基于SVM数字波束形成的阵列天线结构对比
2011-06-14孙力娟邢光龙王彦霞
孙力娟,邢光龙,王彦霞
(燕山大学信息学院,河北秦皇岛066004)
0 引言
阵列天线由于在波束形成、波束控制和高增益等方面的优异性而成为最常用的天线之一。早期的天线方向图合成的目的主要是控制主瓣的宽度和旁瓣电平,但随着电磁环境污染的日益严重,仅靠降低旁瓣电平不能有效抑制强干扰。而智能天线采用一定阵元数的天线阵列,利用各个阵元的位置不同实现对空中无线信号进行空间采样。移动台发出的无线信号从某个方向到达天线阵列,这个方向可称为波达方向(Direction of Arrival,DOA),不同波达方向的信号通过天线阵列后就有不同的阵列响应,智能天线接收系统可以采取一定的算法(主要在基带实现)把不同波达方向的信号区分开来,从而降低干扰,增强系统性能。智能天线系统的性能主要取决于基带算法和阵列结构,所以在探索高效的基带算法的同时也很有必要设计合理的智能天线阵列结构[5]。在阵元数有限的情况下如何排列阵元进行高效的空间采样成为智能天线领域的一个关键问题,即阵列结构优化。
1 基于SVM的数字波束形成
这里考虑的是BPSK调制,经过天线阵列处理后,可得到期望用户信号的判决值+1或-1,即。考虑将波束形成过程看成一个将输入向量进行线性分类的问题。因此可以使用SVM的分类方法求天线阵列的权值 ω。
设天线阵列接收到的用户的参考信号为:

式中,xi为天线阵列接收到的第i个参考信号;di为用户发射的第i个参考信号的类别;l为参考信号的长度;M为天线阵元个数。SVM的目的就是要找出一个能将这两类数据分离的最佳超平面。
假设这两类参考信号是线性时,SVM问题的最终数学表达式为:


式中,α为拉格朗日因子;c为惩罚因子。
2 直线阵、圆形阵的最优结构参数
对于直线阵,设阵元间距为d,天线阵有M个阵元,假设阵元均为全向天线以第1根天线作为参考,则信号在第i个天线阵元上的相位延迟为k为载波传播常数,则天线阵对来自θ方向上的信号的响应矢量为:

对于圆天线阵,设阵元天线数为L,阵元也均为全向天线,阵元均匀分布在半径为R=的圆上,以最右面的1点为参考点信号在第i个天线阵元上的相_位延_迟为:

则天线阵对来自 θ方向上的信号的响应矢量为:

对于有k个用户的同步CDMA系统,它们的信号分别从不同的方向到达接收机。对于由全向阵元组成的直线阵,第m个阵元接收到的信号可以表示为:

对于由全向阵元组成的圆形阵,第m个阵元接收到的信号可以表示为:

式中,βi为第i个用户信号的信道响应向量;是加性高白噪声;为用户数据;Ei为用户信号能量;k为载波传播常数。直线阵和圆形阵结构如图1所示。

图1 直线阵和圆形阵结构示意图
假定此CDMA系统的反向链路具有良好的功率控制,即有用信号和所有干扰信号的功率都相等,在程序中设为1;信道的背景噪声为零均值的高斯白噪声,其功率为0.1,之所以选取这个数值,是为了使有用信号功率与背景噪声功率之比为10 dB。
对于直线阵的情形,假定有用信号从θ=0方向入射,干扰信号从θ=π/6和 θ=-π/6方向入射,阵元间距为d=,通过改变阵列结构参数ρ的值改变阵元间距,从而改变阵列结构,改变阵列方向图增益;对于圆天线阵的情形,有用信号来自θ=0方向,2个干扰信号的入射方向分别为 θ=π/3和 θ=-π/3方向。阵元均匀分布在半径为的圆周上,通过改变阵列结构参数ρ改变圆形阵列的半径,进而改变阵列方向图的增益。
随着ρ值的不同,阵列方向图的增益曲线如图2所示。从图2中可以看出,对于直线阵,当 ρ<1时,随着ρ值的减小,增益逐渐减小,事实上是由于方向图主瓣逐渐变宽的原因。另一方面,当ρ>1.2时,随着ρ值的增加,增益迅速下降,这是由于此时出现了许多较大的旁瓣,甚至出现和主瓣高度相同的旁瓣。同时,从图2中可以看出,ρ值取1.0~1.2之间比较合适。
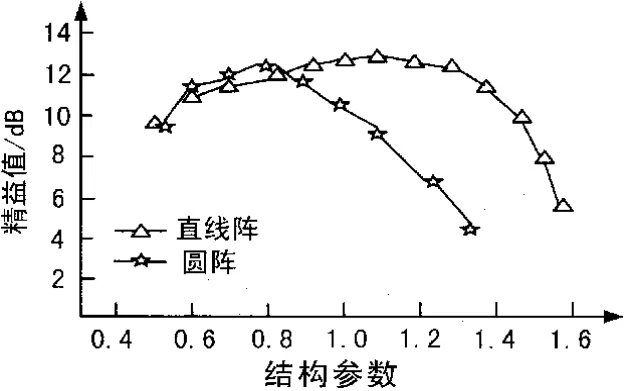
图2 ρ值与直线阵和圆阵增益的关系
对于圆阵,当ρ值比较小时,比较大的副瓣数目少;当 ρ值大于1.1时,出现了许多几乎与主瓣不相上下的副瓣,导致增益迅速降低。从图2中可以看出,ρ值在0.75~0.85之间比较合适。
3 直线阵和圆阵的性能对比
3.1 圆阵和直线阵在不过载情况下的性能分析
对于直线阵,天线阵列元素为8个,ρ值取1,这时每个阵元间隔为d=λ/2;对于圆阵,阵列元素也取8个,ρ值取π/4,这时圆环阵半径为2π。噪声采用加性高斯白噪声。假设只有一个期望的用户信号,并且不失一般性的,假设用户信号从0°入射。不过载情况下直线阵和圆阵阵列方向对比如图3所示。
试验一:仿真是在天线阵列不过载的情况下,且干扰信号与期望信号入射夹角比较小的情况下。假设干扰数为4,分别从 -30°,-15°,15°,30°入射 ,干扰强度为10 dB。
试验二:仿真是在天线阵列不过载的情况下,且干扰信号与期望信号入射夹角比较大的情况下。假设干扰数为 4,分别从 -100°,-50°,50°,100°入射 ,干扰强度为10 dB。
从仿真结果可以看出,在不过载的情况下直线阵和圆形阵都能准确接收期望信号,但当干扰信号和期望信号夹角较小及干扰信号之间夹角较小的情况下圆阵阵不能识别出所有的干扰信号,而直线阵可以准确识别干扰信号并对其零陷;而当干扰信号和期望信号夹角较大及干扰信号之间夹角较大的情况下圆形阵能准确识别出所有的干扰信号。
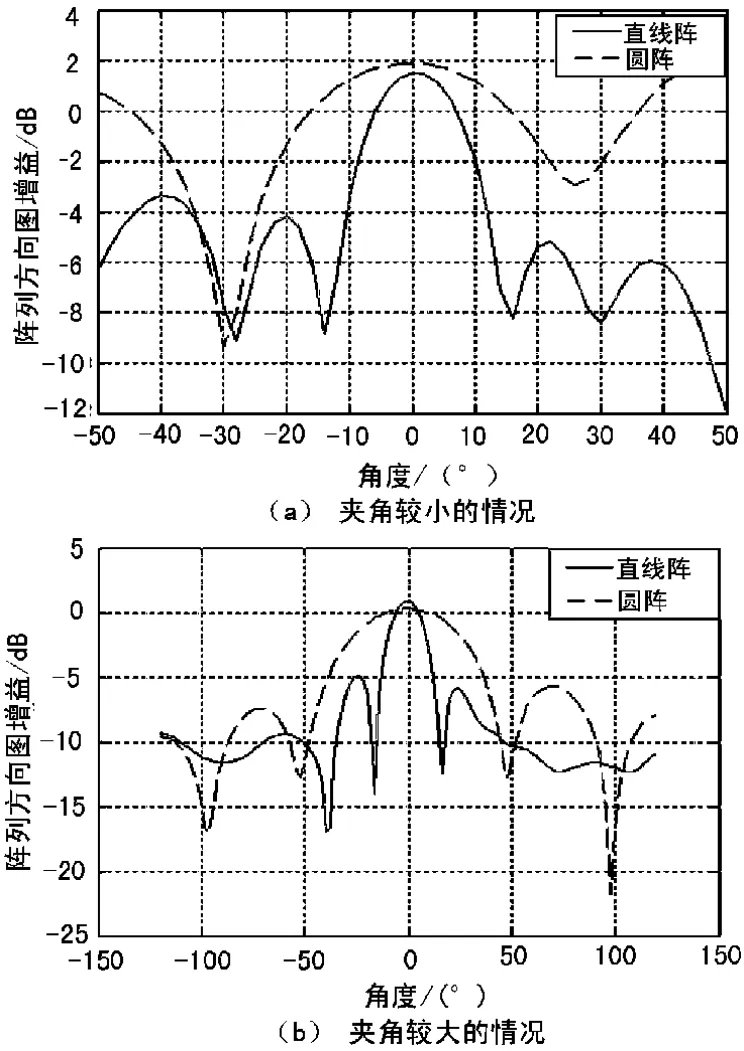
图3 不过载情况下直线阵和圆阵阵列方向对比
3.2 圆阵和直线阵在过载情况下的性能分析
对于直线阵,天线阵列元素为8个,ρ值取1,这时每个阵元间隔为d=λ/2;对于圆阵,阵列元素也取8个,ρ值取π/4,这时圆环阵半径为2π。噪声采用加性高斯白噪声。假设只有一个期望的用户信号,并且不是一般性的,假设用户信号从0°入射。过载情况下直线阵和圆形阵阵列方向对比如图4所示。
试验一:仿真是在天线阵列过载的情况下,且干扰信号与期望信号入射夹角比较小的情况下。假设干扰数为 8,分别从 -70°,-50°,-30°,-15°,15°,30°,50°,70°入射,干扰强度为 10 dB 。
试验二:仿真是在天线阵列过载的情况下,且干扰信号与期望信号入射夹角比较大的情况下。假设干扰数为 8,分别从 -170°,-130°,-90°,-50°,50°,90°,130°,170°入射,干扰强度为 10 dB。
从仿真结果可以看出,直线阵和圆形阵在过载的情况下也都能准确接收期望信号而不受阵列自由度的影响,同样当干扰信号和期望信号夹角较小及干扰信号之间夹角较小的情况下直线阵可以准确识别干扰信号并对其零陷;而当干扰信号和期望信号夹角较大及干扰信号之间夹角较大的情况下圆阵能准确识别出所有的干扰信号且旁瓣较少。

