辐射制冷器用纤维支撑系统的工程化研究
2011-07-30刘丁臻
刘丁臻 陆 燕 李 忠
1 引言
空间辐射制冷是利用宇宙空间自然的高真空、深低温(约4 K)和黑热沉等有利条件,根据辐射传热原理,通过结构的特殊设计,使其不断向空间辐射热量,同时尽可能多地屏蔽外部热流,以达到被动制冷的目的[1]。两级制冷的辐射制冷器一般由外壳、中间级(亦称一级)、制冷级(亦称二级)和级间支撑等几部分组成,其中级间支撑的主要作用是将辐射制冷器外壳与一级之间、一级与二级之间有效地连结起来,保证辐射制冷器结构完整性和红外相机光学准直要求,同时又要最小化级间的传导漏热。
随着航天技术的不断发展,对红外遥感仪器的探测性能指标不断提高,致使探测器元数增加,探测波段不断延伸,辐射制冷器的制冷量和制冷温度指标不断地刷新历史记录。探测器元数增加不仅增加了对制冷量的需求,而且也加大了制冷级组件的尺寸和重量。这就对辐射制冷器级间支撑的绝热和机械性能提出了更加苛刻的要求,辐射制冷器的级间支撑导热造成的热负载是各级热负载的重要组成部分,降低级间支撑的传导漏热是有效提高辐射制冷器制冷性能的主要措施。但同时又要能够承受卫星发射和轨道上各种复杂力学环境条件的考验,级间支撑必须具有足够的刚度和机械强度,确保探测器焦平面的位置精度。因此,级间支撑系统设计已成为星载辐射制冷器热设计和总体结构设计的关键[2]。
随着复合材料的不断发展和成熟,越来越多的级间支撑采用了复合材料,目前中国已成功应用的级间支撑大多是环氧树脂与某类纤维复合成带状或筒状[2]。支撑带或支撑筒的力学和热学性能依赖于纤维和环氧树脂的配比、成型工艺以及成型时的固化温度、时间、压力等,即使同批次成型的支撑带或支撑筒,它们的弹性模量和抗拉强度也存在较大的差异。国外在超绝热的低温系统中,已转向直接用高分子纤维悬吊的技术,将低温组件悬吊在高温体上。英国的詹姆斯·克拉克·麦克斯韦望远镜(JCMT)[3]中,SCUBA-2视场亚毫米波成像观测仪,采用的焦平面探测器要求工作在mK级温度,超低的制冷温度,形成了复杂的制冷探测器组件如图1所示。用于将冷量传输至探测器阵列的冷链处在mK级温区,在冷链周围就是1 K温区的箱体,所以在mK温区和1 K温区之间良好的绝热是设备顺利运行的关键。在此系统中采用了Keval纤维绳悬挂处于mK温区的冷链,与周围1 K的箱体进行隔热安装。表1给出了探测器部分的热负载数据,由此可见Kevlar漏热仅占总热量的2%,是理想的隔热支撑材料。
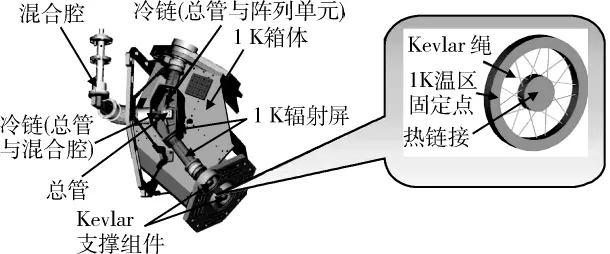
图1 1 K箱体和探测器组件Fig.1 1 K box and detector units
上海技术物理研究所是国内辐射制冷器主要研究单位。在传统的复合材料带状和杯状隔热支撑上已取得了成熟的工程应用经验,在此基础上,对纤维支撑进行了初步探索,已取得了一些应用经验[4],如纤维的预紧、纤维的胶接工艺、整体吊装工艺等。但在工程化应用中,还存在一阶固有频率低的问题,本文总结了对此所做的工程化研究,并将应用于未来新型辐射制冷器中。

