基于西门子S7-200PLC的温度控制
2011-06-07孙静
孙 静
(黎明职业大学 机电工程系,福建 泉州 362000)
在工农业生产和生活中,温度往往作为一个非常重要的物理量,需要准确地加以控制调节.随着传感器技术和各种控制方法的不断发展,人们对控制的精度和速度也提出越来越高的要求[1].PID调节是经典控制理论中常见的一种控制方式,对存在较大惯性环节或滞后环节的物理量(如温度)具有较好的调节作用.而PID调节中至关重要的就是对控制器的参数整定.PID整定方法主要有两种:一是理论计算整定法,主要依靠系统的数学模型,经过理论计算确定控制参数,并通过工程实际进行调整;二是工程整定法,依靠经验,直接在试验中进行整定.本文采用工程整定法,利用西门子S7-200PLC温度控制模块详细介绍了PID参数进行整定的过程,给出相应整定过程曲线,达到最优参数组合,实现对温度的控制.并通过WinCC flexible组态软件建立友好人机界面,实现在线监控.
1 控制系统原理
系统采用S7-200PLC作为控制器,主机模块选用CPU224XP.CPU224XP本体提供了两路模拟量输入端子A+和B+,对应地址通道为AIW0和AIW2.这里采用AIW2作为信号输入地址,输入信号范围-10~+10V电压信号.温度信号的检测传感器采用铂电阻PT100,其测量精度高、性能稳定可靠,测量范围为0~100℃.传感器将温度信号转化成0~10V的电压信号送至CPU224XP,再将电压信号转化为0~32000的数字信号.PLC将当前测量值与设定值进行比较产生一个比较偏差,经PID运算后发出控制信号,当温度低于设定温度时,由PLC输出端Q0.6控制加热电阻加热,当温度高于设定温度时,由PLC输出端Q0.7开启风扇(如图1),最终实现温度的自动控制.
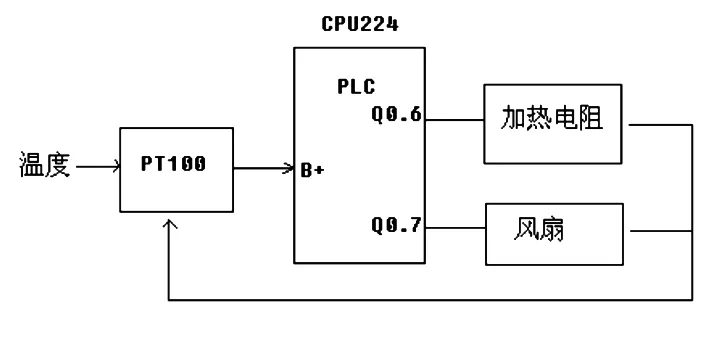
图1 控制原理示意图
2 PID控制原理
PID控制即比例、积分、微分控制,是一种自动控制方法,目的是使被控物理量追随给定值并快速趋于稳定,且能够自动消除各种因素对控制效果的扰动[2].PID控制系统是典型的闭环控制系统,系统框图如图2所示,其中Sp(t)是设定值,Pv(t)为过程变量(反馈量);c(t)为系统的输出量,PID控制器的输入输出关系如式(1)所示:
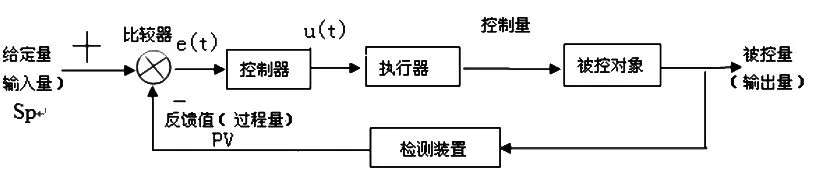
图2 PID闭环控制系统框图
(式1)
式1中,u(t)为控制器输出;uo为回路输出初始值;e(t)=sp(t)-pv(t)为误差;Kc为比例系数;Ti为积分时间常数,Td为微分时间常数.从该式可以看出,控制器的输出量与比例系数和微分时间常数成正比例关系,而与积分时间常数成反比例关系.采用PID调节其目的就是调节Kc、Ti和Td这三个参数.比例控制是一种最简单的控制方式,增大比例系数有利于减小静差,加速系统的响应,但比例系数过大会使系统产生大的超调,甚至震荡,使稳定性变差.积分调节,其控制器输出与偏差的积分成正比,随着时间增大,推动控制器输出变大,使稳态误差减少,可消除静差,但是降低了系统响应速度.微分调节,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系,使系统对反馈变化趋势预测调整,具有超前调节作用.
