基于TCN 的模拟机车电力牵引及其控制系统的设计
2011-08-16杨丰萍姜悦礼
杨丰萍,姜悦礼
(1.华东交通大学电气与电子工程学院,江西南昌330013;2.中国北车股份有限公司大连电力牵引研发中心,辽宁大连116022)
随着电力电子技术的发展,机车的电力牵引及其控制也获得了更进一步的发展,电力牵引传动方式由交直传动成功地转换到交直交传动,而且由于数字化和通讯技术的发展,网络化控制技术在机车上应用成为新的发展方向。机车电力牵引及其控制系统是一个非常复杂的系统,具有较强的专业特点,没有通用的学习和研究平台。为了方便广大研究者在实验室条件下进行研究,本文开发了一种新型的基于TCN(train communication network)的电力机车模拟电力牵引及其控制系统,该系统全面模拟了交直传动和交直交传动电力机车牵引系统的组成,采用TCN网络控制技术。
1 系统组成和基本原理
本实验系统提供了交直传动和交直交传动两种与机车的电力牵引传动系统完全相似的传动系统,它们的负载分别是轴连接在一起的直流电机和交流电机。交直传动部分采用了传统的交直传动电力机车三段桥相控直流传动的结构。交直交传动部分采用了现代交流传动电力机车主传动系统的典型的单相四象限变流器+牵引逆变器的结构。
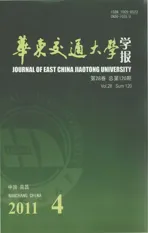
本实验系统主要设备包括:配电柜、交直传动控制台、交直交传动控制台、交直传动柜、交直交传动柜和电动机组,如图1所示。
配电柜为整个系统提供主电源、控制电源和驱动辅助风机电源,交直传动柜和直流电机共同完成直流传动的模拟控制实验,交直交传动柜和交流电机共同完成交流传动的模拟控制实验,交直传动控制台完成对交直传动柜的控制,交直交传动控制台完成对交直交传动柜的控制。
本实验系统的控制原理有3种方式:
1)通过设置在交直传动柜和交直交传动柜面板上的控制开关实施单独的交直传动控制和交直交传动控制。由设在交直传动柜和交直交传动柜面板上控制方式选择开关进行控制方式选择,此时网络不投入工作。
2)通过设置在交直传动控制台或交直交传动控制台上的控制开关来实施控制单独的交直传动控制和交直交传动控制。此时的控制是在MVB网络通讯的传输下进行的,可以分为单独的交直传动控制、单独的交直交传动控制,可以模拟单独的牵引系统网络实验。