表1 mK级温区热负载Table 1 Power loading on millikelvin stage
2 纤维支撑系统的优化设计
2.1 结构优化设计
柔软的纤维绳用于支撑刚性物体,充分利用其抗拉性能,将被吊装的物体通过纤维绳的“之”字状布置后拉紧形成刚性连接。吊装的纤维支撑系统一般为轴对称结构件,其优化设计的主要任务就是合理布置纤维绳的周向张角和轴向张角,使系统的刚度达最大。在辐射制冷器中被吊装的部件是二级探测器杜瓦组件,在有限的空间中,周向纤维绳数量也是结构刚性的影响因素。同时结合实际吊装的可实现性,经优化设计后的纤维支撑系统结构如图2所示,上下两组各6根纤维绳,形成稳定的结构。
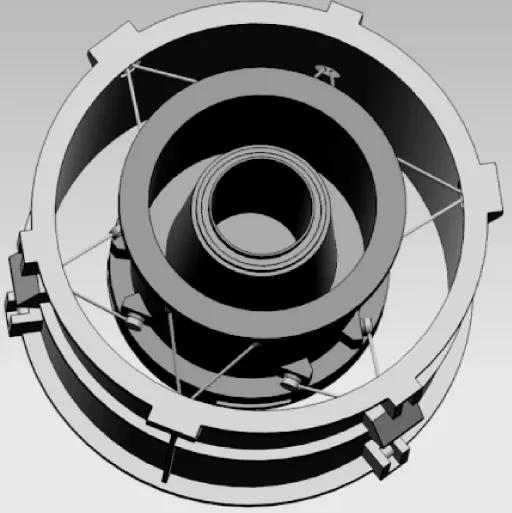
图2 新纤维支撑系统三维图Fig.2 3-D model of new fiber support system
2.2 纤维绳接头组件的设计
纤维绳一般具有很高的抗拉强度和拉伸弹性模量,但抗压性能几乎为零,并且对于承受剪切力的能力较弱。因此在拉伸结构设计中尽量避免纤维受剪切力作用,本文选择了成束的进口芳纶纤维原丝,在纤维绳制作及其与金属接头胶接上经过反复试验,形成了成熟的制作工艺规范,包括粘接胶水的选择、胶接固化时间等,保证胶水对纤维绳抗拉性能的影响降至最低,充分发挥纤维自身优异的抗拉强度和拉伸弹性模量。图3所示为纤维接头组件最大拉断力试验时的曲线,由8束芳纶纤维原丝组成一股纤维,最大拉断力接近2 400 N。

图3 纤维绳接头组件最大拉断力曲线Fig.3 Maximum tensile load curve of fiber rope connector module
3 系统准静态分析和模态分析结果
3.1 模型的建立
采用实体建模后导入Ansys软件进行网格划分和力学分析。为提高计算效率,实体建模时,对不影响精度的倒角和安装孔等细节部分简化处理。划分网格时,纤维绳的直径大约0.9 mm左右,与模型中其它部件尺寸相比,相对较小,需要对纤维绳模型以及与纤维绳接触面等部位进行局部网格加密。整个模型共划分191 058个网格节点,其中加密后的单根纤维绳有7 040个网格节点。图4为纤维支撑系统的网格划分情况(图中隐藏了冷块配重块部分)。
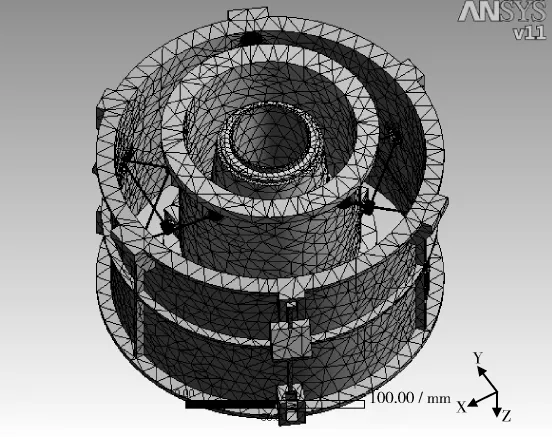
图4 纤维支撑系统网格划分Fig.4 Meshing of fiber support system
3.2 准静态分析
根据试验要求,对纤维支撑系统进行简化和建模,划分有限元网格。分别沿X、Y、Z方向施加8 g的惯性力,计算系统3个轴向的准静态响应,输出关键部位(包括12根纤维、一级壳体、杜瓦外壳)的位移和应力。边界条件按照实际装配情况,对一级壳体上6个支撑固定点施加约束,限制其6个方向的自由度。表2给出了X、Y、Z 3个方向准静态分析结果。

表2 X、Y、Z各向准静态过载分析结果Table 2 Results of static analysis
3.3 纤维预紧力计算
