一种新的高动态军事航空自组网路由协议
2011-06-07张岳彤
段 荣,吕 娜,张岳彤
(空军工程大学电讯工程学院,陕西 西安 710077)
1 军事航空自组网简介
移动自组织网[1]具有无中心、自组织和多跳路由等特点,具有很强的灵活性和抗毁性,并能减少通信盲区,被广泛用于战场通信、抢险救灾、野外科考等领域。近年来,国内外已经开始研究把移动自组织网应用在航空通信领域。目前的研究成果主要集中于民航和无人机自组织网络方面[2-6],还没有关于在军用飞机节点之间建立自组织网络的相关研究成果。因此,在军事航空通信中引入自组织网的概念,必将大大提高军事航空通信的抗毁能力以及远程作战保障能力,可见,军事航空自组网(Military Aeronautical Ad hoc Network,MAANET)的研究具有重要的理论研究和实际应用价值[7]。
MAANET的概念图如图1所示。MAANET采用动态组网、动态路由和中继等技术,将作战飞机彼此互联互通构成一个多跳网络,同时具备快速高效组网的优势和自组织、自修复的能力。当目的节点在本节点的通信范围内时,直接发送数据分组,当目的节点不在本节点通信范围内时,选择合适的路由,通过其他节点转发分组。在没有空中平台的信息支援情况下,作战飞机之间可以彼此交换战场态势信息、指挥控制信息和协同作战信息,从而实现编队内或编队间协同作战。在有空中中继平台(高空无人机或预警机)信息支援的情况下,MAANET网络还可以通过中继平台接入地面或卫星网络,与地面和卫星网络互联互通,从而构成整个空天地一体化网络的末端子网,有效提升超视距远程作战能力。地面指挥所的指挥引导信息、空域态势信息等可以向空中作战飞机传送,同时指挥所也可以接收作战飞机所发送的战场态势信息,对整个战场态势、打击效果等进行效能评估。
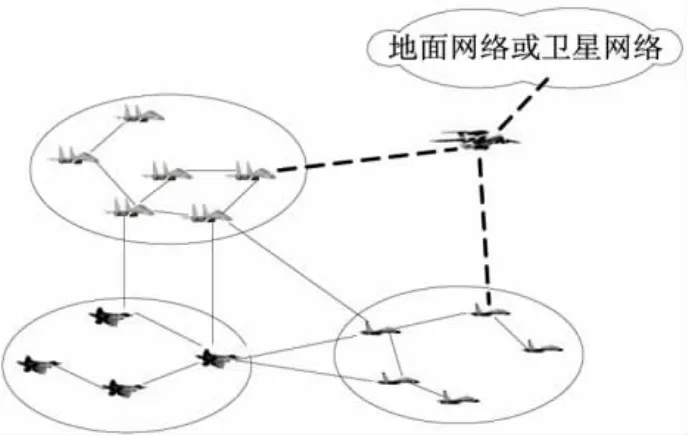
图1 MAANET的概念图
然而,在军事航空网络环境下,节点的移动速度将达到超音速,甚至高达多个马赫(1倍音速=1马赫≈340 m/s),这种由于节点高速运动而导致的网络拓扑结构的高动态性对路由协议的设计提出了巨大的挑战,传统的Ad hoc网络路由协议将不再适用;利用地理位置信息的路由协议是一种新的Ad hoc网络路由协议,网络中各个节点只需要知道其通信半径范围内邻节点的地理位置信息,路由建立仅需通过数个单跳拓扑信息就可以完成,但是目前已有的利用地理位置信息的路由协议一般都没有考虑节点的高速运动,因此也不能达到很好的路由性能,不能适用,需要设计特定的路由协议以适应MAANET网络的高动态环境。本文提出了一种基于地理位置的HDMARP,并对协议的性能进行了仿真分析,分析结果表明,该路由协议相对于其他已有的Ad hoc网络路由协议分别在平均时延、报文交付率以及路由开销等方面具有更好的协议性能,能够较好地满足军事航空自组网的高动态需求。
2 利用地理位置信息的路由协议研究现状
随着定位技术的发展,节点可以方便地获得自己的地理位置信息。利用这些位置信息可以改善自组网的路由性能,所以人们开始致力于研究使用位置信息的路由协议。基于地理位置的路由协议,网络中各个节点只需要知道其通信半径内的邻节点的地理位置信息,路由建立仅通过数个单跳拓扑信息即可完成。