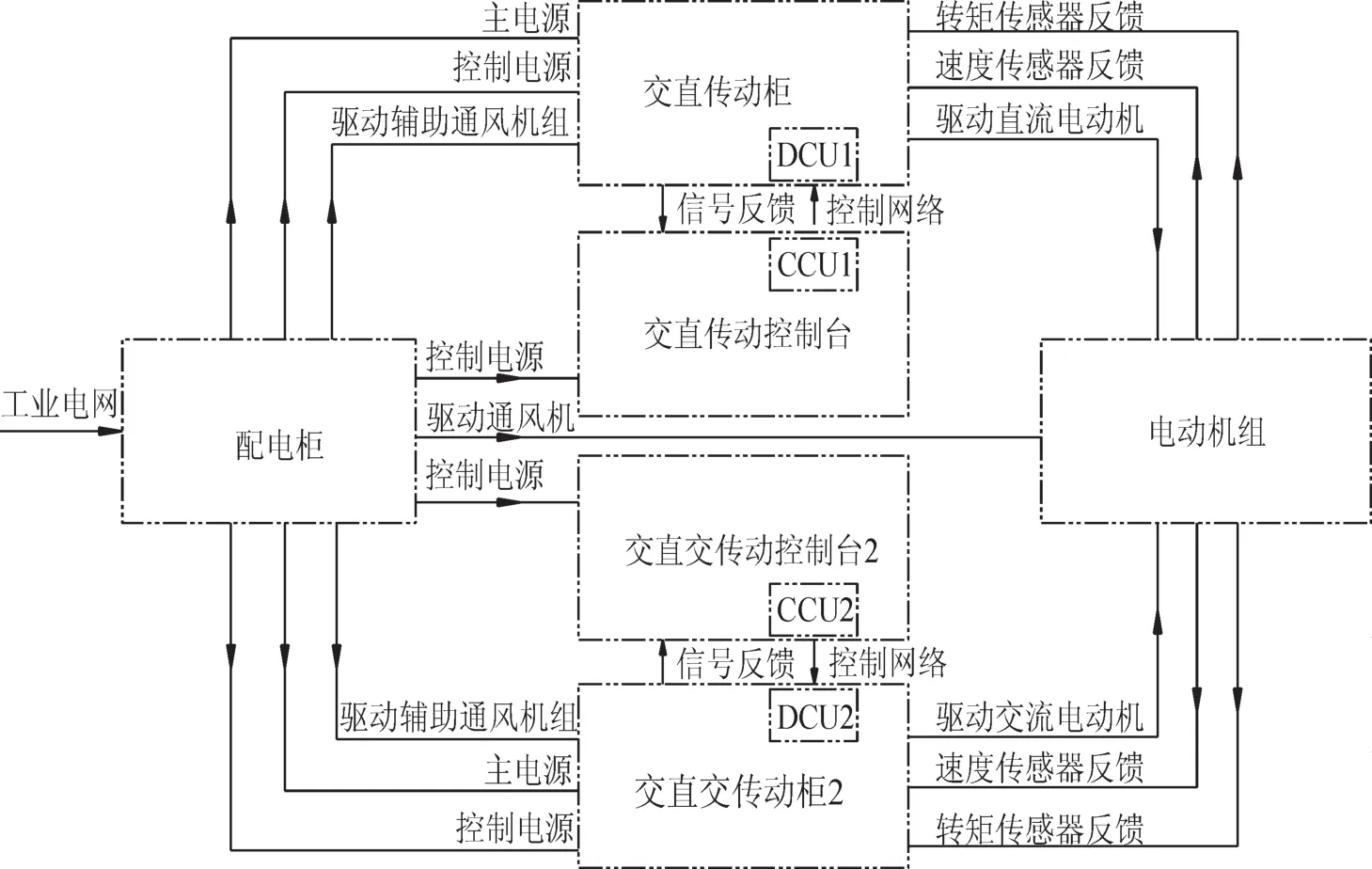
图1 系统结构示意图Fig.1 General view of system structure
3)通过设置在交直传动控制台或交直交传动控制台上的控制开关来实施控制交直传动控制和交直交传动控制的同步控制。此时的控制是在WTB网络通讯的传输下进行的,可以分为以交直传动控制为主,以交直交传动控制为副的重联控制;或以交直交传动控制为主,以交直传动控制为副的重联控制,可以模拟两机重联的牵引系统网络实验[1]。
2 交直传动及其控制系统的设计
2.1 配电系统
电源系统接受市电电源输入,并送给模拟牵引变压器,由该变压器向主系统等提供电能,包括:总断路器、直流传动牵引变压器、输出各支路的保护开关等。
模拟牵引变压器参数
输入:单相AC220 V,25 kW
输出
绕组1:AC124 V(10 kW)
绕组2:AC62 V(5 kW)
绕组3:AC62 V(5 kW)
绕组4:AC28 V(5 kW)
2.2 交直传动系统
交直传动柜内包括:三段经济桥路,励磁桥路,主回路接触器组,制动电阻、磁削电阻等电阻单元,交直传动控制单元等。交直传动系统主电路见图2。
交直传动系统运行在牵引工况时,其对直流电机的供电支路转换为串励方式,牵引三段整流桥接受牵引变压器的三路交流输入,经整流输出三段叠加的电压连续可调的直流电压,供直流牵引电机牵引运行,通过转换电枢绕组的接入方向,可实现电机的正反转控制,通过闭合磁场消弱接触器,可以实现高速段在电枢电压不再提高条件下的弱磁运行。
交直传动系统运行在制动工况时,其对直流电机的供电支路转换为他励方式,经相应的电路转换,他励绕组由专门的励磁整流桥供电,通过调节即可实现励磁电流的调节;同时,制动工况时,电枢回路接入制动电阻,将电机发出的电能消耗到制动电阻上。在低速段,电枢自身发电电压不足以维持较大的制动电流时,通过电路转接,使主整流桥为电枢回路加压,可实现加馈制动[2]。
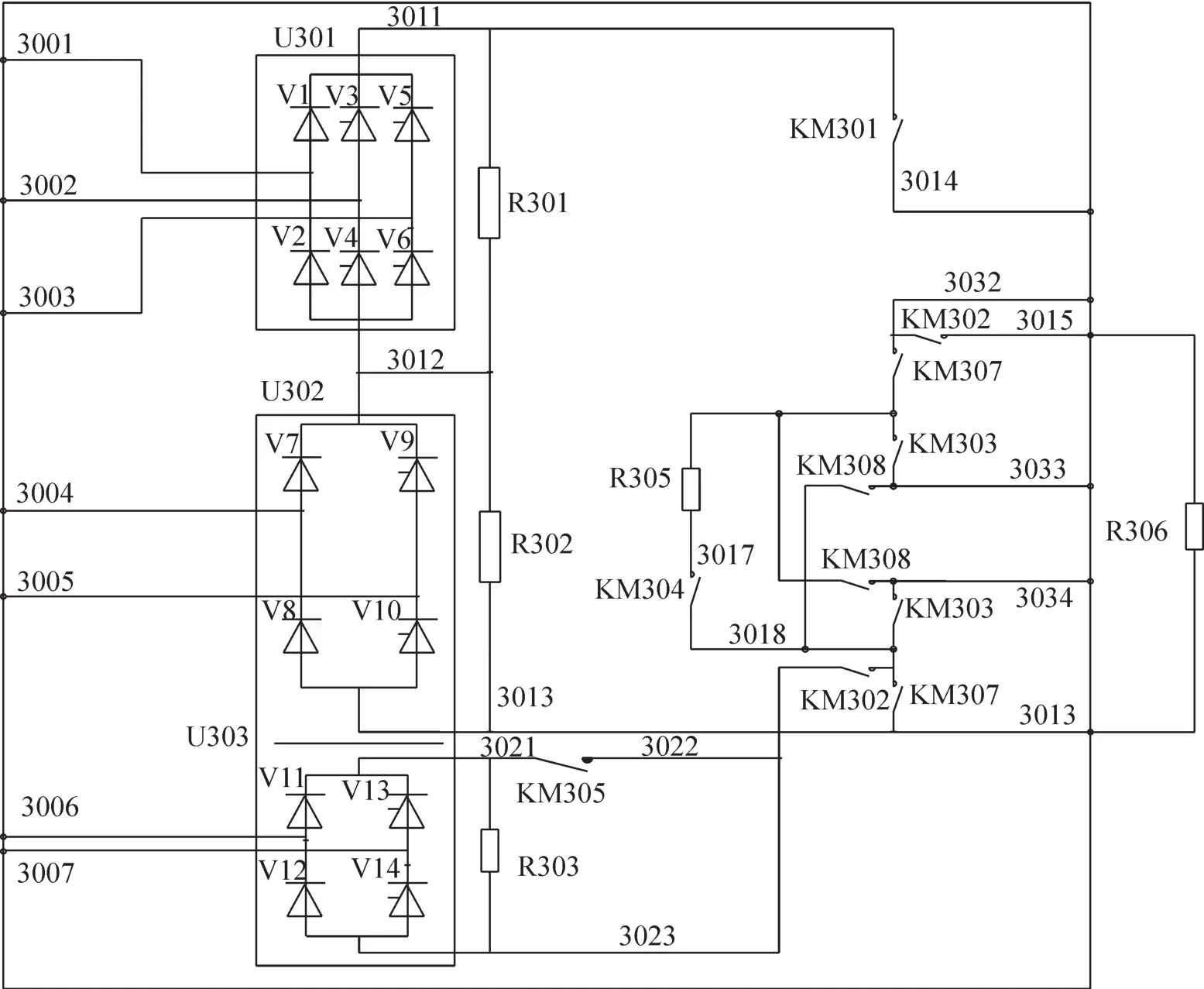
图2 交直传动系统主电路Fig.2 Main circuit ofAC-DC drive system
