三取二平台的时钟同步算法
2011-07-30潘雷
潘 雷
*卡斯柯信号有限公司 工程师,200071 上海
1 时钟同步介绍
高安全性、高可靠性系统经常会使用三取二平台作为系统处理器,尤其在铁路信号领域中,有些设备可能需要持续工作几年甚至几十年,并且系统安全完善度等级需达到SIL4,这些需求对硬件的搭建提出了许多苛刻的要求。在搭建三取二平台中,最重要的有2个功能:第1个是时钟同步;第2个是数据同步,也称为数据一致性比较。这里主要介绍时钟同步算法。
三取二平台中,3个通道独立工作,但需要进行准确的时钟同步,否则无法获取相同的输入值,也无法获得一致的运算时序,最终就无法进行三取二的运算而获取正确的结果,所以时钟同步对三取二平台而言是最为基本的功能需求。
在三取二平台的时钟网络中,由于3个通道分别工作,时钟是独立的,故系统无法得知真正准确的绝对时间。时钟同步的概念就是3个系通过某种算法协商出一个时间,同时需要证明这个协商出来的时间是一个最优的时间估值。
时钟同步理论中,一般将时钟同步分为2类:紧耦合时钟同步和松散耦合时钟同步 (又称宏时钟同步Macro-Synchronisation)。紧耦合时钟同步是指在同一个时钟控制下,所有CPU的执行时钟完全同步。从IEC61508中得知,三取二系统如果需要达到更高的安全性,需要降低三系之间的耦合度,以降低共模系数。在国外的一些三取二系统中,人为地让三通道错开一个小的间隙 (tick)进行运算,就是为了降低共模系数;同时由于现在的CPU内部都有锁相环,所以严格的物理时钟同步已经不现实了,现在广泛应用的三取二平台一般采用松散耦合的方式进行时钟同步。
这里主要讨论松散时钟同步方式。松散时钟同步下还有2类实现方式:硬件实现和软件实现。在本质上,这2种方式并没有什么区别,只是时间同步精度的差别。由于软件时钟同步需要一定的运算开销和数据传递开销,所以在时钟同步精度上无法和硬件时钟同步相比,通过对2种时钟同步方式进行验证后发现,相同的同步算法精度在2种情况下会相差一个数量级。
2 时钟同步基本概念
通过对相关参数进行数学量化,能够比较时钟同步算法的优劣。
2.1 时钟周期

这里关注的是T,为逻辑时钟,也就是需要同步的时钟;t为物理实际时钟,而C就是时钟同步方程。
2.2 时钟漂移
一个正确的物理时钟应该有一个正常的漂移范围,假设t2>t1,则:

其中,ρ为最大物理时钟偏差,一般由时钟源的物理特性决定,从时钟提供者的数据手册可以查到,公式说明时钟漂移为有界的,正确的物理时钟与实际时间是线性关系。i代表通道号。
2.3 一致性
相同正确的物理时钟之间有一个正常的摆动范围:

其中,i和j代表通道号;δ为同一频率的不同时钟之间的最大摆动。δ有界,它也是问题所在。如果时钟完全一致,那么也不存在同步问题。正是由于不同通道之间存在摆动,才有时钟同步问题,因此这个参数就是我们重点关注的。
2.4 精确性
存在常数γ>0,它和a、b常数一起使得如下公式成立:

也就是时钟在有限时间内的误差可以被2个线性函数包含,即绝对误差有界。这也是同步时钟追求的,也就是说,不但要同步而且要精确。
在设计时钟同步器时,首先需要有这2个要求,然后才能提出合理的解决方案,选定不同参数去满足这2个需求。
满足一致性条件表明正确逻辑时钟之间的最大偏差是有界的;而准确性条件表明正确的逻辑时钟与实际时间是线性关系。
需要注意到γ是逻辑时钟漂移率的一个边界,同时它也是逻辑时钟的准确性。我们只对那些γ值最小的时钟同步算法感兴趣。而精确性公式 (4)能够证明γ≥ρ,所以只对满足这个条件的算法有兴趣。如果一个同步时钟算法是最优的,那么必须满足:任k≥1,t∈[endk,endk+1] ,满足如下

