宇航员训练机器人卧推模式建模与控制
2011-06-23张立勋邹宇鹏
张立勋,邹宇鹏
(哈尔滨工程大学机电工程学院,黑龙江哈尔滨150001)
机器人辅助运动功能康复训练技术是机器人研究领域的前沿和热点,其目的一方面是为患者提供安全、高强度和以任务为导向的训练;另一方面有助于减轻医疗人员的负担,降低卫生成本[1].现有各种康复器械虽然能够在一定程度上满足了包括残疾人、伤病人及老年人的需求,但是对于失重环境下的宇航员而言却没有合适安全和以任务为导向的康复训练机器人.因此,为宇航员研制适用于失重环境的训练机器人,提高宇航员心理及生理的稳定性,保证宇航员的工作效率,对于我国载人航天事业的发展具有重要的意义.
目前,在国际空间站中宇航员对上身部分肌肉群的锻炼主要采用拉力器和抗阻力训练器(advanced resistance exercise device,ARED).拉力器结构简单、质量轻,但是功能相对单一,效果不明显[2];抗阻力训练器是利用真空产生负压的原理模拟自由负重器械对宇航员进行锻炼,但ARED体积和质量大,给原本空间有限的空间站带来很大的压力[3].卧推是仰卧推举的简称,主练胸部和臂部肌肉群.卧推参与的骨肉多,尤其对发展上肢伸肌和胸大肌有显著作用,是其他动作无法比拟的[4].卧推对于全面锻炼宇航员上肢力量,提高上肢作业能力具有重要作用.但是在太空失重环境下采用普通的杠铃进行训练将失去效果.因此,本文提出了一种基于柔索驱动的宇航员训练机器人,通过模拟真实负载实现航天员在太空微重力环境下进行卧推训练.文中通过分析卧推运动特性设计了机器人构型;研究了其可控工作空间及牵引力规划数学模型;针对人机系统的特性,提出基于位置内环的力外环控制策略;最后对人机系统进行仿真研究.
1 机器人构型研究
1.1 卧推运动的特性
人体在进行卧推训练过程中,上肢和横杠可能有的运动形式有:
1)根据需要训练部位的不同,卧推有斜上推、斜下推和平推3种训练方式.但是斜推对人体力量要求较高,在力量不足的情况下容易出现横杠脱落和肌肉拉伤等情况,不适宜用于失重状态下宇航员的训练.项目采取平推的方式,因此存在一个横杠沿人体矢状轴(见图1)移动的自由度.

图1 卧推训练自由度示意Fig.1 DOF of bench press training
2)考虑到人体双臂力量的不均衡,在平推的过程中可能出现横杠的倾斜,即存在一个横杠绕人体垂直轴转动的自由度.
3)在手部握紧横杠和臂部坚挺的状态下,不存在横杠绕自身轴线、冠状轴及矢状轴转动的自由度.同时,为了避免人体受到损伤,应通过机器人构型设计和控制避免横杠沿垂直轴和冠状轴2个方向的移动自由度.
综上所述,为了完成对人体上肢肌肉群的训练,同时避免人体受到损伤,人在卧推过程中横杠具有2个自由度,即沿矢状轴的移动和绕垂直轴的转动.按照文献[5]的分类,卧推模型的自由度类型为1R1T型,属于空间机构.
1.2 机器人结构模型
根据文献[6],1R1T柔索牵引并联机构不存在.因为对于任意给定的位姿,动平台(横杠)都无法满足力封闭的条件,机构是不可控的.机械人构型如图2所示.