图2中:R301,R202,R303为空载电阻;R305为磁削电阻;KM301为电机电枢接触器;KM302,KM303,KM304,KM308为位置转换开关;KM305为励磁输出接触器;KM306,KM307为转向转换开关。
交直传动系统参数:
经济三段桥输入:2×单相AC62 V(10 kW)+单相AC124 V(10 kW)
他励桥输入:单相AC28 V(5 kW)
牵引工况电压输出:0-220VDC
制动工况励磁输出:0-25.2VDC
制动工况加馈电压:0-110VDC
调节方式:恒流+准恒速控制
2.3 传动控制策略
交直传动柜只有一个交直变流器,有一个独立的控制单元。
图3 交直传动控制框图Fig.3 Block diagram ofAC-DC drive control system
传动控制单元对电机控制方法采用速度与电流的双闭环控制,电压的限制环节作为辅助控制,如图3所示。由控制手柄给出的指定速度(即级位通过网络传给直流传动控制单元)与检测出的电机实际速度比较,得出当前控制所需的电机电流Id(牵引)或Iz(制动)值。该值送入电流控制部分作为控制指定值,与电机的实际Id或Iz值相比较,得出整流桥输出电压Ud控制值。由脉冲的形成与放大环节负责执行,进而控制整个系统的工作状态。电压限制环节仅在电机端压达到限制值时,采取措施抑制Ud控制值的继续增大,平时不起作用。电机在传动控制单元控制下,通过速度、电流两个闭环来调节控制电机速度,进而达到司机手柄所给定的速度或牵引力要求[3]。
3 交直交传动及其控制系统的设计
3.1 配电系统
电源系统接受市电电源输入,并送给模拟牵引变压器,由该变压器向模拟主传动系统等提供电能,包括:总断路器、交流传动牵引变压器、输出各支路的供电保护开关等。
模拟牵引变压器参数:
输入:单相AC220 V,25 kW
输出:AC380 V(20 kW)
结构形式:环氧浇注干式
冷却方式:自然冷却
3.2 交直交传动系统
交直交传动柜内包括:两点式四象限脉冲整流器,中间直流环节,两点式逆变器,交直交传动控制单元等。交直交传动系统主电路见图4。
交直交传动系统牵引运行时,牵引变流器接受牵引变压器的一路单相交流输入,经四象限脉冲整流器整流,再逆变为电压、频率可调的三相交流输出,供交流牵引电机牵引运行,通过改变三相输出相序,实现电机的正反转运行。
