船舶综合报警器的设计
2011-06-13胡佳文马鹤鸣俞红杰
胡佳文,马鹤鸣,俞红杰
(1.浙江海洋学院机电学院,浙江舟山 316004;2.宁波海运股份有限公司,浙江宁波 315020)
海上航行,安全至关重要。随着船舶自动化程度的不断提高,各种用于保障船舶航行中人身、设备安全的装置应运而生。现代海运船舶通常装备的报警设施有:通用警报装置、火灾报警器、水密门报警器、冷藏库报警器、起抛锚报警器、供水报警器、CO2施放预告报警器、无人值守报警器、船舶机舱监测报警系统等。大多数的报警装置或报警提示装置会安装在驾驶室内,而这些报警装置一般都使用类似的声光报警提示。由于报警装置众多,又分布在驾驶室内各个位置,因而在报警信号产生时,值班人员需要花费一定的时间查找报警源,从而延长了处理紧急情况的时间。
据调查了解,目前在航、在建的国内或国际航线的船舶根据自动化程度的高低装备了数量不等的报警设备,有的多达十几种报警信号源,其分布范围已大大超过值班人员的视觉范围,对于查找报警信号源极为不利,因此设计一种船舶综合报警器十分必要。而国内外市场上尚未见此独立、通用的船舶综合报警器产品,检索相关研究论文也无果。
笔者研究并设计了一个电子装置,可以在不改变或很少改动原有报警系统的条件下,把所有的报警信号综合到一起,当报警信号出现时,可以容易发现报警源,进而在第一时间采取相应措施应对紧急情况。
1 系统结构及工作原理
根据船舶规范要求,报警系统应满足:所有的报警应同时发出视觉和听觉报警信号;报警系统应能对同时发生的所有故障发出报警信号;报警设备可设有消除听觉报警信号(消声)的装置;如单个报警在机舱集控站(室)已有显示,则也应在其他相关的控制站显示报警信号,但可采用组合报警的方式显示;报警系统应具有自检功能,即对自身的故障自动进行检测和报警(或指示),以防止有警不报或误报警[1]。
现代船舶装备了各种类型的报警器或报警系统,可以满足不同的应用需求。笔者设计的综合报警器是这些报警系统基础之上的延伸。通常,船舶上的报警装置都有报警信号输出的接口,可以作为本系统的输入信号。少数没有输出接口的设备,只需稍加改造,在蜂鸣器处并联1个继电器作为输出信号即可。因此本系统的输入信号为开关量信号。笔者设计了16路独立输入接口,可以接入16种不同的报警设备,足以满足现代船舶应用的需要。
另外,考虑到报警信号要输入到VDR(船舶黑匣子),设计了与输入对应的16路输出接口。该接口也可应用于其他延伸报警。系统的结构框图如图1所示。
