确定的.而这些参数的选择又是由 Cx、Cy、ηd、δd和tf间接决定的,且必须满足跳跃运动轨迹约束条件(7)、(8)、(9)、(14)等.在本文中选择跳跃运动过程中期望运动轨迹参数误差最小化作为优化方程,即

采用MATLAB's LSQNONLIN函数求得期望步态θdb(t).满足上式非线性误差最小化原则求得的θdb位于跳跃机器人合理的形位参数范围内,采用形如四阶多项式函数描述的θdj(t),即),期望运动过程中的误差精度能达到10-4m.

在仿真计算中,与机器人有关的参数为:l1=0.19 m,l2=0.15 m,l3=0.14 m,m1=600 g,m2=800 g,m3=750 g,关节最大约束转矩τmax=80 N·m踝关节-地面接触的弹簧常数k=4 000和阻尼系数D=0.8.仿真结果所得到的非线性误差最小化的运动轨迹是由如下参数值所决定:Cx=1.5 m/s,Cy=2 m/s,ηd=0.25 m,δd=1.8 m/s 和 tf=250 ms.在此参数下的踝关节和膝关节的跳跃过程运动轨迹如图5所示.

图5 关节运动轨迹Fig.5 Jointmotion trajectory
仿真过程中的踝关节扭矩和膝关节扭矩如图6所示.仿真中,踝关节扭矩最大值为76.48 N·m,膝关节扭矩最大值为-52.64 N·m,且膝关节扭矩的最大值在踝关节扭矩最大值之后出现.仿真结果说明了踝关节扭矩对跳跃性能影响较大.

图6 最佳轨迹的关节力矩Fig.6 Joint torques of optimumtrajectory
在t=0.33 s时,跳跃运动进入落地相.此时,踝关节扭矩和膝关节扭矩发生瞬间改变,导致踝关节和膝关节的速度和加速度在此刻都发生瞬间变化.
跳跃仿真过程中,足尖与地面的绝对角度θ1及被动扭矩τ1的变化曲线如图7所示.在仿真刚开始时,由于主动关节电机扭矩的作用,机器人对地面有冲击作用力,在足尖处产生被动扭矩τ1,其最大值为64 N·m.这个被动扭矩对机器人的跳跃起积极作用,在仿真中希望其值越大越好.在t=0.03 s时,机器人脚掌开始发生转动.t=0.33 s落地相发生后,由于落地冲击,使θ1<0,在足尖处产生被动扭矩τ1,其最大值为106.5 N·m.这个被动扭矩造成机器人的落地姿态不稳定,在仿真中希望其值越小越好.
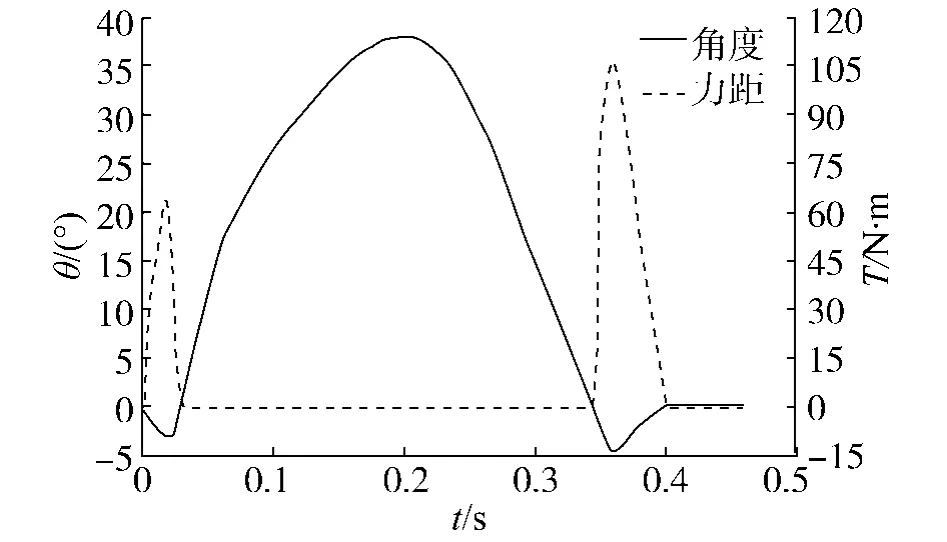
图7 脚掌与地面的角度及扭矩Fig.7 Joint angle and torques between foot and ground
4.2 样机实验
双关节平面跳跃机器人的机械结构用铝板连接.该跳跃机器人的驱动电机型号是CBL3570A,其技术参数如下:额定电压为 18 V,额定转速为7 500 r/min,额定功率为60 W.配套编码器为1000线,减速比为19.该系统采用DSP进行控制,主控芯片是TI公司的TMS320F2812.机器人跳跃实验是在一层橡胶垫上进行的.橡胶垫能防止单腿跳跃机器人起跳时打滑,并在机器人落地时提供阻尼器吸收落地冲击能量.为了增加直流伺服电机的爆发性,在机器人踝关节和膝关节处增加拉簧,所以跳跃实验比仿真所需时间少.图8为一组跳跃运动过程的图片.实验测得,当 θ1=30°~35°时,机器人离地,此时跳跃机器人能获得最大跳跃高度为0.15~0.20 m,跳跃距离为0.25 ~0.28 m.

