EPS试验台模糊PID控制器设计
2011-08-26车江鸽骆艳洁麦云飞
车江鸽,骆艳洁,麦云飞
CHE Jiang-ge,LUO Yan-jie,MAI Yun-fei
(上海理工大学 机械工程学院,上海 200093)
0 引言
EPS试验台是为了测试EPS的性能参数等而开发的机电一体化测试系统。试验内容包括转角实验,功能实验,转向力特性实验,输入输出力矩实验等。
试验台设计初期采用常规的PID控制算法,传感器等硬件采集到所需的过程变量,输入程序后,根据人工预设的Kp、Ki和Kd三个常量计算出最终控制量,再输出到相应的控制硬件中来进行控制。在实际应用中发现,EPS试验台中采用PID控制算法时,能够实现精确控制曲线的PID参数很难调节,实际上,整个调试过程中,在PID参数调整上花费了大量时间。尤其是试验台还在调整磨合的情况下,更换部分元件就需要调整一次PID参数。
为了使EPS试验台达到技术要求,并缩短调试周期,考虑将系统中使用的常规PID控制算法改为模糊PID控制算法。
1 EPS试验台系统构成
EPS试验台主要由液压伺服系统、测控系统、电控系统和机械系统组成。
液压伺服系统作为整个测试系统的动力来源和执行机构;测控系统是EPS试验台的关键,软件部分的主程序基于NI LabVIEW编写,主要实现数据采集和发生、执行元件控制、数据分析、人机交互、数据记录和状态监控等操作。数据的采集和发生使用NI的PCI-6221和PCI-6601多功能数据采集卡。EPS试验台硬件系统组成如图1所示。
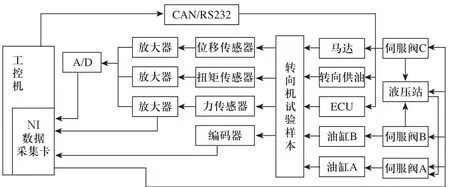
图1 EPS 试验台硬件系统组成
2 模糊PID控制算法的构建
PID控制算法的增量表达形式如下:
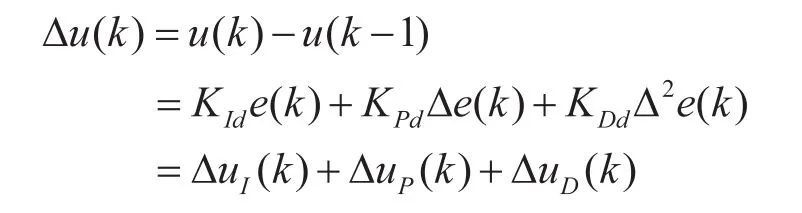
式 中,Δ2e(k)= Δ2e(k)-Δe(k-1)。KPd=KP、KId=KPTd/TI、KDd=KPTd/TD分别为相应的比例、积分和微分增益常量。
