飞思卡尔杯B型车模机械部件的改进探讨
2011-07-16刘南昌李全王宏曾水旺黎天左
刘南昌,李全,王宏,曾水旺,黎天左
飞思卡尔杯B型车模机械部件的改进探讨
刘南昌,李全,王宏,曾水旺,黎天左
(五邑大学 信息工程学院,江门 广东 529020)
针对B型车模存在的底盘太高、减震器过于灵敏、舵机响应慢、测速码盘安装不便等问题,经过系列改进,通过压缩弹簧以降低底盘重心和减轻减震太软带来的震荡;选择合理的定位参数,提高了小车行走的稳定性及控制的灵敏度;舵机、测速码盘合理安装,提高舵机响应速度,为智能车快速、平稳前进、转弯以及制动控制提供更好的基础.
飞思卡尔杯智能车大赛;B型车模;底盘调整;四轮定位
“飞思卡尔”杯全国大学生智能车大赛已经成功举办了四届,为了增加大赛的挑战性及新鲜感,从第五届开始,大赛要求光电组和摄像头组使用B型车模. B型车模由玩具遥控越野车模改造而来,对于需要快速反应的竞速型比赛,B型车模存在不少问题,如底盘太高、减震器过于灵敏、舵机响应慢、测速码盘安装不便、四轮驱动控制等. 为适应大赛要求,需对B型车模做技术改进,本文针对上述问题开展了B型车模机械部件的改进研究,提出了有效的解决办法,经试验取得了较好的效果.
1 底盘重心及减震的调整
重心位置直接影响小车在高速过弯时的安全性能,重心太高会严重影响小车操控的稳定性,甚至造成失控等严重事故.[1]由于比赛赛道窄、半径小、表面平滑,B型车模在不加负载时底盘重心已高达3.05cm,这将严重限制小车的转弯速度;同时越野减震器太灵敏、起步刹车震荡明显,也对数据采集和速度控制不利. 为提高小车的速度和安全性,需要对B型车模进行底盘重心及减震的调整,具体有以下5种方法:
A.直接更换减震弹簧. 换成半径相近,长度较短或弹性较硬的弹簧;
B.缩短弹簧长度. 对现有减震弹簧进行适当剪切,缩短弹簧的长度;
C.调整螺杆长度. 通过调整减震器中轴中的螺杆长度以调整弹簧的长度;
D.通过调整前后桥上的一粒内六角螺丝来调整车身高度;
E.压缩弹簧. 拆开减震弹簧连杆的上盖,在内筒的螺杆里加装垫片,缩短连杆的长度.