图4 过载情况下直线阵和圆形阵阵列方向对比
4 结束语
智能天线是当前通信领域的热门技术之一,常规的天线阵列有均匀直线阵列和均匀圆形阵列。从仿真结果可以看出,当干扰信号和期望信号夹角较小以及干扰信号之间夹角较小的情况下,与均匀圆形阵相比,直线阵列有着自身独特的优越性,这种阵列天线更适用于扇形小区;而当干扰信号和期望信号夹角较大以及干扰信号之间夹角较大的情况下,圆形阵列表现出了良好的性能。
从仿真结果也可以看出,直线形阵列的主波瓣比圆形阵列主波瓣的宽度窄很多,这样不但可以抑制和期望信号夹角过小的干扰,直线阵也更容易实现基站的定向覆盖,而且在基站的选址问题上也更加灵活。
[1]罗晓牧,周渊平,王国利.SVM自适应波束成形算法[J].电路与系统学报,2005,10(6):54-58.
[2]陈 荣,周 旭,张士强.扩频信号的捕获与跟踪[J].无线电工程,2010,40(5):26-29.
[3]李立峰.数字波束形成技术在智能天线中的应用[J].信信息处理,2009,39(3):16-21.
[4]马文华,王华芝,查明勇.CD MA系统中智能天线阵列形式的研究[J].北京邮电大学学报,2000,23(2):91-94.
[5]邓乃扬,田英杰.数据挖掘中的新方法-支持向量机[M].北京:科学出版社,2004:56-98.