交直交传动系统电制动运行时,交流牵引电机处于发电工况,牵引变流器的电机侧逆变器接受牵引电机的三相交流输入,整流成直流电,再经四象限脉冲整流器逆变为电压、频率稳定的单相交流电馈回牵引变压器[4-5]。
交直交传动系统参数:
输入:单相AC380 V,50 Hz,25 kW
输出:VVVF控制
电压输出范围:3相0~380 V
频率调节范围:0~100 Hz
调节方式:四象限整流器采用瞬态电流控制,逆变器采用转差频率控制
3.3 传动控制策略
交流传动柜由单相四象限整流器和牵引逆变器组成,它们共用一个控制单元。
3.3.1 四象限整流器控制策略
单相四象限整流器输入回路等效电路如图5所示。
如忽略电阻压降,交流回路的电压平衡方程式为
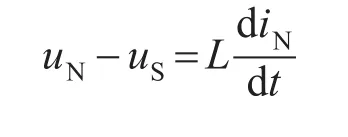
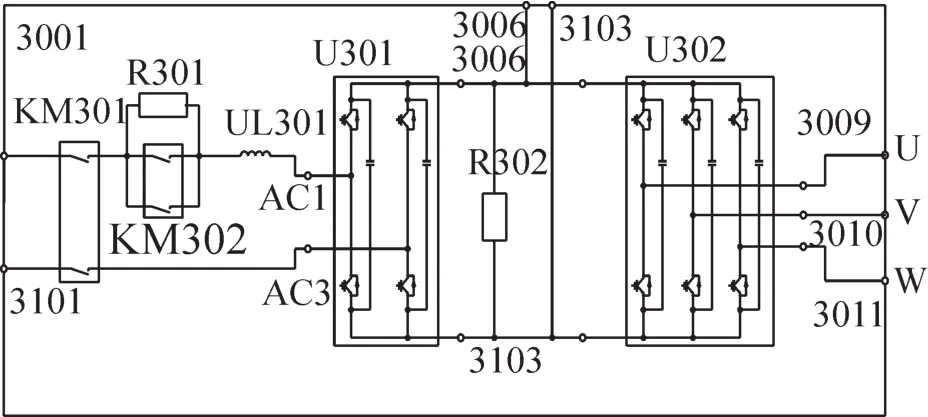
图4 交直交传动系统主电路Fig.4 Main circuit ofAC-DC-AC drive system

图5 单相四象限变流器的等效电路图Fig.5 Equivalent circuit of single-phase four quadrant converter
式中:uS为四象限的输入电压,uN为牵引变压器输出次边电压。
由于整流器是通过基波来传送功率的,故只研究基波成分,设

式中:ψ为uS滞后uN的夹角,θ为电流iN滞后uN的夹角。
由此可得交流回路的基波电压平衡方程式为

用矢量表示为
令
矢量分析可知,UL的长度与电网电流成正比,代表电网提供负载能量的大小,调节US的幅角ψ可以改变IN和流向负载的直流电流Id的大小,使电网和负载之间的能量供求平衡,达到稳定Ud的目的。同时,要保证IN和UN同相,US的幅值(调制深度K)也必须相应调节。
因此,四象限整流器的控制对象即为电压矢量US,通过对US的幅值和相角的控制即可稳定中间电压Ud和保证电网侧功率因数为 1[3]。
3.3.2 牵引逆变器控制策略
在牵引传动控制系统中,转差频率控制是一种应用广泛的控制算法。

图6 异步牵引电机转差频率控制算法Fig.6 Slip frequency control algorithm for Asynchronous traction motor
