矿车车载GPS上位机软件设计与开发
2011-06-23郭继毅管长焦邵明杰
郝 刚 郭继毅 管长焦 邵明杰
(1.煤炭科学研究总院沈阳研究院, 辽宁 抚顺 113122;2.三一重型装备有限公司,沈阳 110027 )
我国是矿山生产安全事故高发国家,矿石百万吨死亡率是美国、南非等矿业发达国家的30倍以上[1]。在露天矿中,运输事故是主要矿山事故,据安太堡露天煤矿和黑岱沟露天煤矿统计,每年矿车运输事故占采运事故的比例达70%以上。引发事故的部分原因是司机缺少足够的可视度和可供参考的实时图形图像信息,因此开发助驾系统可以降低与采矿设备操作有关的风险,减少采矿工业的伤亡率。
矿车助驾系统是全球卫星定位技术(GPS)、电子地图、无线通信综合在一起的高科技应用系统,是智能交通系统的重要组成部分。GPS的应用价值和市场需求正变得越来越大,成为众多公司和科研机构的研究对象。
本文设计的上位机软件将接收的GPS定位信号,解读出其中的时间、经纬度、海拔等定位信息并实时显示在界面上,同时将定位信息存入数据库,将接收数据结合匹配的电子地图在屏幕上显示,驾驶员便可浏览车辆附近矿区信息、选择安全的行驶路线。
1 GPS导航系统
GPS导航系统的结构主要是 GPS接收天线、GPS接收机、导航计算机、可视显示器以及位置检测装置等组成。其结构如图1所示[2]。
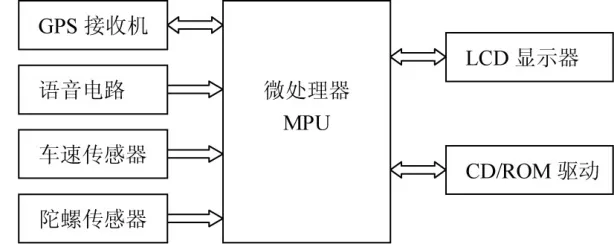
图1 矿车GPS导航系统结构图
系统根据不同的位置进行分类检测,绝对位置的检测采用GPS全球定位系统,相对位置的检测采用方向传感器,并利用车轮转速传感器测量车辆行驶距离。
由于 GPS卫星导航与自律导航所测到的矿车坐标位置数据及前进的方向与实际行驶的路线轨迹在电子地图上都存在一定误差。为修正这二者的误差,确保二者在电子地图上路线坐标相统一,需采用地图匹配(Map Matching)技术,这是一项确定车辆在带有街道名称和地址的地图上的定位技术,即在导航系统控制电路中要增加一个地图匹配电路,对矿车行驶路线与电子地图上道路的误差进行实时数字相关匹配,作出自动修正。它经过导航计算机(ECU)的整理程序进行实时快速处理,得到矿车在电子地图上指示出的正确位置路线。车载GPS的工作原理如图2所示[3]。
2 模块设计及实现
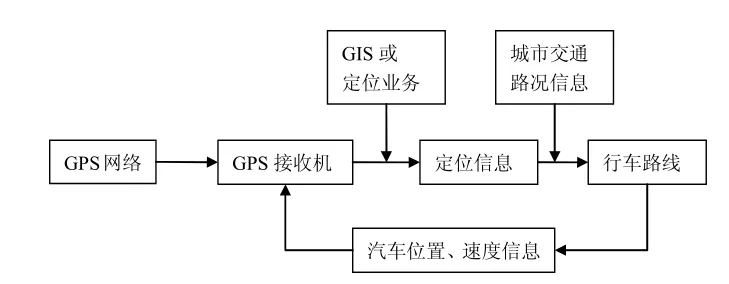
图2 车载GPS导航系统工作原理图
上位机软件的设计要求是能够接收GPS接收机发出来的数据帧,进行解码并将解码后的信息显示出来,能够根据需要在电子地图上实时显示车辆的当前位置,同时可以将GPS信息保存并根据需要进行查询。为了保证软件的通用性和可移植性,使用C++语言编写软件,并结合Access数据库。软件模块主要分为数据接收模块、数据处理模块、数据库模块、显示模块。系统主要功能模块如图3所示。