图2 机器人构型Fig.2 Robot configuration
图2中,设固定坐标系为Oxyz,横杠坐标系为Pxpypzp.不考虑人体上肢对横杠的约束,根据螺旋理论,横杠所受的力螺旋平衡方程可以表示为

式中:F∈R6×1表示横杠在失重状态下所受的包括惯性力在内的力螺旋(不包括重力);T∈R6×1表示柔索张力矢量;W(X)∈R6×6为柔索矩阵,柔索矩阵可以表示为
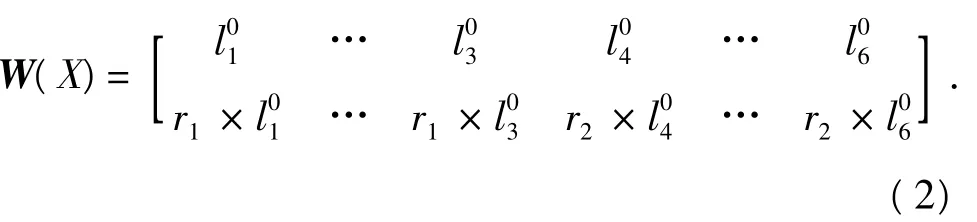
式中:r1=PP1,r2=PP2;Li=PmBi(m=1,i=1,2,3;m=2,i=4,5,6)为柔索矢量;li= ‖Li‖表示第 i根柔索的长度;l0i=Li/li为第i根柔索的正规化柔索矢量.
由卧推的运动特性可知,横杠在工作空间内有绕z轴(垂直轴)转动的非零力矩,即柔索矩阵W(X)的第6行与柔索张力矢量T的乘积非零,则必然无法保证W(X)的第3行与T的乘积在任意时刻都为零,即运动过程中存在沿z轴的横向力,整个机构失控.所以,单纯通过柔索牵引并联机构实现1R1T构型设计是不可能的.
宇航员训练机器人主要用来实现失重环境下宇航员卧推过程中的负载力控制.据此目的得出了机器人机构模型如图2所示.对本项目而言,虽然机器人是具有并联特征的不完整约束系统,但是人提供了系统的部分约束,人与柔索驱动机构共同组成了宇航员训练人机系统.从整个人机系统的角度考虑,系统具有完整约束的特性,整个系统是可控的.因此,在建模时只有将人机系统共同建模,模型才有意义.
由于项目采用平推作为宇航员卧推的基本训练形式,因此在训练过程中,宇航员的上肢仅在xoy平面内运动,人体的肩关节和腕关节也由原来复杂的多自由度关节简化为仅有一个自由度的转动关节[7].为了保证卧推训练的基本形式,简化控制系统,在该机构模型中,动平台(横杠)由6根对称分布的柔索牵引,柔索的一端按照3根一组的方式铰接在横杠的两端 P1和 P2上,横杠长度 lP1P2=1.5 m.柔索的另外一端连接在6组带有万向轮的柔索驱动单元Bi(i=1,2,…,6)上,6组柔索驱动单元均匀地分布在直径d=2 m的圆形机架上.在固定坐标系 Oxyz中,6组柔索驱动单元的坐标为在每根柔索中间分别安装一个拉力传感器来检测柔索张力,利用光电编码器检测直流力矩电机转速来计算柔索长度.
1.3 机器人可控工作空间
定义:对于6根柔索牵引的2自由度宇航员训练机器人,对于xoy平面内给定一个位姿X,如果存在柔索张力矢量T(T>0),满足W(X)T=F,则X属于可控工作空间.其中,F=F1+F2,F1和F2分别为横杠两端 P1、P2上柔索牵引力的合力,大小F1=F2,方向沿y轴负方向.
在不考虑卧推形式及人体各关节运动能力和范围对机器人限制的前提下,机器人的可控工作空间为2个三棱柱,其下限为机架平面,棱柱的横截面为ΔB1B2B3和ΔB4B5B6,如图2虚线三角形所示.在所要求的1R1T运动形式下,工作空间为xoy平面内2个矩形平面,其边界受三棱柱边界以及人体上肢卧推运动范围限制.较大的工作空间保证了机器人在面对不同使用者以及训练过程中特殊情况时具有较强的适应能力,增强了机器人的适用性.
2 柔索牵引力规划
柔索牵引力规划问题可叙述为:当给定的横杠的位姿X时,可确定柔索矩阵W(X),通过规划柔索张力矢量T,使得W(X)T=F.