其中a,b与算法的初始化相关。
3 集中-非平均方式同步算法
在时钟同步算法中,有如下几种方式:集中方式、一致性方式和概率方式。这里不做详细介绍,比较常用的方式是集中方式,其下面又有集中-平均方式和集中-非平均方式。为了避免一个通道的失效影响到其他通道 (称为拜占庭式失效),集中-平均方式需要至少4个及以上通道,才能做到避免拜占庭失效,它的理念基本上是取平均数,由于不适合三取二模型,这里也不做介绍,这里只介绍集中-非平均方法,适用于三取二的方式。集中-非平均方式同步方程涉及以下内容。
m为最大容忍错误通道数,n为通道数,需要满足如下条件n≥2m+1,在三取二中,n=3,m=1;每一个通道都周期性的寻求时钟同步 (分布式时钟同步),每一个通道到达自己时钟周期时发布同步信息,同时在给定时间窗内接收到达的时钟同步消息,如果接收到m+1即2(如果是三取二的话,m=1)条信息,立刻启动同步,同时将接收到的信息向其他所有通道转发。见图1。
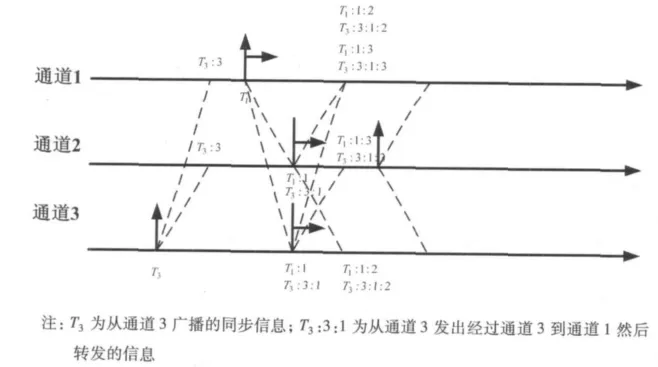
图1 通道时钟同步图
从图1中可以看出,假设通道3最快,通道1其次,通道2最慢。通道3最快而最先到达周期节点,那么它广播自己到达的消息给所有通道,然后等待。通道1第二快,它在自己的一个给定窗口内接收到来自通道3的同步信息,然后过一段时间它又接收到自己到达的消息,这个时候它相当于接收到了2个通道的同步消息了,可以重新启动同步计数器,并认定已经同步,同时将自己的同步消息广播出去,并传递所有接收到的消息给其他所有通道。
这个时候通道3接收到了通道1广播的消息和传递的消息,通过消息认定已经有2个通道到达同步了,也可以启动自己下一个同步周期。同样通道2接收到通道3广播过来的同步消息和通道1广播和传递的消息,通过消息确认也发现有2个通道已经到达了,所以不用等待自己的时钟周期是否真的结束,立刻重新启动新的时钟周期来保证同步。
本时钟同步方式并不是以最快的时钟为准,而是以中间的时钟为准,这里给出这个方程的一致性结果,如 (5)式,表1为 (5)式变量。


表1 变量参数表
d为信息传播延时 (通信延时加上消息验证延时),上式近似为δ≈d+2ρR,在给定δ下,可以反推其他参数,这样就能设计出符合要求的定时器。
在试验中使用硬件和软件2种方式进行验证,R=1ms,即同步时钟周期为1ms,软件采用高速串口传输;硬件采用TTL电平互联,由于串口传输和验证d=50 μs,所以,软件方式的δ≈50 μs,而硬件传输延时可忽略,δ≈d+2ρR ≈2ρR < 1 μs,试验结果与上述数据相当,可见使用此方法进行时钟同步可以取得比较好的同步效果。
4 初始化、升级操作
初始化操作:这个算法本身就带有明显的修正能力,在初始化过程中使用上述方式就能够完成初始化,只是初始化时对一致性没有要求,但是正常操作时,如果通道之间的一致性差别大于某个阈值的话,需要切断该错误通道。
升级操作:如果三取二降级为二取二后,经过维护,再次升级到三取二模式,当一个通道p想加入一个系统时,它发送 (加入)消息给系统中当前的所有通道,然后从这些通道接收到消息,被告知当前系统是出于哪个时钟同步阶段k,由于p可能是在同步周期的中期阶段开始它的算法,因此它要等到系统进行下一次时钟同步时方可加入。当通道p接收到k+1次时钟同步消息时,它将开始其逻辑时钟
5 结论
可以证明这种时钟同步方式可以达到最优同步时钟的要求,同时这样的时钟同步器也比较适合三取二系统中使用。
这种时钟同步器可以由软件方式实现,本项目组通过使用串行通信在1 MHz时钟下,完成1 ms的时钟同步,误差在10 μs左右,同时也在硬件中完成相同的实现,精度在1 μs左右。
[1] Srikanth& Toueg.Optimal clock synchronization.Journal of the ACM .1987:624-645.
[2] David Powell.Generic fault-Tolerant architecture for real- Time dependable systems.Kluwer Academic Publishers.2001:27 -34.
[3] Lundelius-Welch & Lynch.A New Fault-Tolerant Algorithm for Clock synchronization.Information and Computation .1988:1-16.