在Ad hoc网络中,对于某一源节点或中间节点,通常会有多个邻节点距离目的节点更近。选择数据分组下一跳所基于的度量准则不同,得到的算法也不同。数据分组的贪婪转发策略主要有三种:MFR(Most Forward within Radius),NFP(Nearest with Forward Progress)和 CR(Compass Routing)[1],前两种转发策略是从距离的角度来考虑的,最后一个是从角度来考虑的。MFR转发机制通过选择距离目的节点最近的节点作为下一跳,使得到达目的节点的跳数最少。如果信号能量足够大,节点一跳传输范围的半径将很大。半径越大,节点间的相互干扰就越大。针对这一问题,提出了另外一种机制—NFP。在该机制下节点选择距离自己最近的邻节点作为下一跳,降低了节点间相互干扰的可能性,但同时也增加了路由的跳数。CR机制选择与源节点和目的节点连线距离最近即夹角最小的邻节点作为转发节点,旨在缩小数据分组传送的范围。利用地理位置信息的路由协议种类很多,下面介绍几种典型的地理位置路由协议[1],并分析了高动态移动自组织网路由协议的相关研究现状。
1)LAR路由协议
在LAR协议中,地理位置信息使用在路由发现阶段。LAR定义了期望域(Expected Zone)和寻找域(Request Zone)两个概念,期望域是指源节点S根据t0时刻目的节点D的位置和平均移动速度,估计在t1时刻D可能出现的区域;寻找域是指为减小路由开销,节点S为RREQ限定的一个路由请求范围。不在寻找域中的节点不转发RREQ。LAR算法实现的前提是中间节点能够判断自己是否位于某个特定的寻找域,为此,协议提出了两种设计寻找域的机制。LAR协议通过将新路径的寻找限制在自组网中较小的寻找域内,从而极大地减少了路由控制分组的数量。因此,它是对基于洪泛的路由协议的改进。
2)DREAM路由协议
DREAM是一种典型的定向泛洪式协议。在此协议中节点不需要保存路由表。源节点和每个中间节点分别计算自己到目的节点的方向,基于D的移动信息,可以确定一个夹角范围,称为转发域。中间节点将数据分组转发给该转发域内的所有一跳邻节点,直到数据分组成功递交给目的节点。
3)GPSR路由协议
在Ad hoc网络中,GPSR是一种健壮的地理路由协议,协议充分利用地理信息以实现无状态路由,节点有数据分组要发送或转发时,直接根据自身知道的位置信息进行转发。GPSR采用了两种转发方式:贪婪转发和周边转发。当一个节点以贪婪算法转发一个包时,它有比自己更接近终点的邻居节点,这个节点就选择距离终点最近的邻居节点来转发该包。当没有这种邻居节点时,数据包进入周边转发。GPSR中当有较多的分组传递给同一个目的节点时,其周边转发模式产生的过多跳数的路由会成为一个突出问题。
4)高动态移动自组网路由协议
现阶段研究的移动自组网主要是地面移动自组网。受地面条件所限,节点运动速度一般较慢,且通信距离较短。军事航空自组网中节点的运动速度很高,如高速战机的速度可高达多个马赫,并且通信距离一般很远。目前,国内外对于高动态移动自组网路由协议的研究较少。Justin P.Rohrer等针对当前高速飞行的航空节点以及特殊的航空环境,提出了一种高动态、跨层次的航空自组网架构[5-6]。R.L.Lidowski等人在25 m/s的速度下仿真了其提出的利用地理位置信息的无人机网络路由协议[8]。