在本文中,各个柔索张力之间不存在耦合,对于给定的负载力,各个柔索张力的解唯一.因此在计算绳索张力时不需要利用Moore-Penrose逆的办法[8].柔索张力矢量T可表示为

以横杠一端P1点的柔索牵引力规划为例,如图3所示.F1=F/2,l1=l3,t1=t3,P1P1'⊥ B1B2B3O',P1'B2=R/4.则单侧柔索张力矢量T1表示为

卧推过程中拟加载的负载力F可以表示为

式中:G为重力项,其大小固定不变;Fi为惯性力,其大小与横杠的加速度成正比.
对于本文所设计的机器人构型,虽然柔索张力之间不存在耦合,但是运动学上却是相互耦合的.由于机器人自由度类型为1R1T型,横杠仅会在xoy平面内运动,这就简化了机器人的运动学解算.横杠上柔索铰接点的运动可以表示为
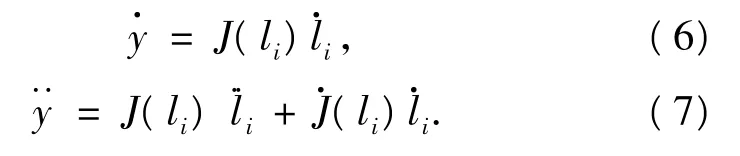
式中:li、lyi和分别为第i根柔索的长度、伸缩速度和加速度;J(li)是一个与机器人几何形状有关的函数表达式.
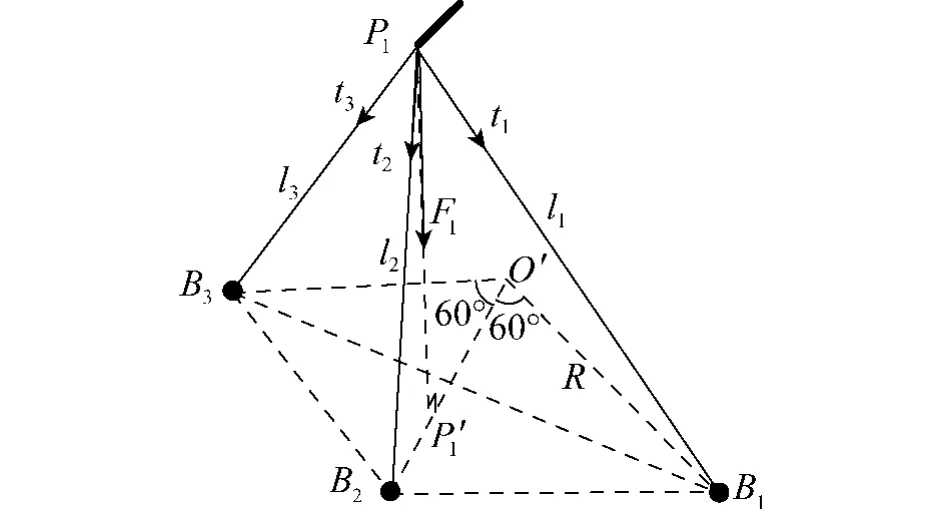
图3 柔索牵引力规划Fig.3 Wire tension distribution
3 基于位置的力外环控制策略
宇航员训练机器人控制器的主要目标是在跟随人体卧推训练姿态的同时,实现失重环境下卧推过程中的动态负载力控制.目前,基于力外环的方法已经成功应用到机器人的力跟踪控制中[9].本文基于力外环的思想,控制器采用基于位置内环的力外环控制策略.基于位置的力外环控制原理图如图4所示.如图4中,该方法是通过安装在柔索中间的拉力传感器测量柔索张力,力控制器的输出作为位置控制器的输入值,通过检测电机转速来计算柔索的长度和速度,在完成对横杠运动跟踪的前提下实现对人体的负载力控制.

图4 基于位置的力外环控制Fig.4 Position based explicit force control
该控制策略的优点是实现简单.但是其控制精度依赖于机器人位置控制器的精度,因此本文位置控制器采用基于速度内环的位置控制器,这样提高了位置控制器的精度,并且避免了因为换向速度变化造成力的波动.由于机器人采用柔索作为传动元件,控制对象为人体,人机系统刚度较小,因此避免了该控制策略在以往的使用过程中因为环境刚度较大而造成的系统不稳定.
