面向视神经假体的目标感知与编码DSP系统*
2011-08-08陈仁刚赵洪星
孙 强,陈仁刚,赵洪星,高 勇
(西安理工大学 电子工程系,陕西 西安710048)
视觉是人们认识世界的主要途径之一,通常从外界获取的信息90%是由视觉完成的。但是由于一些原因而导致的视力严重残疾,给患者的学习、生活和工作带来很大的不便和痛苦。对于视网膜等器官受到损伤或者发生病变的患者,目前临床上还没有有效的治疗方案。随着电子、生物技术的发展,人们试图寻求通过人工视觉假体对盲人进行一定的视觉修复。在视网膜假体的研究领域,美国、德国的一些研究小组把视网膜假体植入到盲人的视觉神经系统中代替受损组织,使患者产生光幻视,在视觉假体的研究中迈出了重要的一步。日本大阪Yasuo Tano领导的研究小组新近开发了一种在脉络膜上层经视网膜刺激的人工视觉方案,并在动物实验中证明了这种新方法可引发局部视网膜神经节细胞的兴奋[1]。由于视神经假体的植入手术风险较小,同时在大多数眼科疾病中,视神经的功能都没有受到损伤,并且通过刺激视神经可能刺激整个视觉区域,所以视神经可以作为视觉修复的刺激点。在我国,人工视觉假体技术起步较晚,虽然取得了一些基础性研究成果,但目前的研究工作对于实际应用还有一定的差距。
1 视觉假体简介
视觉假体是一种通过刺激视觉神经系统使失明患者重新获得视觉的人工器官,该人工装置采集外界图像信息,由微型芯片进行处理、编码成电信号,通过微电流刺激器将刺激微电流信号加载到微电极阵列,对视觉神经系统进行作用进而传递到盲人的大脑视皮层,从而实现视觉信息的感知。
在理论上,视觉假体的实现可通过对视觉通路上任意位置进行神经电刺激,以期产生视光感。按照植入位置的不同,视觉假体基本上可以分为视皮层假体、视神经假体和视网膜假体。视神经假体避免了对大脑造成的侵入性破坏,而且是一种更简便更容易操作的技术。与视皮层假体相比,视神经假体植入的手术风险较小,引起的并发症较轻;但是目前视觉信息感知和编码与视神经刺激的对应关系还不是很明确,视觉空间分辨率也有待提高[2]。
2 面向视神经假体的目标感知机理
图1为视觉假体的目标感知示意图。首先微型摄像机拍摄图像,将图像传输到图像处理器中,处理器利用预先设定的图像处理方法,从拍摄到的图像中提取重要的视觉信息,“神经编码器”将处理后的视觉信息编码成特定时间和空间模式的电刺激脉冲序列;最后,这些电刺激脉冲由神经刺激器直接作用于视神经,进而在人的大脑中重现图像信息[1]。

随着研究的深入,人们逐渐认识到视觉假体最大的障碍在于如何建立假体与大脑之间的有效信息传递。吴开杰等人通过动物视觉电生理实验验证了以视神经为神经接口的假体设计的可行性[1]。基于上述思路,本文着重于视觉假体前端的目标感知与编码系统的设计。
3 目标感知与光幻视编码系统的设计与实现
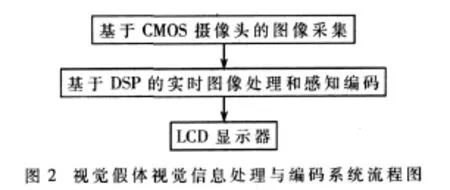
视觉假体视觉信息处理与编码系统可分为CMOS摄像头图像采集、基于DSP平台的实时图像处理以及LCD显示三个功能模块,其流程图如图2所示。其中,图像处理主要包括两个重要处理过程:感兴趣目标的提取和基于目标简化信息的视神经生理学模式 (光幻视)编码,后者直接对应着微电极的刺激模式。
3.1 CMOS摄像头的数据采集
选用低分辨率的CMOS摄像头用于视觉假体的图像采集。此外还需要通过视频解码器将CMOS摄像头上的信号转换为要求的图像数据供DSP读取。选用TI公司的超低功耗TVP5150视频解码器。
3.2 基于实时图像处理算法的目标提取