图1 方法E改装效果图
经试验,方法A难以找到合适弹簧,且有犯规风险;方法B很难剪到合适的长度并保持四轮高度平衡,且剪切后弹簧不可恢复;方法C可调范围极小,只有0~1.0 cm,且影响螺杆的牢固性;方法D可调范围达不到要求,易单侧受力过大使车模底盘变形;方法E效果明显,如图1-a,在螺杆的轴心中各加了3~5片塑料垫片,弹簧从原来的4.63 cm缩短为4.10 cm(如图1-b),小车后座的底盘由原来的3.05 cm降到了2.15 cm,前底盘降到1.75 cm.
通过加装垫片的数量及厚度可以任意调整螺杆的长度,螺杆的缩短压紧了弹簧,增加了弹力,从而克服了减震器过于灵敏的问题,减少了行驶过程中因重心变化及震荡对赛道数据采集造成的影响. 降低车模重心的同时,底盘不易过低. 为了增强爬坡时的稳定性,车的后底盘应略高于前底盘,使重心前倾. 改造后,小车后底盘比前底盘高出约2 mm.
2 前轮定位参数的选择
前轮是转向轮,它的安装位置由主销内倾角、主销后倾角、前轮外倾角和前轮前束角等4个参数来决定,这些参数的调整对智能车直线行驶的稳定性、转向的轻便性及轮胎磨损有很大影响.
1)主销后倾角. 设置主销后倾角使车轮的方向自然朝向行驶方向,设定很大的主销后倾角可提高小车的直线行驶性能,同时增大主销纵倾移距. B型车模出厂时已经有了约2°的后倾角(如图2),故在安装后只做微调就能满足控制要求,可以在下横梁的前后端增减垫片进行调节.
2)主销内倾角. 主销内倾角使主销轴线与路面的交点到车轮中心平面与地面交线的距离减小,进而减小转向时驾驶员加在方向盘上的力,使转向操纵轻便[1]. 主销内倾角不宜过大,否则会加速轮胎的磨损、降低轮胎的附着力. B型车模可以通过改变减震弹簧上端的固定点对主销内倾角进行调整. 为了减少整车的震动,此次调整把主销内倾角调为5°(见图3),把弹簧上端固定在顶端固定孔,以降低底盘重心. 减轻舵机负载、提高舵机的灵敏度,使小车行驶更加稳定.
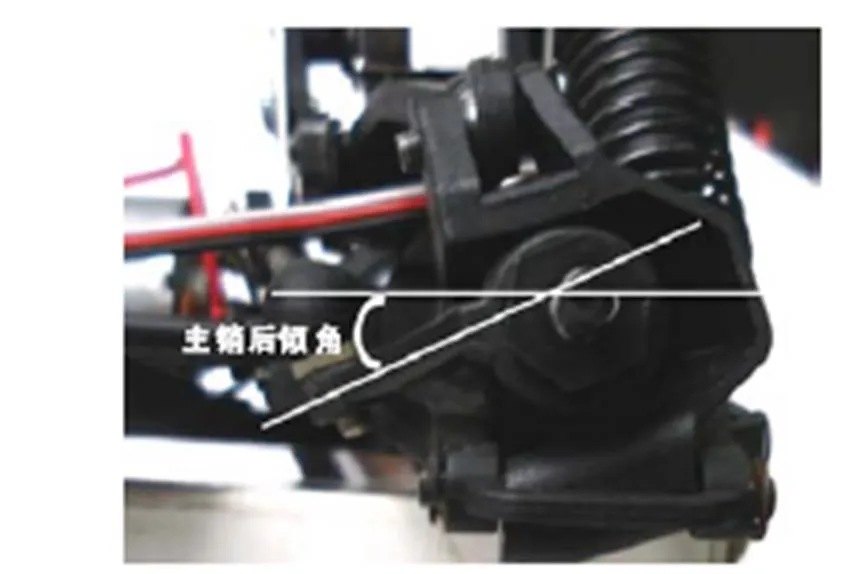
图2 B型车模前轮主销后倾角

图3 B型车模前轮主销内倾角
3)前轮外倾角. 从前后方向看车轮时,轮胎并非垂直安装,而是稍微倾倒呈现“八”字形张开,称为负外倾,而朝反方向张开时称正外倾. 由于轮胎的宽度比较大(达到2.8 cm),轮胎与车轮的半径(3.3 cm)比为0.85,故外倾角较小可防止轮胎磨损过快及附着力不足,经测试-2°为较理想前轮外倾角(见图4).