3 S7-200PLC温度模块参数整定
S7-200CPU提供了8路PID功能,通过PID指令功能块实现控制.STEP7-Micro/WIN提供了PID指令向导,在向导中填写参数,便可自动生成PID子程序.这里我们将反馈的过程量输入到模拟量输入通道AIW2,加热电阻由PLC的输出端子Q0.6控制,风扇由输出端子Q0.7控制,生成的子程序PID0-INIT通过SM0.0调用,控制程序如图3所示,其中PID子程序中Seption为设定值,这里设定理想温度为45.0℃,I1.2为手动模式控制按钮,当其为ON时为手动模式,这里我们设置其为自动模式,即通过PID参数整定进行输出控制.本系统中输入的过程变量的范围为0~32000,对应温度值为0~100℃,要显示当前温度需将数字量转化成温度值.Scale-I-to-R即是将过程变量(数字量)转化成温度值子程序.系统还设置了上下限报警,当温度超过55℃时,Q1.0控制的指示灯亮,低于35℃时,Q1.1控制的指示灯亮.

图3 PID控制程序
将程序下载至PLC,并切换到运行状态,此时利用STEP7-Micro/WIN4.0提供的PID控制面板对参数进行自整定[3].在系统自整定之前,先进行手动整定,当参数接近系统自整定参数时再选择自动整定,提高整定的成功率.下面将整定过程介绍如下:
首先整定比例增益,这时先不设置积分和微分环节,即将积分时间常数设置为无穷大,微分时间设置为0,采用临界值震荡法进行整定.先给Kc设定一个大值,这里设置20,将这几个参数下载到PLC中,观测控制效果图如图4,此时可以看出图中产生了大的震荡,且过程量PV迅速增大并超过设定值Sp,说明比例系数太大,出现超调.因为比例与输出成正比关系,因此需要慢慢减小Kc,当Kc值降低到13时,系统震荡几乎消失,如图5所示,PV趋于稳定且接近设定值,当前Kc值即为我们手动调整的比例增益.
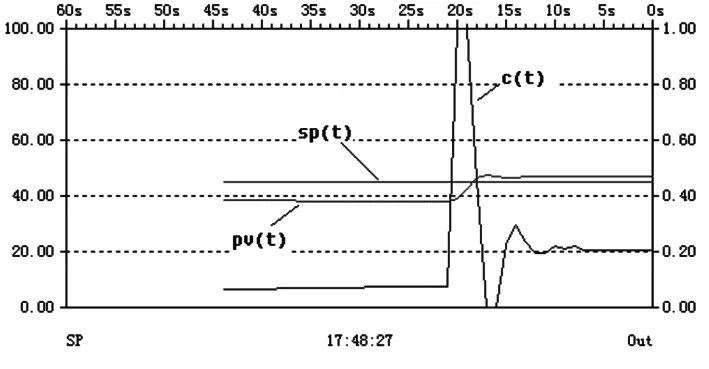
图4 整定Kc=20.0的控制曲线
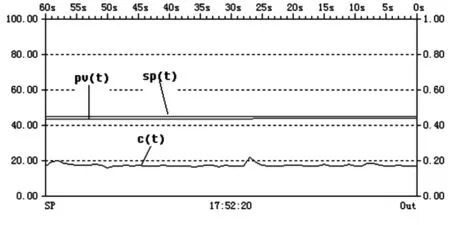
图5 整定Kc=13.0的控制曲线
从图5中看出,Kc调整后,虽然PV已经很接近Sp,但是仍然存在静差,为消除系统静差,我们引入积分环节.调节时依然使用临界值震荡法.因为积分时间常数与系统输出成反比例关系,我们先取一个较小的积分时间常数Ti=0.01,比例系数保持不变,此时系统会再次出现震荡,需要慢慢增大积分时间,当增大到Ti=0.03时,系统震荡慢慢消除,且过程量PV更趋近甚至基本等于设定值Sp,如图6所示,这时Kc、Ti值即为系统手动整定参数值.