首先从摄像机捕捉的图像中提取并尽可能简化出对盲人最有用的目标信息,然后神经编码器将图像信息转换成电刺激信号。鉴于此,通过实时图像处理算法从实际捕捉的场景中提取出目标主体,是实现视觉假体临床医用的首要环节。
3.2.1 图像的预处理
所采用的图像处理算法只需要灰度图像就可以很好地提取出感兴趣目标的轮廓。因此,首先需要对摄像头获取的彩色图像进行灰度图像转化预处理,转化成灰度级数据。
3.2.2 感兴趣目标的提取
根据实际应用的需要,在确定了感兴趣目标所在的区域后,就可以通过经典的图像处理方法对这些感兴趣目标进行提取。本文采用了图像分割方式对图像进行处理,然后有针对性地选取感兴趣的特定目标。
3.3 基于目标轮廓的神经生理学光幻视编码
3.3.1 光幻视模式
Veraart等人[3]用微电极刺激某一志愿者的视神经,在其视觉皮层上呈现的真实光幻视模式如图3所示。图中的横轴是眼睛的水平面,纵轴为视野的对称轴。人类视觉信息的主要采集区域在左右视角30°,上方视角30°,下方视角 40°的范围内。
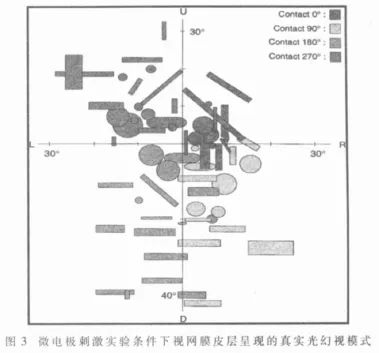
这些光幻视模式分别对应着不同的微电极刺激方式。将利用这些基本的光幻视模式去表达感兴趣目标的轮廓。这样,每一种特定的目标轮廓就由不同的光幻视模式组成,也就对应着某一特定的微电极刺激模式组合。因此,对该试验对象来说,通过特定的微电极刺激组合达到感知目标的目的。
3.3.2 基于光幻视模式的目标编码
采用模式匹配的方法来完成这个环节的任务。在匹配的过程中,根据Veraart的研究成果[3]建立匹配模式的数据库,并设置模式匹配时覆盖度为80%:当模式与目标的匹配度高于80%时便接受,低于该标准时便舍去。依据上述方法,可以对提取的目标实现良好的编码。
3.4 基于DSP开发平台的系统实现
选用TI公司推出的DSP 6000系列中TMS320DM642专用视频信号处理芯片作为人工视觉图像处理系统的主芯片,用视频解码器TVP 5150将CMOS摄像头采集的信号,转换为图像数据传送给DSP DM642,DSP将采集的图像缓存在SDRAM中,进行处理和编码,如图4所示。

4 示例结果
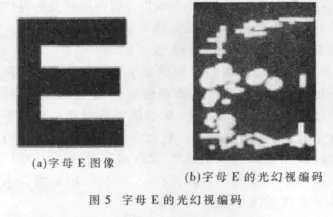
对英语字母作出了编码的实验,验证了编码方案的可行性。图5所示为字母E(图5(a))的编码结果。从图5(b)可以看出,字母E的轮廓分别由不同的光幻视模式组合而成,整体上很好地表达了字母E所能传递的视觉信息。
本文首先介绍了视神经视觉假体的工作原理,对视觉假体前端的目标感知及编码部分分别给出了解决方案,目标编码的可行性得到了验证。本文详述了基于DSP硬件平台的设计过程,展示了快速实现目标感知和光幻视编码的实验结果。本系统经过在DSP平台上的调试,取得了初步的成果,能够为后端神经刺激器刺激方式的确定提供决策性的方案。
[1]吴开杰,柴新禹,李丽明,等.基于视神经的视觉假体研究与设计[J].中国科学,2005,37(增刊):146-152.
[2]石萍,邱意弘,朱贻盛,等.人工视觉假体研究综述(II)——视皮层、视神经束、感觉替代假体的研究现状[J].生物医学工程学,2008,25(4):945-949.
[3]VERAART C,RAFTOPOULOS C,MORTIMER J T,et al.Visual sensations produced by optic nerve stimulation using an mplanted self-sizing spiral cuff electrode[J].Brain Res.,1998(813):181-186.