4 人机系统的建模与仿真
4.1 人机系统建模
宇航员训练机器人主要是用于失重状态下的宇航员的体育锻炼,失重环境对人机系统模型的建立及其控制系统的设计都有重要影响.本文利用Matlab SimMechanics工具箱建立人机系统模型,通过设置Machine Environment模块,完成无重力环境的建立.人机系统模型分为人体上肢(包括横杠)模型和并联柔索机器人模型2部分.人机系统控制框图如图5所示.
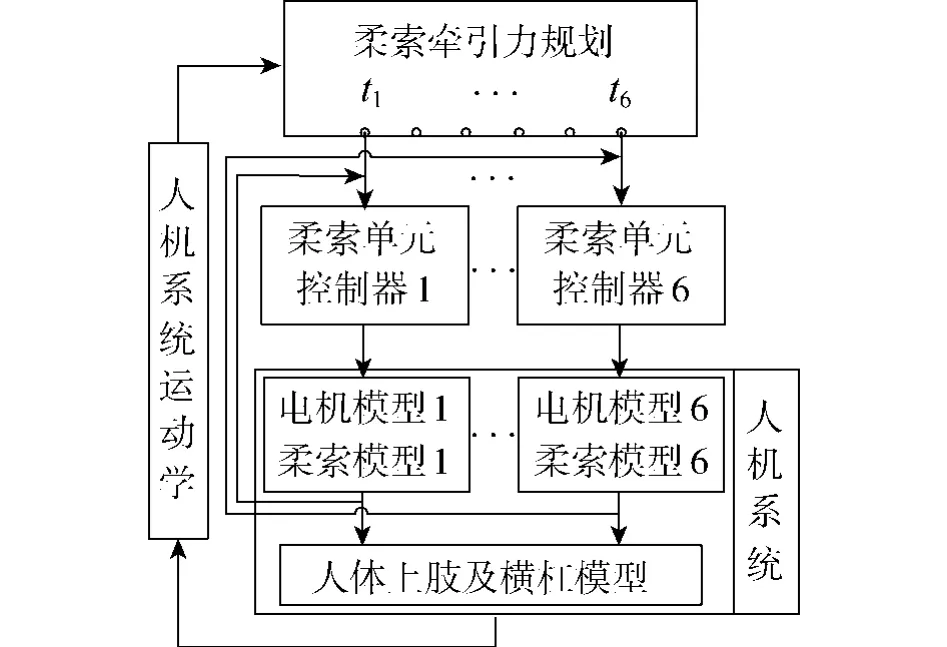
图5 人机系统控制框图Fig.5 Control system of man-machine system
机器人模型包括电机模型和柔索模型2部分.电机模型按照式(8)建立直流力矩电机的数学模型.其中,Ia、Ua、La、Ra、Ce分别为直流力矩电机的电流、电压、电枢回路电感、电阻和反电动势常数,θ·m为电机转速.柔索模型是利用SimMechanics工具箱中的Body、Body Spring&Damper等模块建立柔索实物模型:

人体在进行卧推时,主要是上肢及胸部的肌肉发挥作用.因此,在建立人体模型时将其简化为如图2所示的包括上肢、胸部及横杠在内的封闭六连杆机构.按照实际人体各部位的参数完成对杆件变量的设置[10].在卧推训练过程中,为了保证训练效果,预防训练伤害,卧推速度不能太快,同时避免急起急停.设定横杠在一个周期内(0~6 s)的速度变化规律函数为
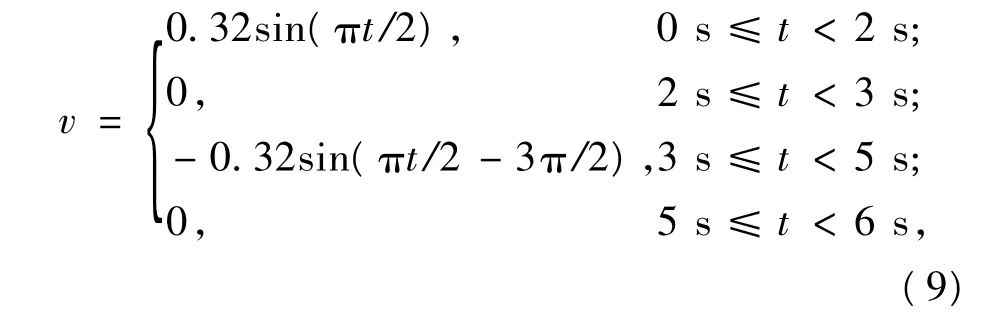
其运动轨迹变化曲线如图6所示.