由上式可知,模糊PID控制器的几种可能形式有:1)e、Δe同时作为模糊控制器和PID控制器的输入,模糊控制器的输出KP、KI和KD作为PID控制器的参数。如图2(a)所示。 2)由线性PID控制器和SISO模糊控制器构成的模糊PID控制器,模糊控制器的输入和输出分别为e (k)和ef(k)。如图2(b)所示。3)分别设计模糊控制器和PID控制器,误差较大时使用模糊控制器,误差较小时使用PID控制器。如图2(c)所示。4)由模糊P+模糊I+模糊D控制器构成的模糊PID控制器,控制器的输入和输出分别为e和ΔuP、Δe和ΔuI、Δ2e和ΔuD。如图2(d)所示。
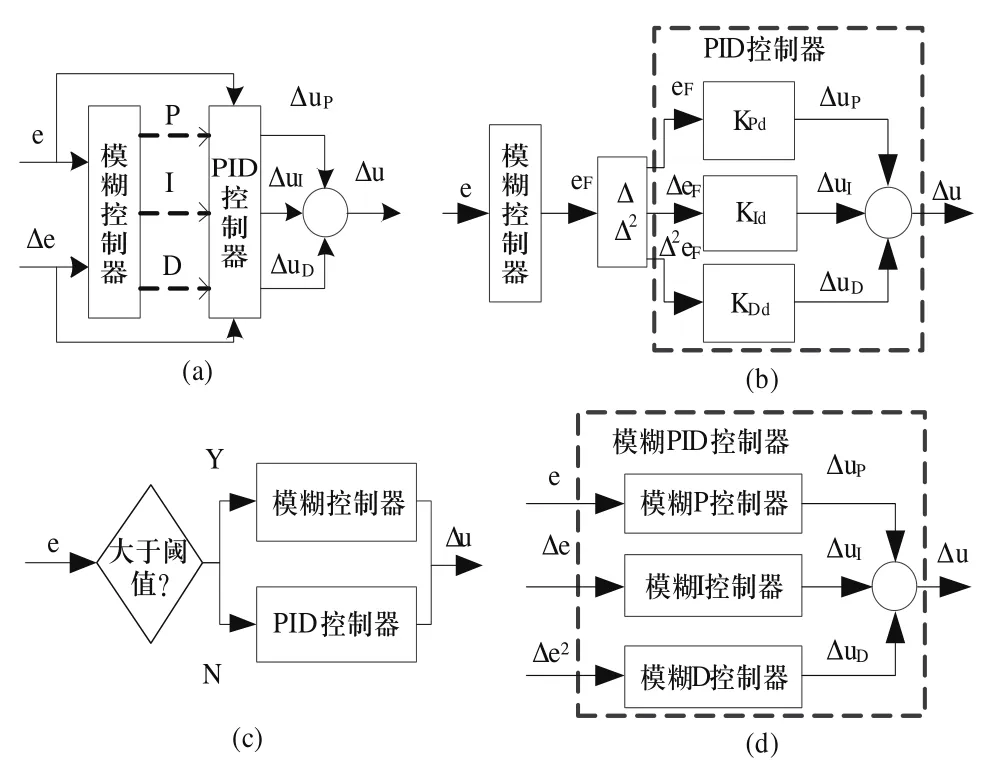
图2 模糊PID控制器的四种形式
考虑到开发周期,以及系统负荷,本文选用第一种形式。即将偏差e (t)及Δe (t)作为模糊控制器输入,输出量为KP、KI和KD。算法离散变换后,模糊控制器的输入表达为E和EC。
选用第一种形式时,E和EC下的被控过程对Kp、Ki、Kd的整定要求如下:
1)|E|很大时,无论EC大小,为使系统有良好的快速跟踪性能,应取较大的Kp,同时为避免积分饱和,可取较小Kd。2)若E ·EC>0,则说明|E|在变大。|E|较大时,应取较大Kp使|E|快速减小,同时取中等Kd,较小的Ki保证系统动态性能、稳态性能;|E|较小时,可取中等Kp以改变E变化趋势,同时取较小Kd和较大Ki避免系统振荡。3)若E ·EC<0,说明|E|在减小。|E|较大时,可取中等Kp迅速减小|E|,同时取较小Ki和中等Kd以提高系统动态性能、稳态性能;|E|较小时,可取较小Kp,同时取较大Ki和较小Kd。
3 控制算法的LabVIEW实现
本文软件开发平台为NI公司的虚拟仪器软件LabVIEW 2010,同时安装PID and Fuzzy Logic Toolkit工具包。
3.1 模糊控制器的设计
在LabVIEW主界面下,可通过菜单栏工具Control Design and SimulationFuzzy System Designer,进入模糊逻辑的图形设置界面进行输入、输出变量论域范围和各变量隶属函数以及模糊规则的设计,步骤如下:
1)模糊控制器采用“二输入三输出”形式设计,输入变量取E和EC,输出变量取KP、KI和KD。E、EC、KP、KI、KD的模糊集合取{负大,负中,负小,零,正小,正中,正大},记为{NB,NM,NS,ZE,PS,PM,PB},量化到[-6,6]的论域中。输入和输出的模糊隶属函数均取三角隶属函数,解模糊方法取中位数法。
