惯性保险引信安全状态数字化识别技术
2011-07-23徐建国金昌根崔云航
徐建国,陈 玲,金昌根,崔云航
(武汉军械士官学校,武汉 430075)
引信是否处于安全状态直接影响着引信的储存、运输和使用安全性。确定引信的安全状态通常有两种方法[1]:一是人工分解检查,二是引信X光成像后人眼识别。由于引信内部有含能元件,人工分解存在一定的安全隐患;人眼易疲劳,容易造成误判。另外,事故引信的安全性一直没有合适的检测手段,一般进行现场销毁,事故发生后到底对引信安全性和可靠性产生什么样的影响无从考证,不能为引信改进设计、技术处理和应用提供决策依据。所以,急需寻求一种能够安全、可靠判定引信安全状态的方法,以解决引信安全状态自动化判别的难题。目前国内中北大学等单位已完成复杂产品装配正确性自动检测技术与系统研制并在工程上应用[2-3],充分说明以数字化图像处理与识别技术为基础,根据惯性保险引信X光图像中所反映的零部件位置、灰度和形态等特征,建立保险钢珠状态的识别算法,实现引信安全状态数字化识别是完全可行的。
1 某型引信惯性保险机构特征
模型引信惯性保险机构组成如图1所示。正常状态下,保险钢珠下压惯性筒,惯性筒束缚两个下钢珠,下钢珠卡住击针,构成保险状态。发射时,在惯性力作用下,惯性筒压缩惯性筒簧并下移,释放保险钢珠,当惯性筒簧所受的惯性力小于惯性筒簧抗力时,惯性筒上移,释放下钢珠,从而解除对击针的约束,完成解除惯性保险的过程。通过其结构和解除保险过程来看,只要保险钢珠处于正常状态,引信就处于安全状态,所以,在引信安全状态数字化识别时,应重点解决保险钢珠的状态识别问题。

图1 某型引信惯性保险机构组成
2 保险钢珠状态数字化识别算法设计
要进行保险钢珠状态检测,首先要找到引信在X光图像中所处的位置,然后划分检测区域并进行进一步精确确定,以提高识别速度,最大限度地降低背景信息对识别精度的干扰,最后设计保险钢珠存在与否的算法,实现对钢珠状态的判定。
2.1 引信位置的寻求与校正
2.1.1 引信水平方向基准的确定及位置校正
利用引信图像中心对称性,借助引信水平方向左右两半区域像素灰度值相减的绝对值最小准则,并考虑图像可能发生倾斜等因素,采用在一个小范围内遍历二维倾角算法[4],确定最佳图像中心对称轴,同时进行引信图像的倾斜校正。引信原始图像及中心对称轴定位结果如图2所示。

图2 引信原始图像及中心对称轴定位结果
2.1.2 确定引信图像垂直方向基准
利用中间冠状结构厚度为引信全局最厚、透光率极低,在水平投影图中对应位置呈现全局最暗的特点,采用最优投影技术[5],确定引信上下半部水平基准面的垂直方向位置。垂直方向基准定位结果图像如上图3所示。到此,确定了待测引信在X光图像中所处的位置。
2.2 引信轮廓的确定及检测区域的划分
2.2.1 引信图像尺度归一化
由于采用负片扫描方式输入图像,二维空间分辨率一致性难以保证,算法选择特征比较明显、容易精确测量的引信下部圆柱体外径,作为引信缩放比例的基准,使所有引信图像尺度、方向和位置统一,图4为采用最优投影技术算法得到的归一化基准。
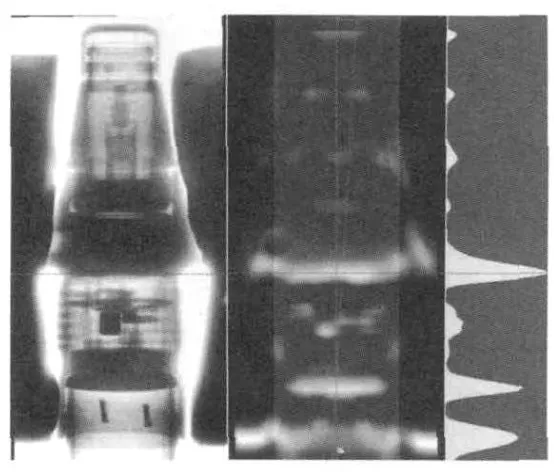
图3 引信图像垂直方向基准确定结果
2.2.2 建立引信图像外轮廓模型