朱晓芳、华蓓等人针对一类高动态移动自组网提出了一种分簇的地理位置路由协议TOPOS[9],其仿真中的最高速度也仅仅设置在80 m/s。目前,仅有少许的一些特殊路由协议适用于航空环境,ARPAM[10]是欧盟的ATENAA为解决航空电信网的弊端提出的一种用于民航的基于地理位置信息的混合AODV路由协议;MUDOR[11]通过同时考虑节点间的相对速度和多普勒频移来检测链路质量;Spray路由协议[12]通过在一个可控宽度区域和一定数量邻节点范围内进行多播,最高速度可达到250 m/s。然而,在网络拓扑高速变化情况下,节点的高速运动使得全局链路状态及节点位置不断改变,频繁触发路由更新或位置更新过程,不仅在网络中产生大量的控制开销,而且路由收敛困难,数据转发延迟增大,丢包严重。以上所提及的路由协议中涉及的节点速度均远远低于超音速,这无疑成为亟待解决的难点问题。
3 基于地理位置的HDMARP
3.1 HDMARP协议的主要思想与关键技术
HDMARP协议不需要维护路由表,是一种无状态的路由协议。节点通过机载GPS接收机或者其他定位装置获取自己地理位置信息。当节点要发送一个数据分组时,通过一种基于速度的启发式算法获得每一跳最优邻节点,最终发送至目的节点。HDMARP算法包括邻居发现和分组转发两个过程:
1)邻居发现
邻居发现即获取邻节点的地理位置信息。根据网络中节点获取邻节点的地理位置信息的方式,HDMARP给定了信标发送模式(BEACONING)和捎带模式(PIGGY)两种工作模式。
信标发送模式(BEACONING)规定每个节点利用MAC广播地址,周期性地向其通信半径内的邻节点发送HDMARP hello分组的信标(beacon)信号,该hello分组信号中包含了节点的身份标识ID(如IP地址)和当前的地理位置信息(包括节点准确的地理位置和速度)。邻居发现是通过周期性接收邻节点发送的hello分组信标信号,不断更新维护一张用于计算邻节点TTI的邻居列表实现的。对于某一节点而言,它可能存在多个邻节点,这些节点之间发送的信标信号有可能发生数据冲突,为避免这一问题,HDMARP采用一种随机选取信标发射间隔的策略,有效降低多个邻节点发送信标信号的冲突概率。
捎带模式(PIGGY)在发送的数据分组中携带相关地理位置信息,所有在发送节点传输范围以内的节点都能侦听到该数据分组并从中提取出位置信息,将此位置信息存储到邻居列表,大大减少了协议的控制开销,提高了协议的性能。
2)基于相对速度的分组转发策略
拦截时间(time to intercept,TTI)是HDMARP中计算下一跳最优邻节点最基本的度量准则,是指候选邻节点从当前位置移动至处于目的节点传输范围以内所需的时间。由于定义的TTI类似于导弹拦截中从导弹向目标方向飞行至进入最后拦截线的拦截时间窗口的概念,目的节点的传输范围区域界线对应导弹的最后拦截线,所以将TTI称为拦截时间。源节点通过计算其所有邻居节点的TTI值,获知邻节点移动至目的节点传输范围内所需要的时间,选择在最快的时间内进入目的节点传输范围内的邻节点,即选择具有最小的TTI值的邻节点转发数据分组,此邻居节点被称为下一跳最优邻节点。
相对速度sd定义为候选邻节点相对于目的节点的移动速度。若sd的值较大且为正,表示邻节点正在以较高的速度向目的节点方向移动;相反,若sd的值较大且为负,表示邻节点正以较高的速度向远离目的节点方向移动。sd和TTI的计算步骤为:
1)相对速度sd
假设某一邻节点ni,其地理位置坐标为(xi,yi),节点在x,y轴方向上的速度分量分别为(vxi,vyi),则节点ni的速度矢量计算公式为

x轴正方向与飞机节点ni的速度矢量方向连线的夹角为

式中:atan2(y,x)计算给定的x及y坐标值的反正切值,结果以弧度表示并介于-π~+π之间。假设目的节点D的地理位置坐标为(xd,yd),则x轴正方向与飞机节点ni和目的节点D之间连线的夹角为

于是,上述两个夹角之差φ-φ-即为节点ni速度矢量vi与节点ni和目的节点D之间连线的夹角大小。从而得到相对速度为

图2为一个候选邻节点朝目的节点方向移动示意图。示例中,vxi为 -17.68 m/s,vyi为 -17.68 m/s,φ 为 -135.07°,为 -111.86°,由式(4)计算得 sd=22.98 m/s。
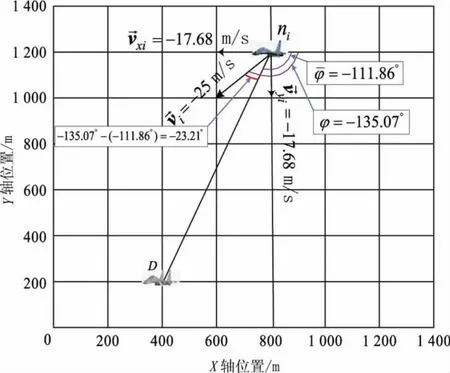
图2 候选邻节点朝目的节点方向移动示意图
2)拦截时间TTI
TTI是HDMARP协议贪婪转发策略中最基本的判断准则。源节点通过计算其所有邻居节点的TTI值,选择具有最小的TTI值的邻节点转发分组。可能成为最优邻节点的邻节点称为候选邻节点,给定候选邻节点ni,地理位置坐标记为(xi,yi,zi),目的节点D,其地理位置坐标记为(xd,yd,zd),R为节点传播半径,则ni与D的欧氏距离为

考虑两种特殊情形:
(1)TTI=0。由式(6)可以看出,Sd<0,相对速度为负,即节点向与目的节点方向相反的方向移动,并且节点ni与目的节点D的欧氏距离大于R,即节点ni不在目的节点的传输范围内,所以TTI=0时选择该邻居节点作为下一跳最优邻节点的概率为0。
(2)TTI<0。由式(6)可以看出,此邻节点在目的节点的传输范围以内,并且正向目的节点方向移动,规定在目的节点传输范围内的邻节点相对于不在传输范围内的邻节点将被优先考虑,所以TTI<0时节点将被优先选择作为下一跳最优邻节点。
3)本地最小问题的处理。本地最小问题是指当节点接收到一个数据分组时,节点自身具有最小的TTI,但其却不在目的节点的传输范围内的特殊情形。此时,数据分组将被存放在一个大小可配置的队列中,其存储时间也是动态可配置的。以一个可配置的频率不断检测队列,判断是否存在相对本地节点具有更低TTI值的邻节点。当此具有更小TTI的邻节点出现时,发送队列中存储的数据分组。在本地节点具有最佳TTI的情形下,HDMARP协议规定了3种不同的工作模式:
(1)FERRY模式。将接收到的数据分组存储至一个无限长的队列中,直至发现具有更小的TTI节点。
(2)BUFFER模式。将接收到的数据分组暂存至一个有限长的队列中,直至发现具有更小的TTI节点。
(3)DROP模式。丢弃接收到的数据分组。
3.2 算法描述
HDMARP算法具体实现步骤为:
1)当节点S需要向节点D发送或转发一个数据分组时,首先检测目的节点D是否为源节点S的邻居节点,如果是则直接将分组传递给目的节点D,否则进入贪婪转发模式,执行下一步。
2)分别计算所有邻节点的TTI值,见式(6)。
3)判断是否出现本地最小问题。若没有出现,执行下一步;否则,根据HDMARP协议所处的不同的工作模式对数据分组进行处理,直至寻找到具有更小TTI的邻节点转发分组,转步骤1)。