2) 依据上文所述KP、KI、KD整定要求,进入Rule标签,逐条添加“IF 'E' IS 'NB' AND 'EC'IS 'NB' THEN'KP' IS 'PB' ALSO 'KI' IS 'NB' ALSO'KD' IS 'NB'”形式的模糊控制规则共计49条。调试过程中,可根据实际情况对某条模糊规则进行调整。
3)设置完成后,进入Test System标签,对设计的模糊控制器输出特性进行初步测试和分析,验证控制规则是否完备,是否有规律冲突等。
全部完成后,将设计好的模糊控制器保存为后缀名为fs的文件fpid.fs,为下一步在LabVIEW测控程序中调用做准备。
3.2 模糊控制器子VI设计
EPS试验台测控系统可实现人机交互界面、多机通信、数据处理和报表生成等功能。系统中大部分功能都以子VI的形式编写,主程序对子VI进行调用,这样设计的好处是可以将不同的功能交于不同的设计人员完成,同时也减小了程序的复杂程度以及出错的风险。本文设计的模糊PID控制器也将以子VI的形式设计。
实验时,加载控制曲线,通过数据采集卡发生控制信号,经调理后驱动液压缸或马达运动,同时数据采集卡采集从力传感器产生的反馈信号,对比反馈信号和设定值的差别,动态调整数据采集卡的控制信号,从而达到精确控制的目的。
根据实验过程可对模糊PID控制器程序进行如下设计。
1) 通过 Read Waveform from File.vi 读取编写好的控制波形文件,用来使液压缸或马达按照指定曲线运动。
2) 将传感器连接到NI 6601其中一个通道上,由LabVIEW中的数据采集VI采集力传感器数据,设定采样频率等。然后将采集到的数据与加载的控制曲线进行对比,取得E、EC的值。
3) 将前面生成的模糊规则文件fpid.fs由Load Fuzzy System.vi载入,并将取得的E、EC值连接到模糊控制器Fuzzy Controller.vi的输入端,选择模糊控制器模式为多输入多输出(MIMO)。Fuzzy Controller.vi将会在内部进行变量模糊化、推理、解模糊等一系列操作,然后将KP、KI、KD作为输出。
4) 最后将KP、KI、KD连接到用于PID控制的PID.vi上,PID.vi的输出连接到相应的控制端口既可以完成模糊PID控制。至此,模糊PID控制设计完成。程序框图如图3所示。
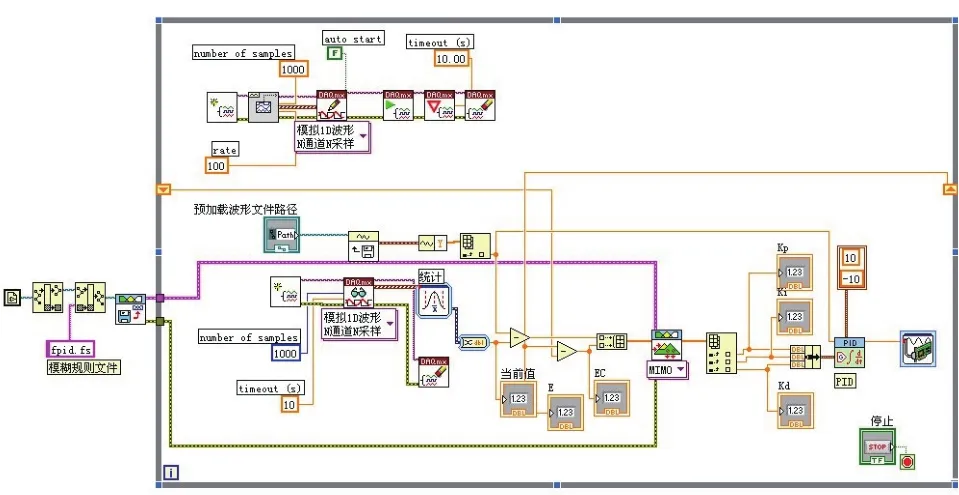