图4 B型车模前轮外倾角
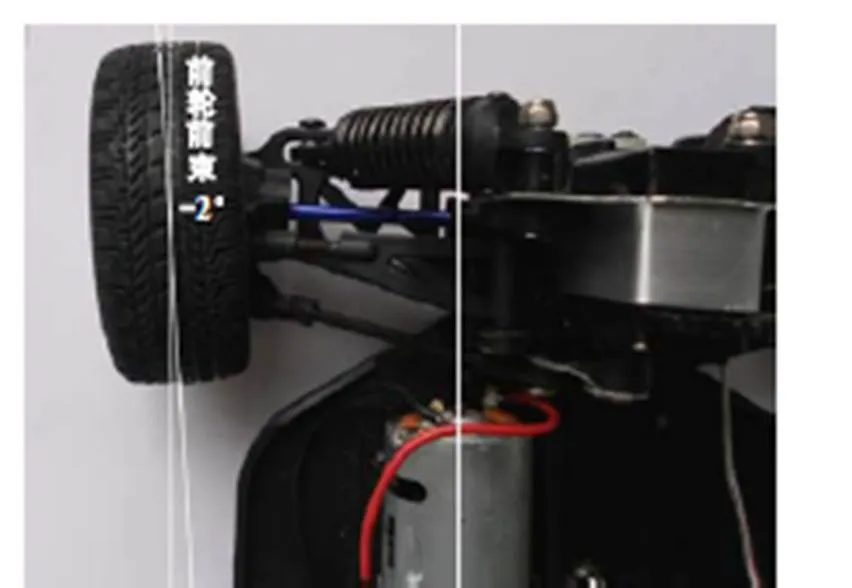
图5 B型车模前轮前束角
4)前轮前束角. 前轮前束角指的是左右前轮分别向内,采用这种结构目的是修正前轮外倾角引起的车轮向外侧转动的趋势. 前束角不当,不仅磨损车模,而且影响舵机以及整车的稳定性. 经测试,小车前束角设定为2°时直线行走更稳定,转弯自修正更快,但会增加舵机的负载,造成舵机响应略有延迟(见图5).
前轮的4个定位参数对小车行走的稳定性及控制的灵敏度都有很大的影响,而且参数间也相互约束,所以调校时要经过多次测试、对比才能使小车的控制达到最佳效果.
3 舵机的安装
B型车模的方向连动轴比较多,轴与轴之间连接的空隙较大、连接松动,易造成虚位,导致转向不灵活;又由于转向轮摆到左右极限时舵机需要转动180°,舵机摆动角度越大响应时间越长,因此经过理论推算及试验,提出了2套改进方案:
1)用铝片加长舵机的力臂1.45 cm,并把转向杆前端的连接点改为向上,防止出现转向杆拐角过大而卡死或者脱落. 但此时转向杆安装不了,只能把原塑料盖进行剪切,并用铝片把固定杆连接到舵机的支架,防止舵机的大推力造成整车震动以及固定杆的损坏,如图6-a.
2)参考A型车模舵机的安装方法,舵机直立安装,如图6-b.

图6 B型车模舵机安装方法
舵机改动前后的性能比较见表1,由表1可以看出:改动后舵机反应速度明显加快,左右极限反应时间由500 ms减少到125 ms. 综合比较,方案2的优势更加明显.

表1 舵机改装效果比较
4 测速码盘的安装
透射式光电测速是B型车模比较理想的测速方式,其精度完全能够满足控制需要且成本低.
4.1 测速电路
光电传感器采集回来的信号近似于锯形波,单片机不能直接识别,需要进行波形整形[2]. 一般用施密特触发器或电压比较器处理,本文选用电压比较器处理,具体电路如图7所示.
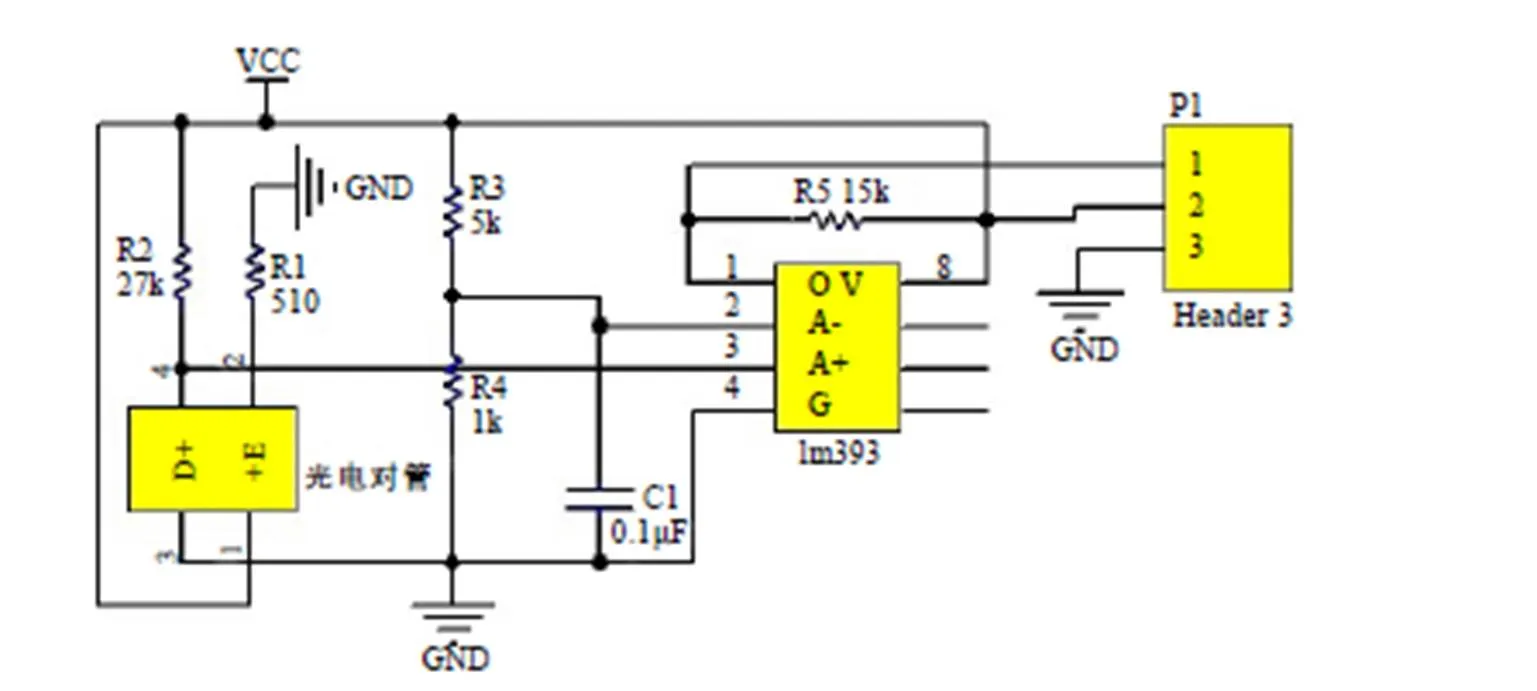
图7 电压比较器处理电路
4.2 码盘制作
首先用AutoCAD设计码盘样图,尺寸大小如图8-a. 为了保证码盘的精度和硬度,采用0.5 mm铁片进行制作,图8-b是我们用电火花线切割机床做出来的32扇的码盘.