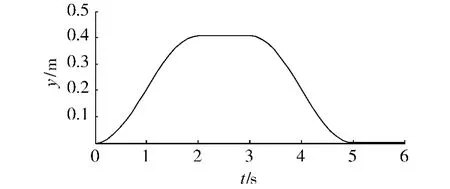
图6 卧推轨迹曲线Fig.6 Curve of bench press
4.2 仿真分析
为了验证牵引力规划器和控制器的有效性,检验控制系统的性能,对图5所示的人机系统模型进行仿真研究.模拟负载的质量设定为为60 kg,模拟的重力加速度值为10 m/s2.
利用SimMechanics工具箱中的传感器模块,检测柔索模型的运动状态,按照式(5)~(7)完成对动态负载力的计算.在一个周期内动态负载力变化曲线如图7所示.由图7可以看出,人体在卧推过程中,相对于恒定负载,人体所受的实际负载力波动是比较大的.因此,为了真实的模拟重力环境下的负载特性,实时优化负载力是很必要的.
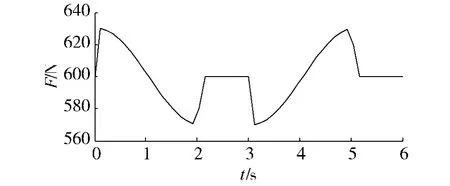
图7 动态负载力曲线Fig.7 Curve of dynamic load
按照式(4)所确定的柔索牵引力规划数学模型,在卧推训练过程中,给定的柔索牵引力变化曲线如图8中实线所示.
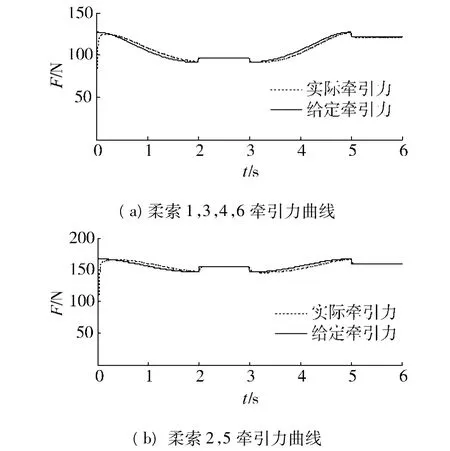
图8 各柔索牵引力曲线Fig.8 Curves of wire tension
将人机系统模型、柔索力控制器及牵引力规划模型进行联合仿真.仿真过程中,虚拟拉力传感器实际测到的柔索牵引力如图8中虚线所示.从图中可以看出,在卧推训练过程中,柔索实际的牵引力基本上能够跟随规划牵引力,这说明控制器是有效的,能够很好地跟随横杠位姿变化并完成运动过程中动态负载力的控制.观察可发现:在横杠上升阶段,柔索实际牵引力略大于规划牵引力;横杠下降阶段,柔索实际牵引力小于规划牵引力.这与实际情况是吻合的,因为宇航员训练机器人需要根据训练对象的姿态和运动状态把期望负载力施加到人体上,人做主动运动,而机器人处于被动运动状态.机器人在做被动运动的同时要实现动态负载力控制,是被动方式下的力控制.
图9所示为各个柔索的实际牵引力与规划的牵引力的误差曲线.从图9的误差曲线可以看出,在训练开始后,力控制器能很快响应,误差迅速变小.在正常工作过程中,无论柔索牵引力如何波动,都能将误差控制在5 N以内,这说明力控制器性能良好,响应速度快并且对力干扰有很强的鲁棒性.控制器满足系统力控制要求.