整个报警器系统由1个主控制器和2个信号接线板组成,系统主要电路都设计在主控制器内,信号接线板主要用于输入输出信号的接线。系统结构简洁、紧凑,由于船舶内空间有限,采用该结构可以节省空间,并且方便安装、调试。
主控制器内电路包含电源部分、16路开关量信号输入电路、16路开关量信号输出电路、16路LED指示灯、32位拨码开关、4只按钮和1只蜂鸣器。控制器原理如图2所示。
电源部分为整个报警器系统提供电能。由于船用设备可靠性要求很高,所以电源的设计也尤为重要。本系统采用交流、直流双电源输入,经过各自的电压变换电路后,通过二极管隔离后并联,互为备用,大大提高了电源的可靠性。现代船舶通常有两路以上的供电,一般主电源是220 V交流,由船用发电机提供,备用电源是24 V直流,由充放电板(蓄电池)提供。24 V直流可以直接接入报警器的直流输入端,220 V交流则通过变压器降压到24 V再接入报警器的交流输入端。在电源稳压电路调试的时候,适当将交流那一路稳压输出的电压调到稍高于直流输出的那一路,这样可使在有220 V主电源供给的正常航行状况下,报警器主要使用主电源,从而减少对24 V备用电源的消耗。
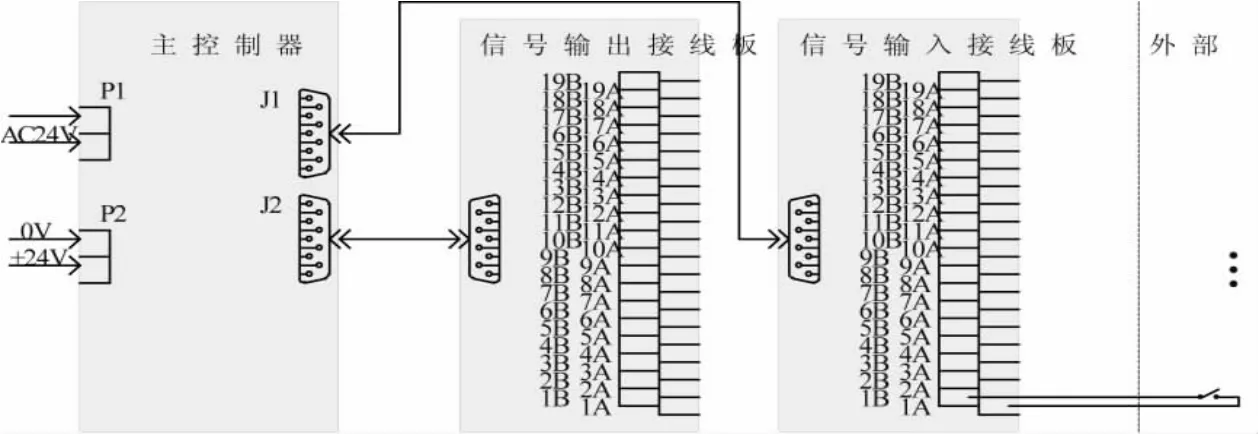
图1 船舶综合报警器结构框图Fig.1 Block diagram of integrated navigation alarmer
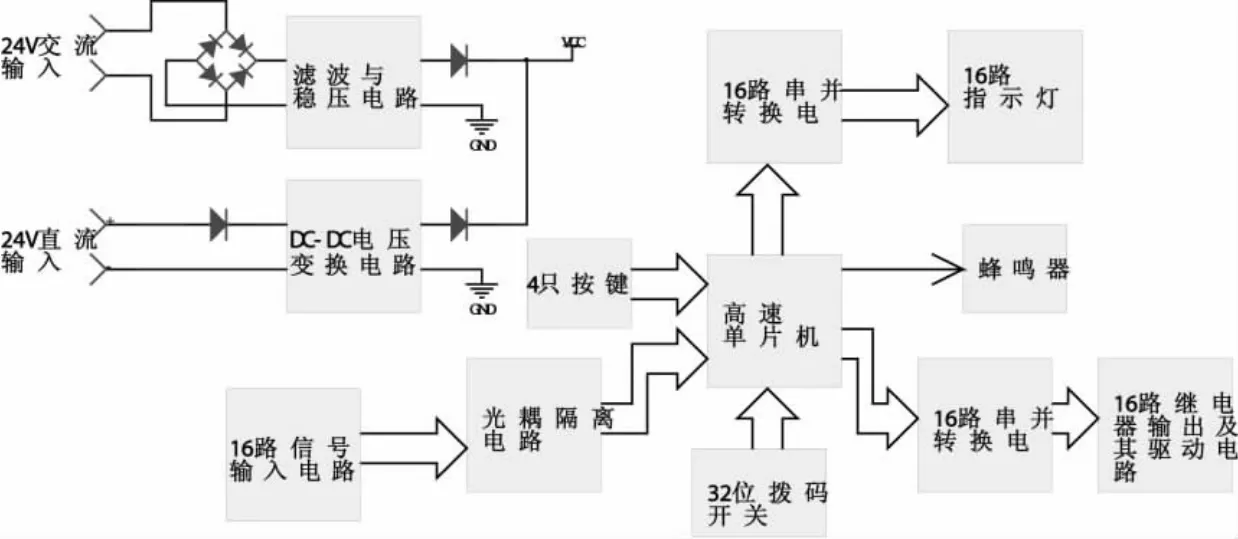
图2 船舶综合报警器主控制器原理框图Fig.2 Block diagram of main controller
16路开关量信号输入是报警器工作的依据。通常由其他船舶报警器提供的开关量报警信号都较为稳定、可靠,但考虑到信号传输导线比较长,而且船舶上机电设备众多,导线上串入的干扰信号也不可忽视,所以本系统设计了抗干扰的滤波电容,以及光电隔离措施以保障系统的稳定与可靠。
16路继电器输出的设计可应用于将报警信号传送至VDR,实时记录船舶航行过程中各种设备的报警情况,在出现意外进行事故分析或责任认定的时候可以提取数据。此外,也可将输出信号延伸至全船报警,以便在出现报警而无人值班室,能鸣响全船高音喇叭,提醒船员处理。
在综合报警器主控器面板上,安装16路组合式LED指示灯,用于指示每一路的报警情况。LED指示灯具有功耗小、寿命长、颜色鲜艳、光线柔和的特点[2]。本报警器采用的组合式LED指示灯不但结构紧凑,而且透明的灯帽内可以由用户贴入标签,使得报警情况一目了然,非常直观和实用。