4)在所有邻节点中选择一个TTI值最小(min{TTIx1,TTIx2,…,TTIxn},TTIxi为节点 S的第 i个邻节点的 TTI值)的邻节点(如图3中为Y),即最优邻节点,作为数据分组的下一跳,然后将数据分组转发给该最优邻节点。
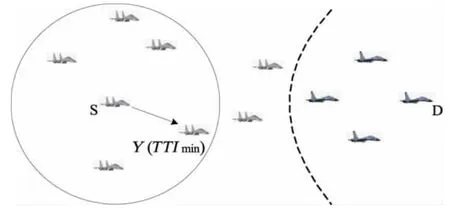
图3 HDMARP算法说明
5)转至步骤1),该过程一直重复,直到数据分组到达目的节点D。
4 协议性能仿真
4.1 仿真环境
本文采用NS2[12]作为网络仿真工具,在NS2网络仿真平台上实现了6种类型的HDMARP协议,这6种类型协议由综合考虑节点获取地理位置信息的方式的2种机制以及本地最小问题的3种模式组合得到,包括HDMARP_FERRY_BEACONING,HDMARP_FERRY_PIGGY,HDMARP_BUFFER_BEACONING,HDMARP_BUFFER_PIGGY,HDMARP_DROP_BEACONING,HDMARP_DROP_PIGGY,并将其与典型的Ad hoc网络路由协议AODV,DSDV进行比较。网络拓扑模型设定为10~100个节点随机分布在仿真区域内。仿真场景中参数配置如表1所示。

表1 参数配置
4.2 比较策略
通过收集以下统计量来比较不同路由协议的性能:
1)平均端到端时延(Average End to End Delay,ETE-Delay)
ETE-Delay是从源节点成功到达目的节点的所有数据分组的端到端时延的平均值。该时延包括路由寻找期间的缓存时延、接口排队时延、MAC层重传时延、空中传播时延等所有可能时延。时延越小,表明协议性能越好。假设源节点有N个数据分组要发送,第i个数据分组发送的时延为接收时间与发送时间之差,即T(i)receive-T(i)transmit,则所有数据分组的平均端到端时延为

2)报文交付率(Packet Delivery Ratio,PDR)
该指标用来衡量路由协议投递数据分组的效率。该值越大,表明越多的数据分组被成功发送至目的节点,说明该协议的性能越好。其中,PDR=

3)路由开销(Routing Protocol Overhead,RPO)

4.3 仿真结果分析
图4反映出网络中节点数的变化对报文交付率的影响。从图中可以看出,当网络中节点数增加时,所有路由协议的性能都受到不同程度的影响,但AODV,DSDV协议的下降趋势更加明显。DSDV和AODV协议的PDR随着节点数的增加迅速降低。HDMARP_FERRY_PIGGY协议性能最佳。当节点数小于90时,所有模式下的HDMARP协议的PDR均随着节点数的增加而增加;当节点数大于90时,PDR开始有所下降,协议性能出现细微的退化,这是因为节点数的增加直接导致节点密度的增加,从而使每一跳节点贪婪转发成功的概率增加,从而报文交付率增加。可见,HDMARP在较大规模的网络中依然具有较好的协议性能。
