基于模糊逻辑的HEV再生制动能量回收的研究
2011-08-01张丹红周加洋苏义鑫
张丹红,周加洋,苏义鑫
(武汉理工大学自动化学院,湖北 武汉 430070)
汽车行驶过程中速度变化较大,经常需要减速制动,可回收利用的制动能量是非常多的。传统汽车在制动过程中,汽车的动能或势能通过制动器的摩擦转化为热能而耗散掉,浪费了大量的制动能量。而混合动力电动车是燃油(气)发动机动力与电动机动力两种动力的组合,当电子制动系统得到制动信号时,电机处于发电机状态,这样可以使相当一部分的动能转化为电能[1],这一过程称为混合动力电动汽车的再生制动。
在以往的制动能量回收的研究中,比较常见的再生制动能量回收策略有前、后轮理想制动力分配策略,前、后轮制动力比例分配策略,最优能量回收策略[2-4]。这些控制策略能实现一定的能量回收,但没能充分发挥电机的再生制动特性。
在保证制动安全性和舒适性的前提下,采用模糊逻辑的策略,在车辆制动过程中,使再生制动力矩和摩擦制动力矩合理分配,始终保持最佳的比例,同时尽可能多地发挥电机的再生制动特性,以便将更多的动能转化为电能储存在电池装置中,这样既可以节约能源,提高混合动力电动汽车的行驶里程;同时还可以耗费较少的燃油,减少有害气体的排放,有良好的环保作用。
1 制动力矩分配及影响制动的因素
1.1 制动力矩分配
并不是所有的制动能量都可回收。在混合动力电动汽车上,只有驱动轴上的制动能量可沿着与之相连接的驱动系统传送至储能装置。当车的驱动轮在前轮,车辆制动时,为保证制动的安全性和舒适性,摩擦制动力矩必须起作用,即前轮要有再生制动力矩和摩擦制动力矩,而后轮仅有摩擦制动力矩。车轮上制动力矩的分配如图1所示。
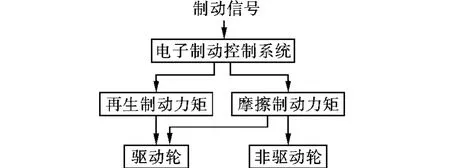
图1 车轮上制动力矩的分配
在制动过程中,当电池储能装置完全被充满电时,再生制动系统就不再起作用,只有摩擦制动起作用以保证制动过程的顺利进行。此外在制动过程中,必须保证驾驶员具有舒适性和安全性,与传统汽车制动时的感觉一样,摩擦制动力矩的参与是必不可少的。因此,制动力矩的合理分配是很关键的。采取模糊逻辑的策略,使电子制动控制系统合理地分配再生制动力矩和摩擦制动力矩,使两者始终保持最佳的比例。
1.2 影响再生制动能量回收的关键因素
(1)行驶工况。不同行驶工况,HEV(hybrid-electrie vehicle)制动出现的频率不同。
(2)制动安全性要求。当电机提供的再生制动力矩不能满足车辆制动力矩的要求时,应通过制动控制器立即让机械摩擦制动参与制动。
(3)驱动型式。制动时,并不是所有车轮上的制动能量都可回收,只有驱动轮上的部分制动能量能被回收[5]。
(4)电机类型。再生制动对电机的扭矩特性要求与驱动时对电机的动力特性要求相同。
(5)电池的SOC。SOC是描述电池剩余电量占额定电量的百分比,是描述电池充电状态的一个重要参数。当储能器被充满电或者充电电流过大时,无法回收制动能量。
2 模糊控制器的设计
2.1 模糊语言变量的选取
采用Sugeno模糊推理模型,即T-S型模糊推理系统,输出变量为常系数,可以直接推动执行机构。
模糊输出变量为k,表示实际再生制动力矩占制动请求总力矩的比例。
根据上述影响再生制动能量回收的几个因素,选取电池SOC作为模糊输入变量之一。如果SOC值过大,再生制动部分起的作用就会较小;而SOC值过小,再生制动部分起的作用就会较大,因此SOC是影响再生制动能量回收的关键因素[6]。
