高空作业车载人作业平台臂架系统优化设计
2011-08-24冯家炳
冯家炳
(衡阳市机械技工学校,湖南 衡阳 421002)
125m高空作业车的结构
25m高空作业车的结构如图1所示。

图1 高空作业车结构
高空作业装置包括工作臂、回转平台、底盘、工作平台、液压系统和操纵装置等。25m高空作业车是利用自制底盘作为行走机构,具有自行式高空平台车的特点,适用于固定场所作业,具有微动行驶、扩大作业半径等特点,广泛用于造船和很多的园林工程。高空作业车按工作臂的形式,有四种基本形式,分别为:垂直升降式、折叠臂式、伸缩臂式和混合臂式。25m高空作业车为伸缩臂式的高空作业车,在行驶状态时,工作臂缩回套叠,工作时伸出,可以有效增大作业高度,同时具有工作效率高、操作简单、动作平稳等特点。
金属结构工作臂及其调平系统是高空作业车的重要组成部分。臂架通过销轴与转台部分连接,通过变幅油缸实现上下变幅。它承受高空作业车的载人平台的载荷以及作业时的各种外载荷。因此这部分是高空作业车安全可靠的一个重要部分,其重量通常占整机重量的三分之一以上,耗钢量大。因此,高空作业车臂架结构的合理设计,对减轻高空作业车自重,提高作业性能,节约钢材,提高高空车的可靠性都有重要意义。
2 伸缩臂的结构分析
(1)伸缩臂的结构。25m高空作业车伸缩臂采用三节伸缩式箱型臂结构,如图2所示。

图2 伸缩臂结构
各节臂之间可以相对滑动,靠它们搭接的上下滑块(滑块材料为MC1010)来传递作用力。基本臂根部与转台通过水平销轴连接,且其中部还与变幅油缸铰接,可实现工作臂在变幅平面内自由转动。工作臂伸缩采用7臂架伸缩油缸来实现二、三节工作臂同步伸缩。工作臂截面形状为四块板焊接而成。一节臂在各绞点处设加强板进行加强,一、二、三节臂臂头部均设置加强箍,保证系统结构的安全性。
(2)计算模型。为了方便分析计算,取回转中心与车架的中心轴线的绞点为坐标原点,并假设各臂轴线重合,对工作臂以直角坐标系建立计算模型,如图3所示。

图3 工作臂计算模型
(3)工况分析。由于高空作业车要求在所有幅度下,均可以在额定载荷下工作,因此其危险工况只有可能出现在两种工作情况下:一是在工作斗承载额定载荷,工作臂水平伸出至最大工作半径状态,如图4所示;二是在工作斗承载额定载荷,工作臂完全伸出,且处于相应最大幅度状态,如图5所示。

图4 危险工况1示意图

图5 危险工况2示意图
3 伸缩臂强度计算分析
分别对两种工况下的伸缩臂强度进行计算分析。
本高空作业车工作臂均由高强度HG70钢制造,HG70钢抗拉强度为700MPa,根据高空作业车技术条件(GB 9465.2-88),其许用应力值为:

式中:σs为材料屈服强度,σs=700MPa;S为结构安全系数,S=2;f1为应力集中系数,f1=1.1;f2为动载荷系数,f2=1.25。
(1)危险工况1的计算。分别进行三节臂应力计算。先对一节臂进行分析,一节臂受力如图6所示,其危险截面为A-A截面。

图6 危险工况1工作臂受力示意图


同样可对此工况1下的二节臂、三节臂危险截面进行计算,求得其最大应力。
(2)危险工况2的计算。同样对三节臂分别计算。先对一节臂进行分析,一节臂受力如图7所示,其危险截面为A-A截面。
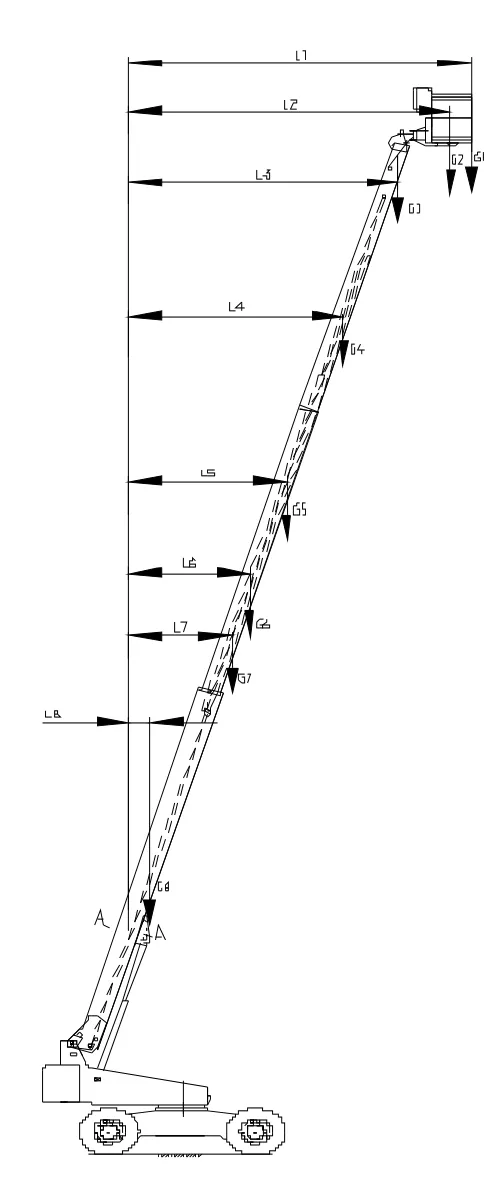
图7 危险工况2一节臂受力示意图
根据图示受力分析,可计算出一节臂危险截面应力。同样方法,可分别计算工况2下,二节臂、三节臂的应力。
根据计算,工况2状态下各工作臂应力小于工况1,因此工况1为伸缩臂最危险工作状态。
4 结语
通过对25m高空作业车的臂架结构为研究对象进行分析,传统的作业车均由优质合金结构钢Q460来制造,本作业车采用HG70高强度钢来制造。根据分析结果设计的结构明显优于以往,臂架钢板厚度至少可以减小2mm,减轻了臂架总重量的1/5。通过对薄弱点增加加强板来满足强度要求,同时适当减小钢板厚度,解决了结构笨重的缺陷,降低了成本,同时为运用有限元分析优化提供了基础。