图5给出了平均端到端时延随着节点数增加的变化情况。从图中可以看出,对于HDMARP协议,FERRY模式和BUFFER模式平均时延较大,这是因为在这两种模式下路由出现本地最小问题时,数据分组被存储在相应的队列中,直至寻找到下一跳最优邻节点,这种排队时延在一定程度上增加了网络的平均端到端时延。BUFFER模式下由于节点仅暂存数据分组,超过截止时间或超出队列长度时分组将被丢弃,所以其时延低于FERRY模式。虽然HDMARP协议时延比较大,但是从图4的仿真结果可以看出这两种模式下,报文交付率较其他协议性能更优。在DROP模式下,如果节点发现没有可用路由,则直接丢弃接收到的数据分组,所以其时延最小。此外,需要特别指出的是,FERRY模式和BUFFER模式下平均时延随着节点数的增加而有所减小,而对于AODV,DSDV以及DROP模式,平均时延均随着节点数的增加而增加。这是由于在FERRY和BUFFER模式下,当节点的密度较少时,很容易出现本地最小问题,从而出现贪婪转发失败的情况;随着节点密度逐渐增大时,贪婪转发模式的优势就更加明显,分组将会被更快地转发至目的节点。

图4 报文交付率与节点个数的关系
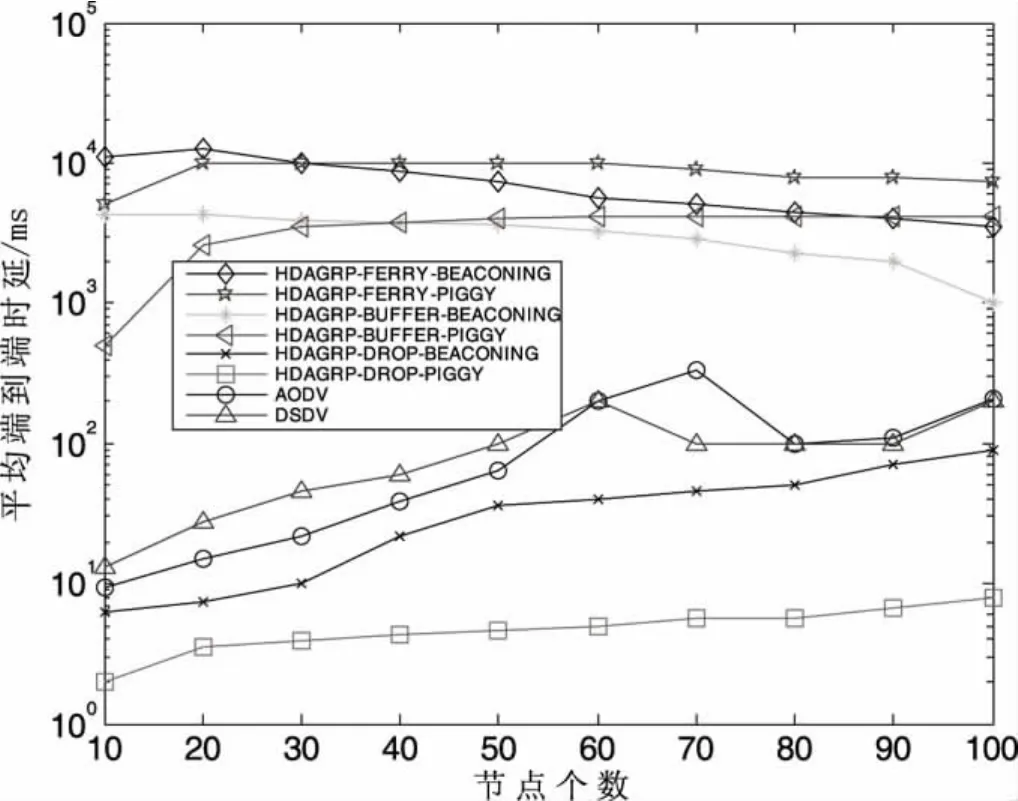
图5 平均时延与节点个数的关系
图6描述了平均路由开销随着节点数增加的变化情况。AODV的路由开销随着节点数的增加呈指数上升,且在节点数为[30,50]区间上升速率最快。DSDV和HDMARP的路由开销随着节点数的增加均呈现不同程度的线性增加,其中,DSDV路由开销从节点数为10时的18 kbit/s线性增加到100个节点数时的1.7 Mbit/s。HDMARP_BUFFER_PIGGY和HDMARP_DROP_PIGGY路由开销最低,这是因为捎带模式(PIGGY)分组中携带了地理位置信息减小了控制分组的发送。此外,DROP模式在没有可用路由时直接将分组丢弃,减少了网络中传输的分组数,从而大大减少了协议的控制开销,提高了协议性能。
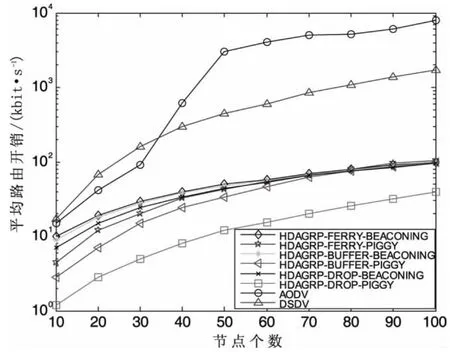
图6 平均路由开销与节点个数的关系
5 结束语
本文设计并描述了一种基于地理位置的HDMARP,对协议的性能进行了仿真,并将其与现有的路由协议AODV和DSDV对比分析。结果表明,该协议HDMARP_BUFFER_PIGGY模式具有最优的协议性能,且HDMARP协议在不同运行模式下提供性能权衡,能够较好地满足军事航空自组网高动态需求和作战应用。
[1]于宏毅.无线移动自组织网[M].北京:人民邮电出版社,2005.
[2]SAKHAEE E,JAMALIPOUR A.The global in-flight internet[J].IEEE Journal onSelected Areasin Communications, 2006,24(9):1748-1757.
[3]KARRAS K,KYRITSIS T,AMIRFEIZ M,et al.Aeronautical mobile ad hoc networks[C]//Proc.14th European Wireless Conference.Prague,Czech Republic:IEEE Press,2008:1-6.
[4]LEONARD J,SCHIAVONE.Airborne networking:approac-hes and challenges[C]//Proc.2004 IEEE Military Communications Conference.Las Vegas,NV,United States:IEEE Press,2004:404-408.