对于本实验平台,当逆变器处于牵引控制时(此时交直变流器处于制动控制),采用图6所示的异步牵引电机转差频率控制算法,这是速度闭环型的转差频率控制,速度给定值n*来自司机控制台手柄,根据司机控制台速度手柄的给定值进行调速,速度控制由速度PI调节器实现,给出所需的转差频率而当逆变器处于制动时(此时交直传动柜处于牵引控制),同样,采用转差频率控制,转矩给定值T*来自司机控制台手柄,按照司控台力矩手柄的给定值调节负载转矩,给定信号直接转换成相应的转差频率
在测量电机转速后,可以分别得到的电动机定子频率如下

显然交流电机在逆变器处于牵引控制和逆变控制时分别做电动机与发电机运行。按照事先确定的V/f曲线,由定子频率可计算出相应的电机相电压。然后可以采用PI调节器来补偿电压。
4 系统网络控制的设计
4.1 网络控制拓扑
本系统采用先进的TCN网络控制系统设计开发,TCN网络控制系统符合国际标准IEC61375,是目前国际上流行的列车网络控制标准。该总线由绞线式列车总线WTB和多功能车辆总线MVB两级总线组成[6]。
在交直传动控制台设有中央控制单元CCU1、远程信息采集单元RIOM1和信息显示单元IDU1,在交直交传动控制台设有中央控制单元CCU2、远程信息采集单元RIOM2和信息显示单元IDU2,在交直传动柜内设有直流传动控制单元DCU1,在交直交传动柜内设有交流传动控制单元DCU2。
在交直传动系统中,控制单元CCU1、RIOM1、信息显示单元IDU1、控制单元DCU1之间通过独立的MVB总线连接起来,可以实施模拟交直传动机车的独立运行。
在交直交传动系统中,控制单元CCU2、RIOM2、信息显示单元IDU2、控制单元DCU2之间通过独立的MVB总线连接起来,可以实施模拟交直交传动机车的独立运行。
这两个系统也可以通过WTB网络线连接起来,两台机车的控制可以由任意一个控制台实施控制,可以进行机车重联的模拟。网络系统拓扑图见图7。

图7 网络系统拓扑图Fig.7 Topology of network systerm
4.2 网络控制基本单元
系统中的控制单元CCU1、RIOM1和CCU2、RIOM2具有相似的结构。其中:RIOM1和RIOM2是控制与通信系统的组成部分,上电以后,该单元通过一个自测过程,完成自测过程以后,模块进入正常操作模式。当设备处于正常操作模式时,不干扰其正常功能的循环测试。CCU1和CCU2是特性控制和逻辑控制的核心[7]。