图6 整定Kc和Ti后的控制曲线
微分环节能够提前预测趋势变化,实现超前调节,适用于像温度这样的大惯性对象.这里在采用PI调节后,再引入微分调节,提高系统响应速度.微分调节与上述调节方法一样,先给Td一个大参数,使其产生震荡,然后慢慢减小参数值,直到震荡基本消除,取此时的Td为手动整定值,Td=0.02,如图7所示.
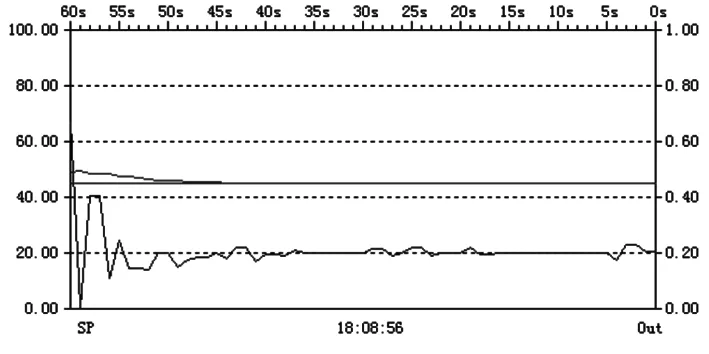
图7 整定Kc=13.0,Ti=0.03,Td=0.02后的控制曲线
手动整定后,选择自动调节,这样系统就根据我们已经整定好的参数进行自整定,以得到PID调节的最优参数值.最后将自整定好的参数下载到PLC中,系统将保留当前参数作为PID调整的最终参数.
4 组态画面设计
为了实现在线监控,使控制系统的界面更加直观,采用WinCC flexible2007组态软件对画面进行组态,利用变量编辑器创建PLC连接变量,将画面中各对象地址与PLC地址相对应[4].组态的温度控制主画面如图8所示.画面中显示出PID整定的最优参数值,当前温度可以通过棒图显示,当超过温度上限或者低于温度下限时,对应的指示灯进行闪烁显示,点击风扇按钮启动风扇,系统能够快速调整并迅速达到设定值.
5 结论
本文利用西门子S7-200PLC,结合PID温度控制模块对PID参数进行整定,并使用WinCC flexible2007设计人机界面,实现对温度的实时监控.调节最佳系统参数后,温度可以控制在目标温度-0.3℃~+0.3℃范围内,而且加入扰动,系统也可以快速接近目标值[5].
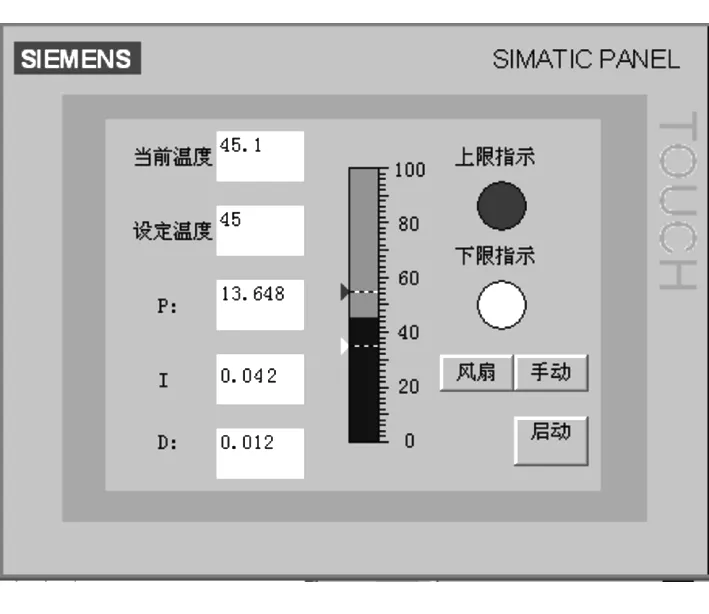
图8 温度控制组态画面
参考文献:
[1]李国萍.基于PLC的温度控制系统[J].科技创新导报,2010(7).
[2]蔡行健,黄文钰.深入浅出西门子S7-200PLC[M].北京航空航天大学出版社,2006.
[3]曾喜娟,庄其仁,吴志华.基于S7-200PLC的PID参数自整定方法[J].控制与检测,2010(1).
[4]刘伟,房奎竹,兰波.基于西门子WinCC flexible和STEP7的虚拟电梯设计[J].中国科技信息,2009(13).
[5]俞海珍,张维山,史旭华.基于PLC和WinCC的温度控制系统[J].工业控制计算机,2009(12).