由于船用报警设备生产厂家众多,品牌型号各不相同,输出信号触点类型有常开,也有常闭。本报警器设计了32位拨码开关,可以对每一路的输入信号单独进行设置,可以设为常开或常闭报警。另外也可以对输出触点信号进行设置,设为常开有效或常闭有效。
报警器设计了4个按钮,设置功能为试验、消音、复位与调光。根据船舶规范的要求,报警设备应当有试验功能,以测试报警设备自身是否有故障,防止误报警或不报警。在报警产生后,可以有消除声响的装置,但要保留报警指示。在故障排除后,报警信号应当自动或人工消除。另外,在驾驶室的发光设备,必须具备调光功能,以免因光线太强而影响船员夜间驾驶。
蜂鸣器用于在报警产生时进行声音提醒。可以用消音按钮消除某一通道本次产生的报警声音,但不影响其他通道或本通道下一次声音的产生。
2 主要硬件电路设计
(1)开关量信号输入电路:输入电路采用了光电隔离技术,当外接的其他报警设备的无源触点闭合后,电流经R35流过LED再通过光耦,这样光耦的输出端就可以输出一个被单片机检测到的信号,从而完成开关量信号的采集。二极管D7为反电压提供通路,保护了光耦。电容C36可以过滤高频干扰信号。开关量信号输入电路如图3所示。
(2)开关量输出电路:输出电路的设计也采用了光耦隔离技术,单片机输出的信号经光耦输出,并设计了LED指示输出状态,三极管放大后驱动继电器。设计中将继电器的常开、常闭触点都引出,方便不同的应用需要,如图4所示。
(3)主控单片机电路:主控单片机选用的是Atmel公司的AVR系列单片机。AVR单片机是Atmel公司于1997年研发推出的,采用了精简指令集RISC(Reduced Instruction Set CPU)结构的单片机。AVR单片机运用Harvard结构,在前一条指令执行的时候就取出现行的指令,然后以单周期执行指令,所以在相同的时钟频率条件下,具有更高运行速度。ATmega系列属于AVR单片机中的中高档产品,它承袭了AT90系列所有的优点,并在此基础上增加了更多接口功能,而且在省电性能、稳定性、抗干扰性以及灵活性等方面设计得更加周全和完善[3]。
ATmega16单片机有丰富的接口可以满足报警器众多外围设备连接的需求,内置的定时器具有PWM波产生的功能,可以用于LED指示灯的调光。在设计中,单片机采用了8 MHz的时钟频率,利用JETAG接口对单片机进行程序下载和仿真调试。主控单片机电路如图5所示。

图3 开关量信号输入电路原理图Fig.3 Digital signal input schematic
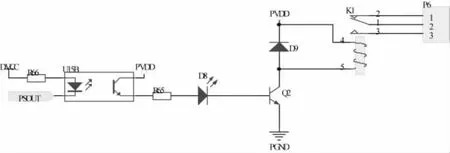
图4 开关量输出电路原理图Fig.4 Digital signal output schematic