图3 系统功能模块
2.1 数据接收模块和数据处理模块
GPS数据接收模块负责接通过接口发送给个人计算机的数据,交由处理模块进行相应的处理。GPS数据处理模块把上传的信息保存在数组缓冲区中,并把其中以$GPGGA和$GPVTG开头的语句从全部信息中提取出来,通过以上对GPS报文格式的分析,以$GPGGA为开头的数据帧包含时间、经纬度、GPS状态、卫星数量、海拔高度的信息,以$GPVTG为开头的数据帧则包含了速度信息,这七项内容正是需要提取、转换、显示、存储的关键信息,这也正是数据处理模块的主要功能。GPS报文的一帧信息以$加报文头开始,以回车换行符结束,对一条信息的处理流程如图4所示。
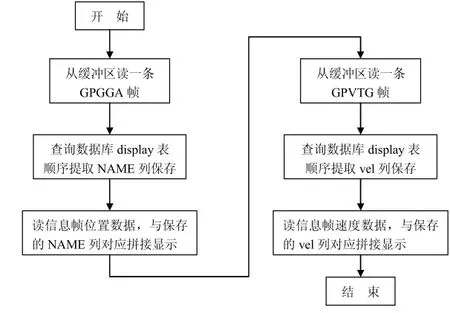
图4 一条信息的处理流程
数据处理模块将时间、纬度、经度、GPS状态、卫星数量、海拔和速度信息从接收到的数据中提取出来后,与display表中NAME、vel列的名称一一拼接在一起就构成一组完整的GPS信息显示在界面上。其显示结果如图5所示。
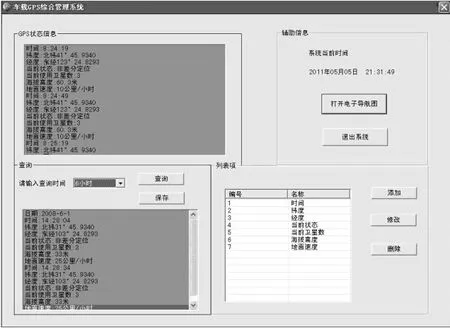
图5 系统主界面
2.2 数据库模块
综合管理系统在后台搭建Access数据库,主要包括两张表:display和 test,分别用来储存要显示的GPS条目的名称以及GPS每帧信息的详细内容。此外对表 display的操作还包括添加、修改以及删除,这样做的目是为了系统扩展的需要。
2.3 显示模块
一个完整的导航系统必须具有良好的人机接口,提供用户与导航设备的交互,显示模块就是将以上各部分的内容整合在一起,给用户提供一个简明舒适的人机界面,将信息反馈给用户,本文设计的GPS调试系统的界面如图5所示。
全球定位系统所提供的位置信息是矿车坐标系位置,对于矿区中的矿车可以结合谷歌地球(Google Earth)等电子地图,将GPS所提供的位置信息匹配在数字道路地图上,为矿车司机提供实时显示所驾驶车辆及附近车辆位置、矿区地质地形、运输道路、行驶安全路线、边坡、卸矿点、紧急撤退路线等信息。
3 结论
本文着重阐述了矿车助驾系统中车载GPS的上位机系统的开发,经过了系统方案的确定、模块的设计、软件的测试等过程,完成了系统的开发工作,达到了预期的要求。接下来将进行无线数据传输与电子地图匹配等研究。
[1]王启明,周爱民. 浅论矿山工程地质灾害控制[J].采矿技术, 2004, 4(4)∶ 20-23.
[2]孔庆华.现代交通电子控制技术[M].哈尔滨:东北林业大学出版社, 2004.3, 137-163.
[3]杨东凯. ITS系统分析与自动车辆定位[D]. 北京:北京航空航天大学博士学位论文, 2000.