图3 LabVIEW 模糊PID控制器部分程序框图
4 模糊PID控制器验证
以系统中液压缸A为例,在前期的实验中,采用常规PID控制器,加载最大值为5KN的预设控制曲线时,控制效果如图4(a)所示,排除部分干扰情况,常规PID控制器的超调量在0.8KN,即14%左右,力控制曲线有较大波动。改为模糊PID控制器后,加载相似的最大值为7.6KN的预设控制曲线时,控制效果如图4(b)所示。采取模糊PID自整定控制器后,系统超调量为0.4KN,即5%左右。实验结果表明,采用模糊PID控制器后,控制精度有所提高,控制系统稳定性有所增强。
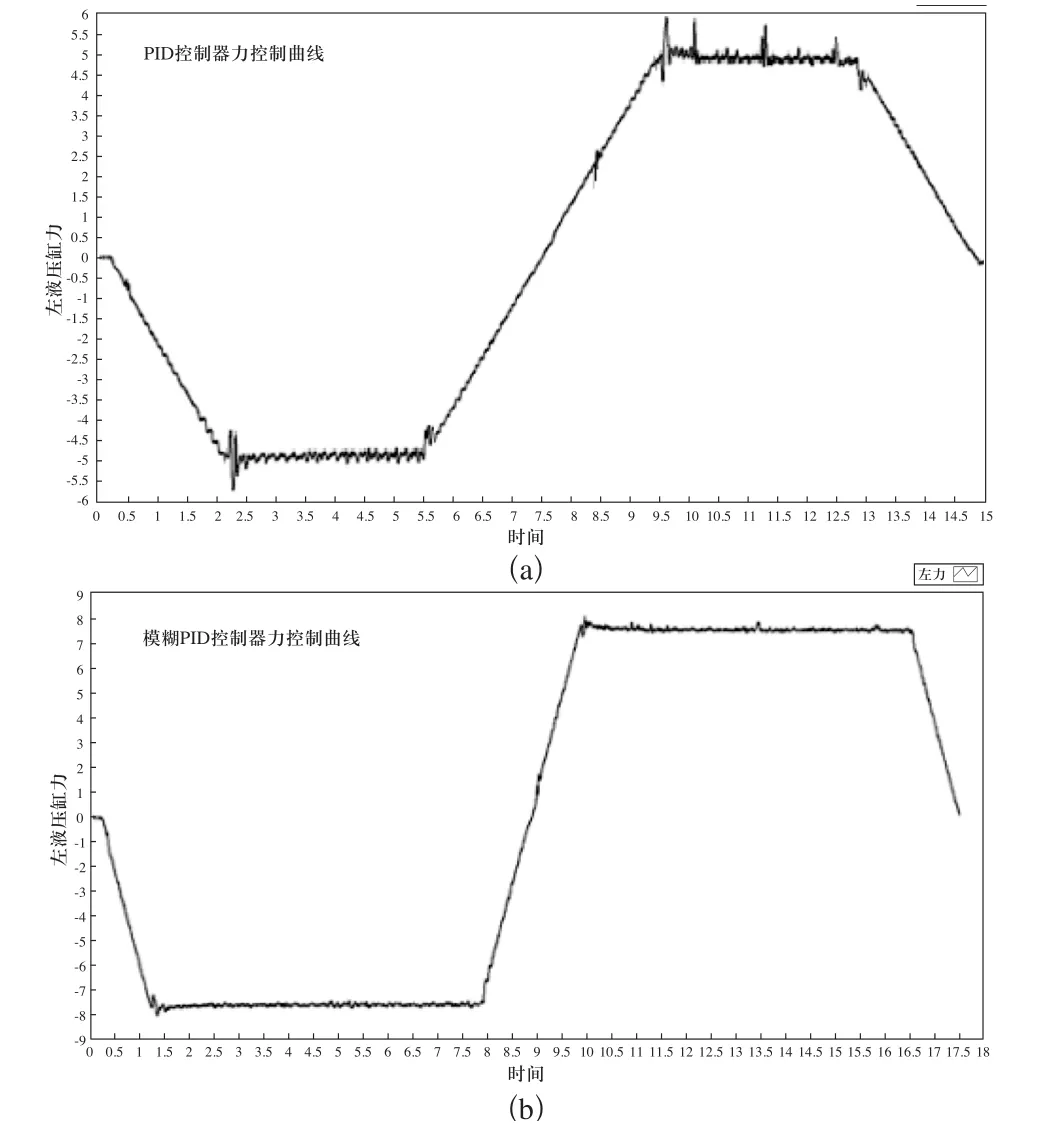
图4 常规PID控制器、模糊PID控制器力控制曲线
5 结论
本控制器的设计是在已有的EPS试验台测控系统的基础上进行。开发环境为NI LabVIEW平台,结合LabVIEW PID and Fuzzy Logic Toolkit模块能够方便的设计模糊PID控制器。将模糊PID控制器引入EPS试验台测控系统,能够使系统响应速度加快、控制精度提高、稳态性能变好,这是单纯PID控制难以实现的。开发过程中所使用的LabVIEW平台的良好软硬件结合功能、以及直观的开发环境使得模糊PID控制器的设计时间大大缩短。
[1]韩峻峰, 李玉惠, 等. 模糊控制技术[M]. 重庆: 重庆大学出版社, 2003.
[2]PATEL A V, MOHAN B M. Analytical structures and analysis of the simplest fuzzy PI controllers: analytical structures and stability analysis[J]. Information Science,2003.
[3]KOVACIC Z, BOGDAN S. 胡玉玲, 张立权, 刘艳军,等译.模糊控制器设计理论与应用[M]. 北京: 机械工业出版社, 2010.
[4]何春华, 蔡志岗. 基于LabVIEW的模糊PID控制系统[J].仪表技术. 2010, (07): 57-62.
[5]罗光明,黄晓宇,朱建林.基于MATLAB的模糊自整定PID参数控制器计算机仿真[J]. 机械与电子, 2001, (2):23-26.