3 软件设计
报警器的软件设计采用C语言编写程序。C语言有结构化、能产生高效代码等优势,可以大幅度加快开发进度,特别是开发一些复杂的应用系统[4]。
报警器的主程序流程如图6所示。系统上电复位,开始运行程序,首先进行初始化和系统自检等工作,初始化及自检完成后,主程序对系统自身状况进行判断,若有故障,则退出程序,并驱动蜂鸣器、闪亮LED指示灯报警;若初始化及自检正常,则继续进入主程序运行。主程序报警工作的过程首先是通过扫描16路输入端口读入开关量信号,然后扫描32位拨码开关读入设置信号,对两种信号进行逻辑运算和关系判断,得出报警与否的结论,然后驱动对应的16路继电器输出报警或不报警的信号,同时闪烁或点亮或不点亮对应的16路LED指示灯,并根据是否有报警产生驱动蜂鸣器发声或不发声。然后进行4路按键扫描,若检测到有按键按下,则执行相应的按键功能程序,例如试验按键被按下时就执行系统自检,并点亮所有的LED指示灯及鸣响蜂鸣器;消音按键被按下则停止蜂鸣器发声,并将闪烁报警的LED指示灯改为平光显示;复位按键被按下时则根据报警信号是否消除有选择地将对应通道的报警信号撤销;调光按键每被按下一次,则将LED指示灯的亮度提高一级,总共分8级,达到最大亮度,再按则恢复到最低亮度。
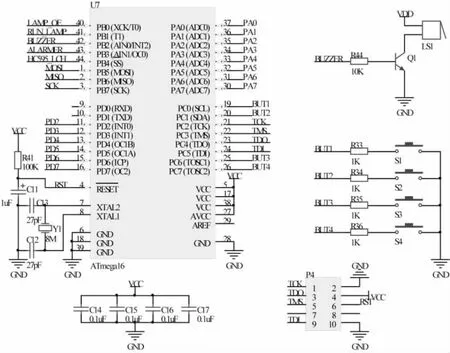
图5 主控单片机电路原理图Fig.5 Main microcontroller schematic
4 小结
本文所设计的船舶综合报警器,满足船级社和国际海事组织对船舶报警设备的要求。由于采用了高性能的AVR单片机,报警反应迅速、性能稳定可靠。创新性的交流、直流双电源输入设计,极大程度地保障了该报警器在多种突发情况仍能保持稳定不间断地工作。采用组合式LED指示灯的设计,使得该报警器通用性较好,可以适应各种的船舶的综合报警需求,并且用户可以自定义指示灯标签,可以更适合用户直观地了解报警情况。
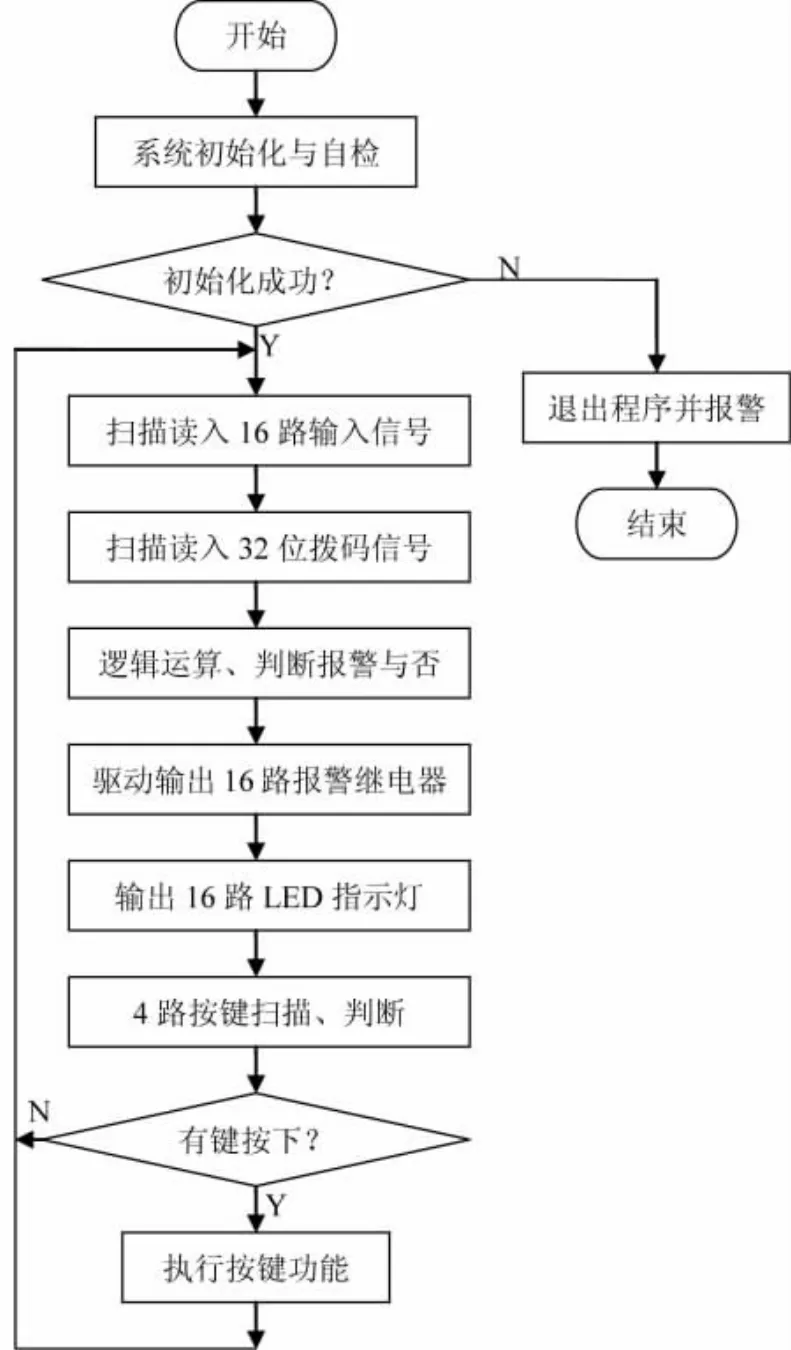
图6 主程序流程图Fig.6 Main program flowchart
[1]中国船级社.钢质海船入级规范[S].北京:人民交通出版社,2006.
[2]秉 时,杜 浩.LED指示灯的应用趋势[J].红外,1999(12):51-51
[3]马 潮,詹卫前,耿德根.ATmega8原理及应用手册[M].北京:清华大学出版社,2003.
[4]沈 文,LEE E,詹卫前.AVR单片机C语言开发入门指导[M].北京:清华大学出版社,2003.