此外,电机作为制动过程中的关键部件,在制动过程中处于发电状态时,其能提供的最大制动力矩是定值,即一定类型、一定功率的电机能提供的最大制动力矩是定值。因此选取模糊输入变量为T=Treq-Tmax,Treq为制动请求的总力矩(Treq的大小随着不同的制动情况而变化),Tmax为电机能提供的最大制动力矩(Tmax为常量),该变量涉及到电机的再生制动力矩,能更好地利用电机的再生制动特性。
因此,选取的模糊输入变量为:电池SOC、T。根据这两个模糊输入变量和输出变量制定模糊规则,使车辆制动时能最大限度地发挥电机能量回收的特性。
在已有的研究中,选取制动时的车速、减速度以及制动强度的大小作为模糊输入变量,能实现一定的能量回收[7-10],但没有考虑到影响再生制动能量回收的关键因素,即电机的再生制动力矩,不能充分发挥电机的再生制动特性。笔者选取的模糊输入变量,考虑了电机能提供的最大再生制动力矩,抓住了影响再生制动能量回收的关键要素。
2.2 输入变量的隶属度函数选取
输入变量T的隶属度函数如图2所示。
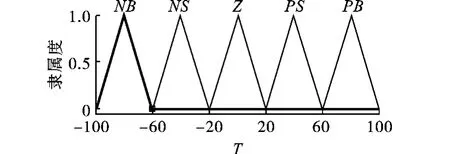
图2 T的隶属度函数
图2中,T的模糊论域为[-100,100],模糊集为{NB(负大),NS(负小),Z(零),PS(正小),PB(正大)}。
输入变量SOC的隶属度函数如图3所示。

图3 SOC的隶属度函数
图3中,SOC的模糊论域为[0,1],模糊集为{L(小),M(中),B(大)}。
输出变量常系数k的值为{0.20,0.30,0.40,0.45,0.50,0.60,0.70,0.80},这些值是根据系统的大量输入输出测试数据以及实践积累的数据,通过辨识方法得到的。
2.3 模糊逻辑控制规则
采取 if x1is A1and x2is A2,then u=k的形式。模糊规则表如表1所示。
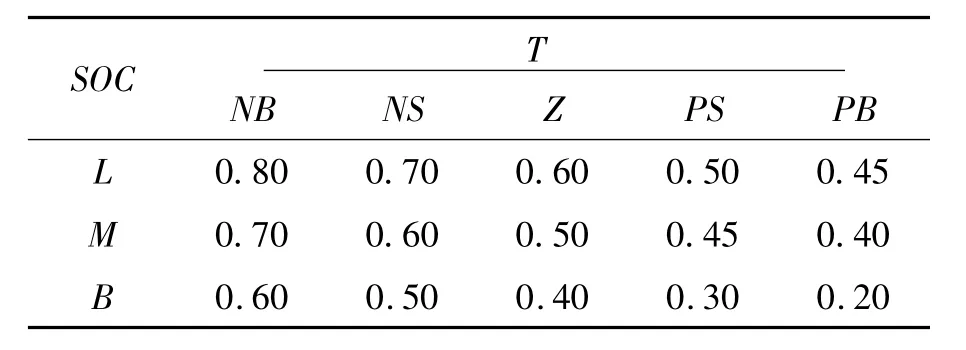
表1 模糊规则表
3 模糊逻辑策略模型的建立
在Matlab/Simulink环境下搭建的模糊逻辑策略模型,如图4所示。
其中:Treq为制动所需的总力矩;Tmax为电机能提供的最大制动力矩;T=Treq-Tmax;SOC为电池剩余电量占额定容量的比值;T、SOC为模糊控制器的输入变量;k为模糊控制器的输出变量;Treg-brake为制动过程中实际分配的再生制动力矩;Tfri-brake为分配的摩擦制动力矩。

图4 模糊逻辑策略模型
4 控制策略的仿真和分析比较
在ADVISOR仿真环境中有已经搭建好的混合动力电动汽车的部件模型,以及部件的参数设置。将图4的模糊逻辑策略模型嵌入到ADVISOR软件仿真环境中。
主要仿真参数为:选择的混合动力电动汽车为并联型,车质量为656 kg,发动机的最大功率为41 kW,电机类型为永磁同步电机,额定功率为58 kW,能提供的最大力矩为400 N·m,储能装置为铅酸蓄电池,额定容量为25 Ah。
仿真设定电池SOC的初始值为0.500,初始车速为50 km/h,制动减速至0,仿真观察电池SOC的变化曲线,选择CYC_UDDS工况来进行仿真分析。CYC_UDDS工况在估算车的性能时被广泛采用,在研究车辆的制动性能以及HEV的再生制动能量回收时也被广泛使用。因此,选用CYC_UDDS工况。