图8 一组跳跃运动图片Fig.8 A groupof hopping motion
5 结束语
本文针对双关节跳跃机器人模型,考虑脚掌对跳跃运动的影响,采用拉格朗日方法建立机器人在支撑相和飞行相的动力学模型.以期望运动轨迹参数误差最小化为目标,基于机器人二连杆等价模型,采用四阶多项式规划了机器人跳跃运动步态.仿真和样机实验结果为机器人的系统优化和运动控制提供了重要依据.同时,本文研究结果对解决如腿式跳跃机器人这类混杂非线性欠驱动系统的动力学与轨迹规划问题具有指导意义.
[1]徐兆红.腿式跳跃机器人运动规划与稳定性恢复研究[D].上海:上海交通大学,2009:2-16.XU Zhaohong.Study onmotion planning and stability recovery for legged jumping robot[D].Shanghai:Shanghai Jiao Tong University,2009:2-16.
[2]RAIBERTmH.Legged robots that balance[M].Cambridge,MIT Press,1986:26-45.
[3]ZEGLIN G J.Uniroo:a one legged dynamic hopping robot[D].Cambridge:Massachusetts Institute of Technology,1991:78-93.
[4]HYON SH,MITA T.Development of a biologically inspired hopping robot Kenken[J].IEEE International Conference on Robotics and Automation,2002:3984-3991.
[5]SUNG S,YOUmY.Landing motion control of articulated legged robot[J].IEEE International Conference on Robotics and Automation,2007:3230-3236.
[6]CHEVALLEREAU C,WESTERVELT E R,GRIZZLE J W.Asymptotically stable running for a five-link,four-actuator,planar bipedal robot[J].Int JRobot,2005,24(6):431-464.
[7]WESTERVELT E R,GRIZZLE JW,KODITSCHEK D E.Hybrid zero dynamics of planar biped walkers[J].IEEE Trans AutomControl,2003,48(1):42-56.
[8]WESTERVELT E R,GRIZZLE JwC.CHEVALLEREAU C.Feedback control of dynamic bipedal robot locomotion[J].Boca Raton,FL:CRC.2007,43(4):142-153.
[9]SPONG mW,VIDYASAGAR M.Robot dynamic and control[M].NewYork:Wiley,1989:56-89.
[10]杨煜普,耿涛,郭毓.一种新型翻转跳跃运动机器人的运动结构与轨迹规划[J].上海交通大学学报,2007,37(7):1110-1113.YANG Yupu,GENG Tao,GUO Yu.Structure and trajectory planning of a novel flipping robot[J].Journal of Shanghai Jiao Tong University,2007,37(7):1110-1113.
[11]HURMUZLU Y,MARGHITU D B.Rigid body collisions of planar kinematic chains with multiple contact points[J].Int JRobot,1994,13(1):82-92.
[12]李东洁,邱江艳,尤波.一种机器人轨迹规划的优化算法[J].电机与控制学报,2009,13(1):123-127.LIDongjie,QIU Jiangyan,YOU Bo.Optimal algorithmfor trajectory planning of the robot[J].Electric Machines and Control,2009,13(1):123-127.