图4 归一化基准的确定
2.2.3 检测区域的划分
在确定了引信外轮廓的基础上,为了提高识别可靠性,根据引信结构特征,对标准引信图像进行原理上分区。如图6所示,A区域表示上钢珠检测区域,B区域表示惯性筒簧检测区域,C区域表示回转机构检测区域。
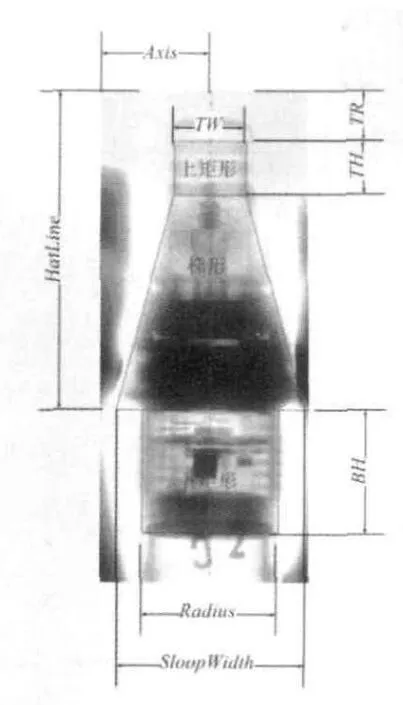
图5 引信外轮廓确定结果
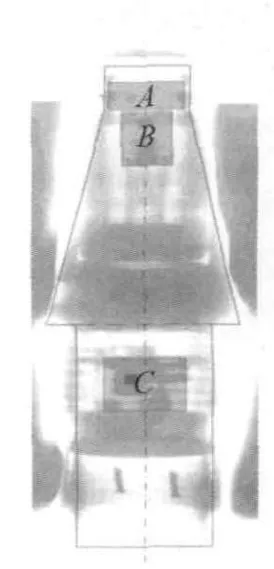
图6 检测区域划分
2.2.4 钢珠检测区域的精确定位
为了保证识别的靠性,还需进一步精确确定保险钢珠正确位置区域。
(1)精确检测区域边缘垂直方向定位 首先根据已经计算出来的外轮廓估计出水平辅助边缘的大致区域,在区域内采用水平方向边缘滤波器进行滤波,然后在水平方向进行投影,并寻找投影曲线的极值,极值所处位置即对应着水平边缘的垂直方向坐标,如图7所示。
(2)精确检测区域边缘水平方向定位 精确检测区域边缘水平方向定位方法与上述过程类似,不再详细描述,结果如图8所示。

图7 垂直方向精确定位结果
图8 水平方向精确定位
2.3 保险钢珠识别算法的设计
引信X射线图像中,钢珠一般表现为局部黑色斑团。算法假设圆形钢珠像素点个数(面积)的大致范围已知,选择钢珠面积作为门限,那么在理想情况下,钢珠附近区域低于该门限的像素分布应该全部或者主要处于钢珠所在区域内。如图9所示,较暗的像素应该全部分布于A区域内,B区域内的像素数值取值应该普遍高于A区域内像素。因此可以通过面积门限分割之后的图,比对圆形面积A内外侧目标像素的数目,来确定是否存在圆形暗斑。

图9 钢珠检测假设原理图
为了增强钢珠区域的斑团特征,抑制周边大片类似暗区域,首先采用形态学“闭操作”[6-7]进行滤波预处理,检测出图像中可能存在的钢珠图像。然后,对滤波后的图像建立如下准则函数:
式中fclose(m,n)表示形态学闭操作之后的结果图像;threshold数值为从最暗像素起第“A区域面积”个像素所对应的灰度数值;A为以(x,y)为中心点的检测区域,A区域长宽设置为中心点(x,y)上下左右8个像素范围;B区域设置为中心点(x,y)上下左右16个像素范围。该准则是关于A区域中心点坐标的函数。在检测区域内遍历(x,y)的所有可能位置,寻找最优值所在的位置作为最终结果位置:

同时通过考察测试图像样本最优值分布情况设置确认门限gate,来对当前检测区内是否存在钢珠做出判决:

通过对现有引信图像样本分析,可以发现gate取值在1.5左右一个较宽的范围内都可以达到100%的正确识别率。上钢珠检测结果图像如图10所示,当检测到上钢珠不存在时,软件系统报警。

图10 保险钢珠状态检测结果
3 软件识别系统设计及结果判定
为了实现高可靠性自动识别和可靠操作性能,应用C语言进行算法编程[8],应用Interbase建立标准引信图像和检测结果两个数据库,应用C++Builder完成程序界面设计,实现识别过程的人机交互。识别结果界面如图11所示,识别程序流程如图12所示。
图12 识别程序流程
4 结语
利用最优投影及形态学滤波技术,根据某型惯性保险引信X光图像中所反映的零部件位置、灰度和形态等特征,建立保险钢珠状态的识别算法,然后应用C语言进行算法编程,应用Interbase建立标准引信图像和检测结果两个数据库,应用C++Builder完成程序界面设计,实现识别过程的人机交互,实现了惯性保险引信安全状态数字化识别,解决了惯性保险引信安全状态自动化准确判别的难题。
[1]总装备部通用装备保障部.引信技术手册[M].北京:国防工业出版社,1978:148-152.
[2]张怡,徐新乐,张国珍.引信装配射线检测图像自动处理系统[J].无损检测,2008,30(4):223-225.
[3]韩炎.引信装配射线检测图像自动处理系统[J].无损检测,2008,30(4):223-225.
[4]张聪,张慧.复杂背景下二维条码图像的提取[J].微计算机信息,2007,23(30):302-303.
[5]周代英.基于最优投影平面的雷达目标一维距离像识别[J].系统工程与电子技术,2004,26(8):1030-1032.
[6]钢铁,王东华.基于自适应形态学滤波的X射线图像的缺陷提取[J].机械工程学报,2001,37(5):85-89.
[7]方黎勇,李柏林,何朝明.基于自适应形态学滤波的ICT图像缺陷提取[J].西南交通大学学报,2009,44(1):41-42.
[8]潭浩强.C程序设计[M].北京:清华大学出版社,2002:309-327.