二维微动精密工作台
2011-06-13黄瑜瑜
黄瑜瑜
四川大学制造科学与工程学院,四川成都 610065
二维微动精密工作台
黄瑜瑜
四川大学制造科学与工程学院,四川成都 610065
二维微动精密工作台是一种高精度的测量系统,用于扫描测量被测件表面的微观形貌,在扫描测量工作中要求达到微米级的运动精度,为此建立了X-Z方向的精密运动平台,在二维测量方向上分别达到相应的测量精度要求,并对静压气浮导轨、精密滚动丝杆、滚动摩擦导轨控制等关键技术进行了研究。静压气浮导轨采用了有限元法的设计,使其具有较高的承载能力和刚度。该装置采用模糊PID控制技术,改善了非线性因素的影响,从而获得较高的稳态位置精度。
.二维微动精密工作台;静压气浮导轨;模糊PID控制技术
0 引言
精密测量是现代高新科学领域最为关键和共性的基础技术之一,在尖端工业生产和科学研究中占有极其重要的地位,具有广阔的应用前景。随着技术的发展,对精密微动平台的运动精度要求也越来越高。对于高精度微小尺寸的二维测量,可以通过X、Z两个方向运动的合成,实现对其平面微观形貌的测量。本设计采用闭式矩形静压气浮导轨,具有摩擦小、寿命长、速度高、精密度高、无污染等优点。采用有限元设计方法设计气浮导轨,使运动平台具有较高的承载能力和刚度;对传统的PID控制技术进行改进,采用模糊PID控制技术,使运动平台具有较高的定位精度。Z向由于运动部件的重力与运动方向相同,会影响气浮导轨的驱动性能,所以采用加配重方法平衡气浮导轨产生的重力。
1 总体方案设计
1.1 测量原理
X-Z二维精密微动工作台主要是把旋转运动变为直线运动,以传递运动为主,要求结构紧凑,有较高的传动精度。因为切削力不大,同时出于对传动刚度的考虑,所以确定对X方向采用步进电机装置配合精密滚动丝杆和滚动摩擦导轨设计,使得X方向具有定位精度较高等特点; Z方向使用 “无摩擦运动”的气浮导轨外加光栅尺、配重实现位移,可实现微小位移的运动,且具有定位精度高、摩擦小和运动平稳等优点。X-Z二维精密工作台是高精度运动平台的发展方向,它们的移动相互独立,互不影响。
1.2 测量方法的设计
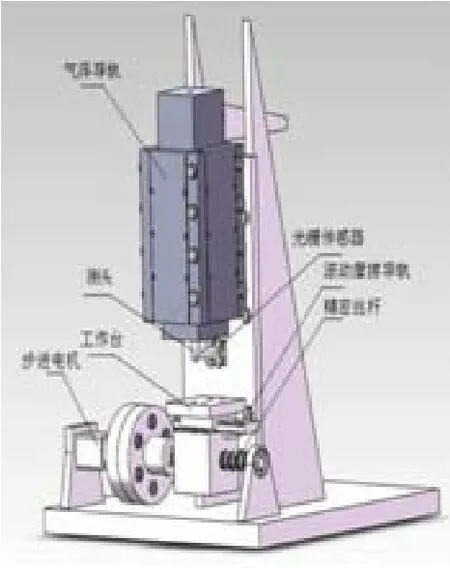
图1
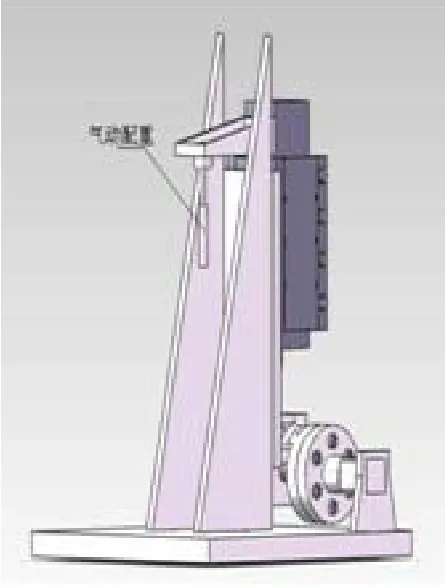
图2