4.3 交直传动控制
控制系统相关控制部件分别布置在交直传动控制台、交直传动控制柜中。
交直传动控制台是系统的人机交互设备,在控制台上布置有控制器、控制单元及显示单元、控制开关组、显示仪表及指示灯等。
交直传动控制柜上的交直传动主控单元,与布置在控制台上的中央控制单元、显示单元通过MVB控制网络连成一体,接受来自控制开关组和控制器的各种指令,组织系统的运行。
4.4 交直交传动控制
控制系统的相关控制部件分别布置在交直交传动控制台、交直交传动控制柜中。
交直交传动控制台是系统的人机交互设备,在控制台上布置有控制器、控制单元及显示单元、控制开关组、显示仪表及指示灯等。
交直交传动控制柜上的交直交传动控制单元,与布置在控制台上的中央控制单元、显示单元通过MVB控制网络连成一体,接受来自控制开关组和控制器的各种指令,组织系统的运行[8]。
5 结语
基于TCN网络的电力机车电力牵引及其控制系统,由中国北车股份有限公司大连电力牵引研发中心已经研制完成,在北京交通大学、西南交通大学、华东交通大学等电力牵引及传动控制系统专门教学研究机构投入使用,对于本科生或研究生等相关专业的教学活动和理论研究更有很大的帮助。通过对四象限整流器和逆变器单元应用程序的编写,可以在地面上进行机车电传动系统的试验,对中央控制单元和网关单元应用程序的编写,可以实现对机车网络控制系统的试验。该实验系统的广泛应用,必将为中国铁路机车车辆发展起到积极的推动作用。
[1]黄济荣.电力牵引交流传动与控制[M].北京:机械工业出版社,1998.
[2]赵叔东.韶山8型电力机车[M].北京:中国铁道出版社,1998.
[3]王书林.电力牵引控制系统[M].北京:中国电力出版社,2006.
[4]张曙光.HXD3型电力机车[M].北京:中国铁道出版社,2009.
[5]崔殿国.SSJ3型交流传动电力机车[M].北京:中国铁道出版社,2008.
[6]倪文波.王雪梅.高速列车网络与控制技术[M].成都:西南交通大学出版社,2005.
[7]宋雷鸣.动车组传动与控制[M].北京:中国铁道出版社,2009.
[8]姜悦礼.上海低速磁浮列车试验线电气系统[J].电力机车与城轨车辆,2007,129(3):48-50.