图8 码盘的制作
4.3 码盘的安装及测试
B型车模有2个地方比较适合安装码盘:传动齿轮和电动机的齿轮. 由于电动机齿轮的结构问题,无法安装到位,故选择在传动齿轮上安装. 安装时要注意装好后的码盘与车模的其他部件之间的空隙,否则高速旋转的码盘可能会损坏传动齿轮和周围部件. 经测试(结果见表2),该测速码盘可以满足小车测速要求,实验证明,该方法完全能胜任小车PID控制速度反馈,并且效果很好.

表2 1 s内码盘在不同占空比下所测的脉冲数
5 结论
通过对B型车模一系列的改进后,车模底盘重心明显降低、减震器弹性更加稳定,小车后座的底盘由原来的3.05 cm降到了2.15 cm、前底盘降到1.75 cm;舵机左右极限响应时间由原来的500 ms减少到125 ms,响应速度比改前快3倍多;32扇测速码盘的安装到位,1 s内所测脉冲数达到4 500个. 这些改进为智能车快速、平稳地前进、转弯以及制动控制提供更好的基础,经改装的车模在第5届飞思卡尔杯全国智能车大赛中荣获华南赛区二等奖.
[1] 周晓飞. 汽车四轮定位[J]. 公路与汽车,2003(5): 8-9.
[2] 卓晴,黄开胜,邵贝贝,等. 学做智能车:挑战“飞思卡尔”杯[M]. 北京:北京航空航天大学出版社,2007.
An Exploration of the Improvement of the Mechanical Parts of the B-type Freescale Cup Cars
LIUNan-chang, LIQuan, WANGHong, ZENGShui-wang, LITian-zuo
(School of Information Engineering, Wuyi University, Jiangmen 529020, China)
There exist the problems of too high chassis, too sensitive shock absorbers, slow response of the steering, and the inconvenience of the installation of the speedometer in the B-type Freescale cars. A series of improvements can be made: shock can be reduced by lowering the gravity center of the chassis to reduce the vibration caused by too soft shock-absorbers; improving the stability and sensitivity of the control of the car in motion; and improving the steering response through reasonable installation of the steering unit and speedometer.
Freescale Cup Smart Cars Competition; the B-type car model; chassis adjustment; wheel alignment
1006-7302(2011)02-0056-05
TP242
A
2010-07-06
刘南昌(1985—),男,江西赣州人,硕士研究生,研究方向为模式识别、智能控制;李全,副教授,硕士生导师,通信作者,主要从事模式识别方面的研究.