图1、图2为二维精密微动工作台的机械结构。测量开始时,被测工件置于工作台上并将其固定。步进电机通过联轴器带动精密滚动丝杆转动,滚动摩擦导轨与精密滚动丝杆相连接,将旋转运动转换成直线运动,与滚动摩擦导轨固连的工作台随之做直线运动,实现了X方向的移动。Z轴方向由于自身的重力与运动方向相同,故通过加配重来减轻自身的重量。由于气浮导轨开始运动后,是由气浮导轨中间隙间的气膜产生运动,其摩擦力很小,对气浮导轨的上下运动几乎没有影响。测头在物体表面上探测其形貌而上下移动,从而带动气浮导轨运动,其上的光栅传感器连接数显表,由数显表将其运动数值反映给操作者。
重物配重虽然运动平稳,但是会增加摩擦力,易产生爬行现象。因此,选用气动配重,可以驱使电机负载为零,提高运动的定位精度和速度的平稳性,从而提高了平台的运动精度。
2 平台气浮导轨设计
2.1 静压气浮导轨
气浮导轨也称为空气静压导轨,是由导轨和滑块组成的滑动副,导轨间有一层很薄的气膜作为工作介质,利用外部的压缩气体充分干燥并过滤后通过一些开在导轨表面上的节流器导入空气使导轨和滑块间充满压缩空气,并借助形成的压力气膜来支承负载并实现平稳工作,气浮导轨具有运动精度高、摩擦阻力小、磨损率近乎为零、噪声低、振动小、运动平稳无爬行现象、高刚度等优点,可以使定位工作台及滑板获得较高的运动精度。而且气体导轨的使用寿命长,维护也比较容易。因此,在精密测量仪器中的应用越来越广泛。
2.2 气浮导轨的有限元设计
有限元设计法是首先将其划分为有规律的若干矩形网格,利用雷诺方程来求解。假设间隙气体的流动是等温的,则可用雷诺化简方程表示:
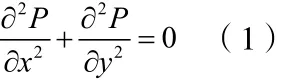
由于周围都是空气环境,所以其边界条件是:

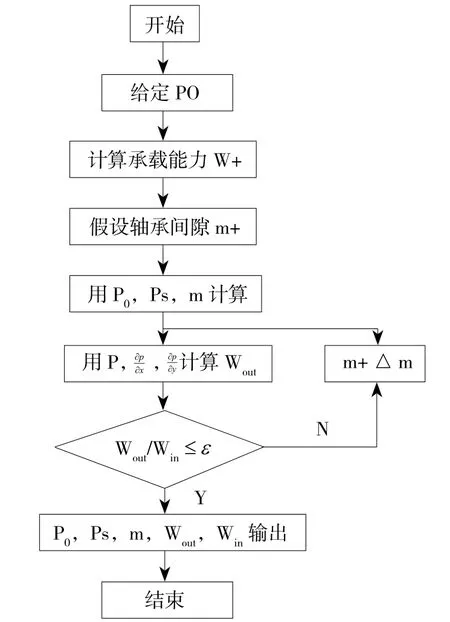
其中,Pa为环境的气体压力。在(2)的条件下求解(1)式,便可求出气体的压力场分布。再根据下图3所示步骤便可求出气浮导轨的输入输出气体量。左图3中P0为节流孔出口压力;Ps为供气压力;W为承载能力;m为气膜厚度;Win为流入的气体量;Wout为流出的气体量;ε为精度阈值。
3 控制方式
微动小量程工作台,定位精度要求很高,需要很强的抗干扰能力,传统的PID控制技术很难达到满意的效果,由于存在旋转运动与直线运动的转换,会引入非线性误差,为了更好的消除非线性误差,可以采用模糊PID控制。它具有很强的鲁棒性,可以消除非线性误差。