图5为ADVISOR中原有的再生制动能量回收策略(比例制动策略,由车速来分配再生制动力矩和摩擦制动力矩)的SOC变化曲线,图6为模糊逻辑策略的再生制动能量回收的SOC变化曲线。
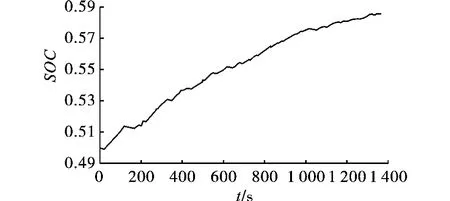
图5 ADVISOR中原有的再生制动能量回收策略的SOC变化曲线
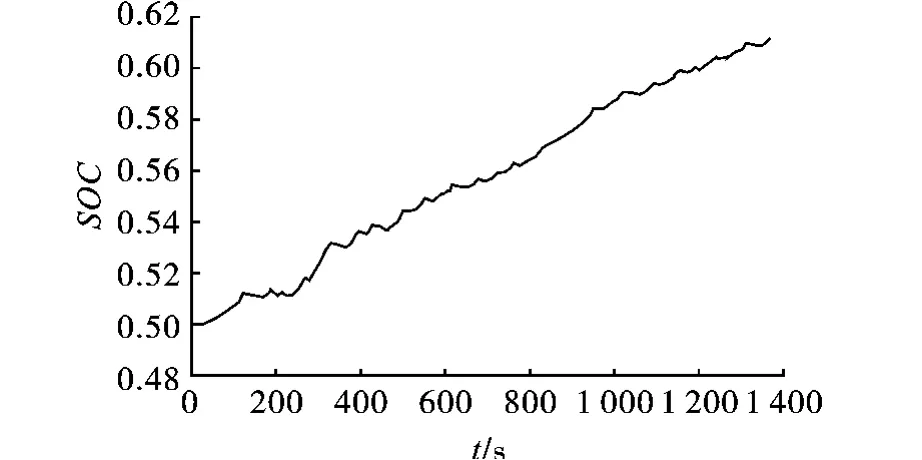
图6 模糊逻辑策略的再生制动能量回收的SOC变化曲线
由以上两条SOC仿真曲线可知,制动减速过程中,ADVISOR中原有的再生制动能量回收策略的SOC值由初始值0.500升到0.585;模糊控制策略的再生制动能量回收的SOC值由初始值0.500升到0.610。对比可知,所给出的模糊逻辑策略能回收更多的能量。
5 结论
HEV再生制动回收的电能可以减少燃油的使用,节约能源,提高汽车行驶里程,减少有害气体的排放,有良好的环保作用;还可以减少机械刹车系统的损耗,提高整车能量的使用效率。因此,再生制动能量回收是混合动力电动汽车一个极其重要的研究方向。采取的模糊逻辑策略,在保证制动安全性和舒适性的前提下,合理地分配再生制动力矩和摩擦制动力矩,最大限度地发挥电机的再生制动特性,尽可能多地回收车辆制动时的能量。由以上两条仿真曲线知,给出的模糊逻辑策略能更好地实现能量回收。
[1] 李兴虎.混合动力汽车结构与原理[M].北京:人民交通出版社,2009:32-98.
[2] 陈家新,江建中,江信尧.电动车能量再生控制及其可靠性研究[J].电气传动自动化,2002,24(6):30-33.
[3] 张毅,杨林,朱建新,等.电动汽车能量回馈的整车控制[J].汽车工程,2005,27(1):24-27.
[4] 舒红,秦大同,胡建军.混合动力汽车控制策略研究现状及发展趋势[J].重庆大学学报,2001,24(6):28-31.
[5] 刘皓春,全书海,王玉林.电动汽车驱动控制新技术[J].武汉汽车工业大学学报,1996,2l(3):10-13.
[6] 张世亮.车辆制动能量回收装置的研究[J].机械设计与制造,1999,28(4):22-24.
[7] JOHNSON V H.Battery performance models in ADVISOR[J].Journal of Power Sources,2002,110(2):321-329.
[8] MOTOAMA S,UKI H,ISODA K.Effect of traction forcedistribution control on vehicle dynamics[J].Vehicle System Dynamics,1993(22):455-464.
[9] GEORGE F M.A fuzzy logic controller for ABS braking system[J].IEEE Transaction on Fuzzy Systems,1995,3(4):381-388.
[10] ZHANG J M,SONG B Y,CUI S M.Fuzzy logic approach to regenerative braking system[C]//IEEE 2009 International Conference on Intelligent Human-Machine System and Cybernetics. [S.l.]:[s.n.],2009:451-454.