图9 柔索张力误差曲线Fig.9 Curves of wire tension deviation
5 结束语
针对太空失重的恶劣环境,为了实现宇航员的卧推训练,设计了一种柔索驱动的宇航员训练机器人.通过分析卧推的运动特性,设计了具有不完整约束特性的机器人构型,考虑人体上肢的约束作用,系统是一个具有完整约束特性的人机系统,这是对并联柔索机器人机构学理论和控制的大胆探索.针对所设计的机器人构型,给出了机器人的可控工作空间,并建立了牵引力规划数学模型.鉴于柔索及人体的刚度小,本文采用了基于位置内环的力外环控制策略.仿真研究表明:该控制策略能够有效地跟踪卧推过程中横杠的运动,并能够完成运动过程中动态负载力的控制.本文的研究为基于并联柔索机器人的宇航员训练机器人力控制系统的设计提供了理论依据,研究内容具有重要意义.本文初步设计了机器人的构型,在理论上研究了机器人的力控制策略,下一步研究将进一步优化机器人构型并通过实验验证控制策略的有效性.
[1]叶晓勤,季林红,谢雁鸣,等.康复训练机器人与传统中医康复方法相结合的探讨[J].中国康复医学杂志,2010,25(8):781-784.YE Xiaoqing,JI Linheng,XIE Yanming,et al.Discussion on combination of rehabilitation robot and rehabilitation methods of traditional Chinese medicine[J].Chinese Journal of Rehabilitation Medicine,2010,25(8):781-784.
[2]张立勋,刘攀,王克义.基于绳索牵引的航天员机能训练机器人虚拟重力控制[J].机器人,2010,32(4):454-458.ZHANG Lixun,LIU Pan,WANG Keyi.Virtual-gravity control of a wire-driven cosmonaut-enginery-training robot[J].Robot,2010,32(4):454-458.
[3]KIRK L,JAMES A.Reliability of strength testing using the advanced resistive exercise device and free weights[R].NASA,2008.
[4]付海峰.平板卧推动作肌肉工作特征的研究[D].北京:北京体育大学,2006:6-11.FU Haifeng.Research on characteristics of muscles during the flat bench press[D].Beijing:Beijing Sport Univesity,2006:6-11.
[5]张波,战红春,赵明扬,等.柔索驱动三自由度球面并联机构运动学与静力学研究[J].机器人,2003,25(3):198-200.ZHANG Bo,ZHAN Hongchun,ZHAO Mingyang,et a1.Kinematics and statics analysis of a 3-DOF sphere parallel wire driven mechanism[J].Robot,2003,25(3):198-200.
[6]郑亚青.绳牵引并联机构若干关键理论问题及其在风洞支撑系统中的应用研究[D].福建:华侨大学,2004:31-38.ZHENG Yaqing.Research on key theoretical issues of wiredriven parallel kinematic manipulators and the application to wind tunnel support systems[D].Fujian:Huaqiao Univesity,2004:31-38.
[7]李庆玲,叶腾茂,杜志江,等.外骨骼式上肢康复机器人力辅助控制[J].哈尔滨工程大学学报,2009,30(2):166-170.LI Qingling,YE Tengmao,DU Zhijiang,et al.Controlled assistance by an exoskeletal rehabilitation robot for upper limbs[J].Journal of Harbin Engineering University,2009,30(2):166-170.
[8]GOUTTEFARDE M,DANEY D,MERLET J P.Interval-analysis-based determination of the wrench feasible workspace of parallel cable-driven robots[J].IEEE Transactions on Robotics,2011,27(1):1-13.
[9]蒋再男,刘宏,黄剑斌,等.基于阻抗内环的新型力外环控制策略[J].航空学报,2009,30(8):1515-1520.JIANG Zainan,LIU Hong,HUANG Jianbin,et al.Novel explicit force control strategy based on impedance inner control[J].Journal of Astronautics,2009,30(8):1515-1520.
[10]张大威,李浩,石岫昆,等.计算中国男性人体体段转动惯量的多元回归方程的研究[J].医用生物力学,2005,20(2):85-87.ZHANG Dawei,LI Hao,SHI Xiukun,et al.Study on multiple regression equation for calculating segmental move inertia of segments of Chinese young male bodies[J].Journal of Medical Biomechanics,2005,20(2):85-87.