[5]ROHRER J P,JABBAR A,ETINKAYA E K,et al.Airborne telemetry networks:challenges and solutions in the ANTP suite[C]//Proc.Military Communications Conference.[S.l.]:IEEE Press,2010:74-79.
[6]JABBAR A,STERBENZ J P G.AeroRP:a geolocation assisted aeronautical routing protocol for highly dynamic telemetry environments[C]//Proc.International Telemetering Conference.[S.l.]:IEEE Press,2009:26-29.
[7]SHI Congjun,REN Qinghua,ZHENG Bo,et al.Analysis of node density and probability of forming a network in military aeronautical ad hoc networks[C]//Proc.Microwave and Millimeter Wave Technology.Nanjing:IEEE Press,2008:1980-1982.
[8]LIDOWSKI R L,MULLINS B E,BALDWIN R O.A novel communications protocol using geographic routing for swarming UAVs performing a search mission[C]//Proc.IEEE International Conference on Pervasive Computing and Communications.[S.l.]:IEEE Press,2009:1-7.
[9]朱晓芳,华蓓.高动态移动自组网路由协议研究[J].电子技术,2010,10(3):82-84.
[10]IORDANAKIS M,YANNIS D,KARRAS K,et al.Ad-hoc routing protocol for aeronautical mobile ad-hoc networks[EB/OL].[2011-03-01].http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.132.8129.
[11]SAKHAEE E,JAMALIPOUR A,KATO N.Aeronautical ad hoc networks[C]//Proc.Wireless Communications and Networking Conference.[S.l.]:IEEE Press,2006:246-251.
[12]TCHAKOUNTIO F,RAMANATHAN R.Tracking highly mobile endpoints[EB/OL].[2011-03-01].http://dl.acm.org/citation.cfm?id=605991.606003.
[13]于斌,孙斌,温暖,等.NS2与网络模拟[M].北京:人民邮电出版社,2008.