如图4所示是一个基于离散论域的模糊PID。
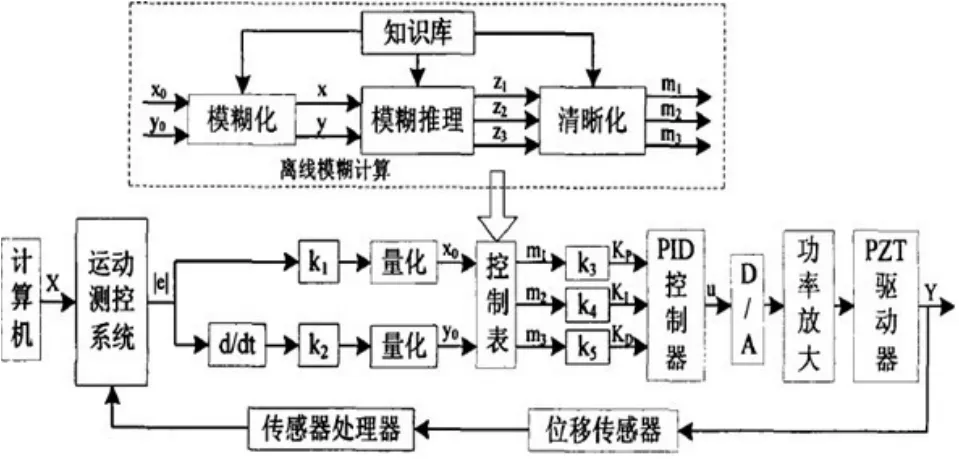
图4 控制器的系统结构图
其中 ,k1、k2、k3、k4、k5为尺度变换的比例因子;m1、m2和m3为查表所得的值;Kp为比例系数;Ki为积分作用系数;Kd为微分作用系数。
建立控制规则:定义系统偏差绝对值|e(x)|、偏差变化率绝对值 |△ e(k)|。
1)当|e(x)|较大时,即为加快系统的响应速度,应取较大的Kp和较小的Kd,并且去掉积分作用;
2)当|e(x)|和|△e(k)|为中等大小时,应取较小的Ki值,Kp和Kd值大小适中,以保证系统的响应速度;
3)当|e(x)|较小时,应增大Kp和Ki值,使系统具有良好的稳态性能,同时应适当的选取Kd值,其原则是:当|△e(k)|较小时,Kd值可取大些,通常取为中等大小;当|△e(k)|较大时,Kd应取小些。
4 结论
1)新型X-Z二维精密微动工作台采用气动配重,运动精度增加;2)气浮导轨采用有限元设计法,不必考虑扩散效应,承载能力可根据大气压的增大而增大,而且简便、可靠、易行;3)与传统的PID控制技术相比,采用模糊PID控制技术提高了测量精度;4)设计的X-Z二维精密微动工作台具有微米级的定位精度,适合于作为高精度的小尺寸测量仪的运动平台。
[1]孙麟治,李鸣鸣,程维明.精密定位技术研究[J].光学精密工程,2005,11(13):69-75.
[2]刘向阳,郁鼎文,冯平法.竖直运动平台气动配重的研究[J].机械科学与技术,2006,25(3):352-354.
[3]陶家生.闭式双排节流孔矩形气浮导轨的计算方法[J].光学精密工程,1997,2(1):55-61.
[4]马明建,辛世界,王辉林,等.静压式平面空气轴承压力场得有限元分析[J].农业机械学报,1994,12(4):91-97.
[5]吕春兰,王立国,孟亚男,姜德龙.基于模糊自整定PID参数控制器的设计[J].吉林化工学院学报,2002,19(2):33-34.
[6]桑武斌.二维超精工件台及其控制系统的研究[D].杭州:浙江大学研究生院,2008:46-52.
[7]徐灏.机械设计手册(3)[M].北京:机械工业出版社,2003.
[8]浦昭邦,王宝光.测控仪器设计[M].北京:机械工业出版社,2010.
TH122-62..
A
.1674-6708(2011)52-0078-02
