泡状流近焦深度内微气泡数密度的测量
2011-08-28曹丹,郑源
曹 丹,郑 源
(河海大学能源与电气学院,江苏南京210098)
微小气泡水被广泛应用于水的净化、污水处理、工业品的洗净等方面.目前,直径数十微米的微小气泡的测量大体分为光散乱法、音响法和图像法.光散乱法是通过检出气泡经过激光照射区域所散射的光来测量气泡直径和气泡数[1-2],但微小气泡和固体粒子的辨别非常困难,因此不能使用.音响法是利用一定周波的声波在气泡水中传递时和一定直径的气泡共振衰减,由周波数和衰减量来确定气泡直径和气泡数[3-4],但该方法还不成熟.
近年来,随着计算机技术的迅猛发展,基于单CCD摄影机显微摄像从而获取微气泡图像的方法被广泛用于微小气泡的测量.笔者基于在足够长时间内必有不同大小的泡状流气泡流经光学系统焦平面这一前提,提出了一种依据试验获得的近焦深度内静止气泡的最小灰度标准差与最大灰度标准差之比与直径的关系来预测位于所给深度区域内的泡状流气泡数密度的有效方法.通过实例证明,该方法能合理、有效地度量单位体积的气泡数即气泡数密度.
1 测量装置
采用基于单CCD摄像机的微气泡图像测量方法[5],该方法是集显微动态摄像法与计算机技术于一体的一种先进的测量手段.试验所使用的微气泡测量装置如图1所示,图像采集设备主要由照度为1.25×107Lx的卤素光源1,有效像素768(H)×493(V)及扫描面积 6.4(H)mm ×4.8(V)mm 的CCD 和长223.5 mm、倍率(0.75-4.5)×3 的光学变焦镜筒4,以及1/60-1/10 000 s的摄影控制器7和三维可调支架5组成.将泡状流微气泡水3密封于透明的容器内,则多数气泡依附在容器内壁处.沿进深依次50 μm间隔调整CCD位置对容器内的气泡进行摄影,获得不同进深的静止气泡图像,展现在电脑显示屏8上,并且以avi文件格式保存于电脑硬盘中.由于微小气泡生成装置所生成的气泡很小(数十微米)、气泡数很多(200~600个/mm3),为了捕获微小气泡,设置了4.5倍的摄影镜头再加上3倍的辅助镜头.CCD摄像机的快门速度设置为1/10 000 s,变焦倍率为13.5 倍.

图1 微气泡测量装置
2 背景处理和杂质去除
2.1 背景噪音的处理
由于照度不均匀[6-7],图像背景的各像素值也不均匀,因此需首先清除背景.考虑到光源照度和不同工作状况下泡状流中气泡的大小不尽相同,使得图像背景也千差万别,故选用能较好保持图像像素值和大的亮区域基本不受影响的 Stanley[8]算法来估计图像背景.即经背景除去后原背景灰度为0的各像素灰度不变而背景灰度不为0的各像素灰度则减少1个背景灰度值.
通常由CCD摄像机经图像板录入到计算机上的数值图像均含有各种噪音,因此在从气泡图像获取信息前须除去噪音.由于图像噪音的类型往往未知,而且有的难以用数学给予描述.故通常对一般性的噪音进行处理.采用3×3局部平滑法,即

式中:gi,j为噪音除去后的像素灰度;fi,j为噪音除去前的像素灰度;下标(i,j)为像素位置;wk,l为权重系数,其矩阵

经平滑处理后大部分噪音被除去,信噪比提高.余下的噪音大都是小幅度的谐波,通过选取一定的阈值即可滤去.
2.2 气泡与杂质的识别
由于摄像区域内的微气泡水移动速度非常快,CCD摄像机的快门时间又很短等原因,需对重叠气泡进行分离和分割[5].依据物像形心到边缘的最小距离与最大距离之比是否小于气泡像形心到边缘的最小距离与最大距离之比UR[9]来识别杂质和远离焦平面区域200 μm以外的物像.

式中d0为焦平面上的气泡直径.
3 静止微气泡的进深特征
由于需求解近焦深度区域泡状流气泡,因此不能直接将它们作为进深识别的标定物.对此,借助于研究静止微气泡在近焦深度区域内的特征来预测该区域内的泡状流气泡.由图1装置获得的不同进深的序列静止气泡图像如图2所示.各图像的灰度标准差[10]依次为:42.5,50.6,57.4,60.5,59.5,56.5,50.3.由图可见,灰度标准差具有最大值60.5的图2(d)最清晰,气泡像边缘的发散最低,可近似看作位于焦平面的气泡图像.

图2 依次相隔50 μm间隔的各静止气泡图像
通过不同工况下的数十次静止气泡水的获取与测量可得不同大小的气泡在焦平面和不同离焦面的气泡像特征,如图3所示.令焦平面为进深z的0点,而z从物方离焦为负,像方离焦为正.
由图3(a)和图3(b)可见,在焦平面上,气泡灰度与灰度标准差,直径与灰度标准差都只是统计意义上的线性关系,不过相关程度较高而已.由图3(c)可见,在焦平面上气泡直径近乎最小,且它随离焦距离的变化不大.由图3(d)可见(下方图例数字为焦平面上的直径),焦平面上灰度标准差最大,离焦后变小,但变化幅度不尽相同.
由图3可知,气泡大小对灰度标准差有显著的影响,考虑到泡状流气泡的衍射与静止气泡是不相同的,则泡状流气泡灰度和灰度标准差以及在进深区域的分布也会不同.因而,很难直接将静止气泡的特征参数用于泡状流气泡的进深识别.如果将近焦深度限于很小的范围时,可近似认为近焦深度区域内焦平面与离焦面上的气泡灰度标准差之比不随气泡衍射的变化.另外,气泡能被识别的有效深度大都位于 -100~100 μm的区域内,故以 Δz=200 μm长度的水平线交静止气泡进深与灰度标准差的关系曲线fd(z)于 2点 stdDev1=fd(z1)和 stdDev2=fd(z2),并满足 stdDev1=stdDev2,z1<0 和 z2>0.最终得满足上述条件各气泡的最小灰度标准差与最大灰度标准差之比stdRatio与焦平面上的气泡像直径d0的关系(图4,样本数为40),其回归方程为:

图3 静止气泡的特征

因相关系数r=0.635,依据F检验法

因此,回归方程具有显著的意义,它的剩余标准差为 0.072.

图4 气泡直径对灰度标准差之比的影响
4 测试实例
由式(3)得泡状流气泡在200 μm近焦深度区域内的最小灰度标准差为

考虑到无法识别位于焦平面的泡状流气泡直径,且泡状流气泡直径随进深的变化较小,在stdRatio计算中d0取泡状流气泡的直径.此时,若泡状流气泡的灰度标准差stdDev≥stdDevmin,则视为该气泡位于200 μm近焦深度内.
图1所示装置的某次试验视频中随机抽取92幅图像,按文中方法进行处理获得12 349个物像,由式(2)剔除杂质和远离近焦深度200 μm以外的物像(杂质和气泡)后余1 029个气泡.其中位于200 μm近焦深度内的气泡数为398个,而位于近焦深度外附近为632个.
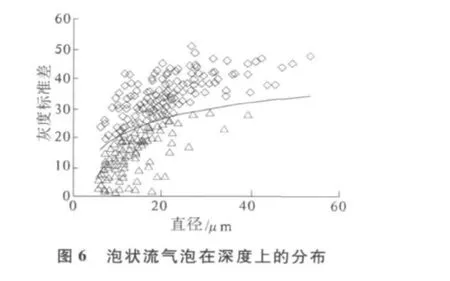
图像面积为640 ×480/1.863 2=88 510.64(μm2).则气泡密度为398/88 510.64/200/92=2.44 ×10-7=243(个/mm3).又200 μm近焦深度内的气泡直径分布如图5所示.另外,在图6中直观地给出了200 μm近焦深度内、外附近的气泡直径与灰度标准差的分布.图内曲线为200 μm近焦深度内、外气泡的分界线,即stdDevmin,该曲线以上为200 μm近焦深度内的气泡,反之则为该区域外的气泡.可见该方法可以有效识别200 μm近焦深度区域的气泡数目.

5 结语
在实际应用中泡状流气泡的衍射与静止气泡是不相同的,泡状流气泡灰度和灰度标准差以及在进深区域的分布也会不相同.所以很难直接将静止气泡的特征参数用于泡状流气泡的进深识别.将近焦深度限于很小的范围时,可近似认为近焦深度区域内焦平面与离焦面上的气泡灰度标准差之比不随气泡衍射变化.因此,基于不同大小的泡状流气泡在足够长的摄影时间内定会流过光学系统焦平面这一特征,从统计学上建立了确定流经焦平面的泡状流各直径气泡的灰度标准差方程,通过200 μm近焦深度上各直径气泡的灰度标准差与焦平面上的气泡灰度标准差之比来预测200 μm近焦深度内气泡的数目.通过实例证明,该方法能合理有效地度量单位体积的气泡数即气泡数密度.
[1] BILLET M L.Cavitation nuclei measurement with an optical system[J].J Fluid Eng ASME,1980,108:366 -372.
[2] TANGER H,WEITERDORF E A.Applicability test for the phase doppler anemometer for cavitation nuclei measurements[J].J Fluids Eng ASME,1992,114:443 -449.
[3]高川真一.音響減衰率からの気泡分布推定方法に関する研究(第1報:理論的研究)[A]∥日本造船学会論文集[C],1987,162:41-51.
[4]高川真一.音響減衰率からの気泡分布推定方法に関する研究(第2報:実験的研究)[A]∥日本造船学会論文集[C],1989,164:66-73.
[5] Zhang Rongsheng,Fujikawa Shigeo,Chen Cichang.Separation and segmentation for recognition and measurement of overlapped bubbles in plane images[J].Journal of Information and Computation Science,2005,2(4):815 -828.
[6]于殿泓.图像检测与处理技术[M].西安:西安电子科技大学出版社,2006:145-154.
[7]宋巨龙,钱福才.基于黄金分割的全局优化方法[J].计算机工程与应用,2005(4):94-95.
[8] Stanley R S.Biomedical image processing[J].IEEE Computer,1983,16(1):22 -34.
[9] Fujikawa Shigeo,Zhang Rongsheng,Hayama Shinji,et al.The control of micro-air-bubble generation by a rotational porous plate[J].International Journal of Multiphase Flow,2003,29(8):1221 -1236.
[10]曹丹,张蓉生.小气泡直径与灰度标准差的关系研究[J].华北水利水电学院学报,2010,31(6):133 -135.
[11]田涛,潘俊民.基于散焦图像深度测量的一种新方法[J].机器人,2001,23(1):15 -19.
[12]赵新,余斌,李敏,等.基于系统辨识的显微镜点扩散参数提取方法及应用[J].计算机学报,2004,27(1):140-144.
[13]赵新,孙明竹,卢桂章,等.基于显微图像处理的微操作工具深度信息提取方法[J].自动化学报,2007,33(9):917-923.