由于纤维材料只能受拉不能受压,所以在使用时,必须将纤维绳进行预紧才能使用,预紧力须大于纤维绳在准静态过程中所受的最大压力。本文采用的纤维吊装组件中,纤维绳的直径约为0.9 mm。由表2可知,纤维绳最大应力为 101.54 MPa,如图2所示,纤维绳组件共有2根,两根之间的张角为θ,则每组纤维绳组件最小预紧力公式Fmin=2[σS]cos(θ/2),其中 σ 为最大压应力,S为纤维绳截面积。
3.4 模态分析
模拟纤维支撑系统的结构因发射时,力学环境可能引发的振动模态,对其整体结构强度、共振频率和模态振型进行分析。结果见图5,纤维支撑系统的第一阶频率为151.6 Hz,表现为杜瓦上下振动。分析结果表明,此结构大大提高了杜瓦系统的抗振性能,满足工程应用的要求。
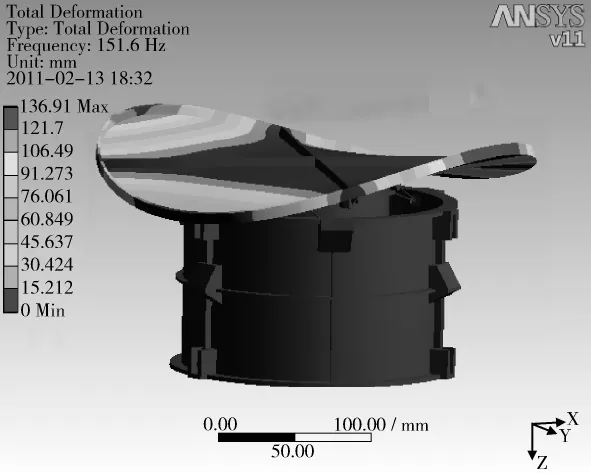
图5 系统模态分析结果Fig.5 Result of modal analysis
4 振动试验及结果分析
在卫星发射过程中,组件的抗振性能十分重要。通过对纤维支撑系统进行振动试验,以确保在相应的力学环境下,系统不会被破坏。振动条件示于表3、表4中。
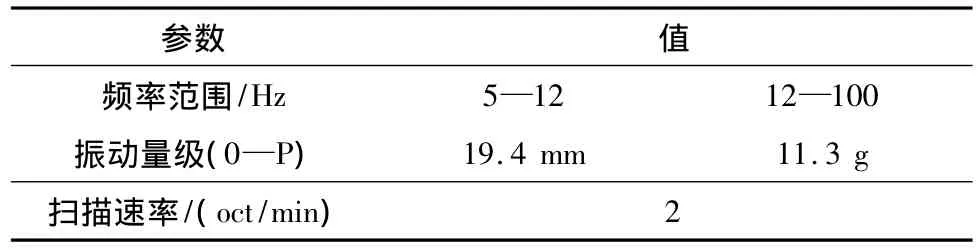
表3 正弦扫描量级Table 3 Magnitude of sine sweep
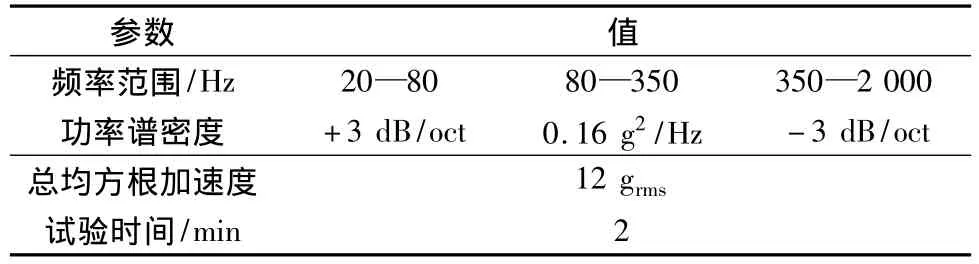
表4 随机振动量级Table 4 Magnitude of random vibration
按照以上量级,分别在X、Y、Z三轴向进行振动试验,结果总结如下:
(1)在正弦扫描振动的过程中,系统在100 Hz范围内,未出现共振点;
(2)在随机振动的过程中,一阶共振频率发生在120 Hz左右,表现为沿杜瓦轴向的上下振动;
(3)试验结果表面该系统具有较好的刚性,结构稳定。为研制更大冷量的辐射制冷器提供了思路和解决办法,为红外元器件提供一个稳定的低温平台。
5 结论
主要针对新型辐射制冷器的级间纤维支撑系统做了吊装结构的优化设计。通过Ansys有限元分析软件,对系统进行准静态过载分析和模态分析,得出的预紧力满足力学环境要求,并通过振动试验验证了该优化设计的合理性,可以转入实际的工程应用中。
1 陆 燕.近极太阳同步轨道抛物面型辐射制冷器的理论研究[J].低温工程,1999(4):108-114.
2 朱建炳,潘雁频.星载辐射制冷器支撑带系统设计[J].低温工程,2000(2):18-23.
3 Adam L Woodcraft,Fred CGannaway.Thermal design of the SCUBA-2 instrument detector stage and enclosure[J].Proceedings of the SPIE,5498.
4 王力平,陆 燕.新型辐射制冷器用纤维支撑系统的设计和分析[J].低温工程,2007(2):15-20.
5 朱建炳,王小军,潘雁频,等.模态分析在辐射制冷器设计中的应用[C].第七届全国低温与制冷工程大会会议论文集,2007:95-103.