深水软基半圆体弧线段安装施工关键技术
2011-06-06张鲁生杨洪武
张鲁生,杨洪武
(山东港湾建设集团有限公司,山东 日照 276826)
0 引言
半圆形防波堤是一种较新型的防护性构筑物,堤身由半圆形拱圈和底板组成,安放于抛石基床之上,该结构在日本九州宫崎港首次应用,由中交第一航务工程勘察设计院在国内加以发展并率先实施[1-3]。随着航运事业的发展,防波堤逐渐向深海发展,而我国远离海岸的地基土多为物理力学性质较差的软黏土或淤泥[4],对于深水软基条件下的防波堤结构选型而言,轻型重力式结构的半圆形防波堤是一种经济合理的选择。随着该种结构的适用范围日益广泛,半圆体构件的尺寸渐趋大型化,以及预制出运条件的复杂化,常规安装技术已无法满足现场施工的需求,安装工艺需进行进一步的优化创新,以解决随之凸现的新难点和面临的新问题。
1 工程概况及特点
金线顶地段整体改造水工二期岛式防波堤工程为中交一航院设计的适合深水软基的大型半圆体轻型结构,位于威海湾中部突出的岬角金线顶附近,北东南三面临海,北接幸福公园,南邻威海公园,东距刘公岛3.0 km,为威海滨海标志性地段。其半圆体构件高8.5 m,拱圈厚0.7 m,外径7.2 m,底板厚1.3 m,底宽18.4 m,单件长度5 m,单件重量470 t,半圆体数量共计170个。防波堤纵轴线为半径1 500 m的圆弧段,圆弧长度为863.335 m。该半圆体为目前亚洲应用于实际工程中尺寸最大的半圆体构件。
本工程采用水上打设塑料排水板进行深水软基处理,其上为抛石基床,半圆体安装于整平基床之上,典型断面见图1。本防波堤形式为弧形岛式防波堤,弧线段对半圆体的安装精度要求较高,深水软基安装半圆体初期沉降位移较大,海陆均不适宜传统测量仪器架站,而且深水软基初期沉降大的特性决定了基床的预留沉降大,形成高基床,高基床之上的水深无法满足起重船吃水要求,因此必须根据本工程的结构特征和自身特点来确定半圆体的安装工艺。
2 自然条件
岛式防波堤-7 m水深处施工期采用10 a一遇的E向设计波浪要素:设计高水位1.15 m时,H1%=3.2 m,H5%=2.7m,H13%=2.3m,平均T=7.1s。设计低水位-1.13m时,H1%=2.8m,H5%=2.3m,H13%=2.0 m,平均T=7.1s。
威海金线顶区域的最大风速达22 m/s,对应的强风向为NNW向及SW向,次强风向为NW、NNE向,常风向为NNW及NW向,频率都是11%。年平均气温12.3℃,多年极端最低气温-13.8℃,夏季极端最高气温38.4℃。年平均降水量793.4 mm,年最多降水量1 192.7 mm,最少降水量450.5 mm。
该区域内各土层分布较有规律,在勘察深度范围内自上而下主要有:淤泥、淤泥质黏土、粉质黏土、粉细砂、粉质黏土混砂、细中砂、残积土、全风化花岗岩、强风化花岗岩。

图1 金线顶地段整体改造水工二期岛式防波堤典型断面图
3 半圆体安装施工工艺流程
本吊装主要施工工艺分为起吊、装船和安装三部分,其工艺流程为:起重船双钩转单钩并挂吊架→半圆体移至出运码头前沿→起重船和方驳于码头前沿就位→起重船挂钩起吊半圆体→起重船绞缆将半圆体吊至方驳→起重船方驳自航至安装施工区域→挂钩起吊半圆体并下放至海面→顶推船旋转半圆体至安装角度→依据邻近标准点a值安装半圆体→半圆体坐底,顶推船牵引摘钩。
4 施工工艺关键技术
4.1 起重船参数的确定
由于本工程出运码头为新建的方块重力式码头,为确保其沉降位移在允许范围之内,待吊装半圆体于出运码头胸墙后沿5 m以外放置。根据现场情况,单个半圆体重量470 t,吊钩钢吊架钢丝绳总重约50 t,起重船吊装半圆体吊距需要32 m左右,由起重船中南818船机参数表(表1)可知,选择臂架角度60°、幅度36.9 m进行吊装。

表1 自航起重船中南818船机参数
4.2 起重船双钩转换单钩装置
本工程采用1 200 t固定变幅式起重船中南818起吊半圆体,中南818船为双主钩,半圆体吊孔位于拱圈侧面,由于出运码头前沿线所限,半圆体纵轴线垂直于出运码头前沿线预制,受限于场地条件半圆体陆上转向困难,常规工艺的起吊角度无法满足安装角度要求,为解决该问题,设置双钩转换单钩装置,转换装置由横梁、夹板、吊轴、吊耳、单钩头和两根φ120 mm钢芯钢丝绳组成,通过该装置,可使固定变幅式起重船在吊装过程中具备旋转构件功能,通过顶推船辅助,半圆体旋转至需求角度进行安装,双钩转换单钩装置实物如图2所示。

图2 双钩转换单钩装置实物图
4.3 钢吊架的确定
吊装半圆体时,设置钢吊架改变半圆体受力方向,钢吊架主受力杆件由两根40bH型钢(钢号Q235B,马鞍山钢铁股份有限公司生产)采用翼板对接焊制而成,主受力杆件之间的支撑杆件由20号槽钢对扣焊接而成。钢吊架平面尺寸14.9 m×3.41 m,用于支撑4根φ100 mm的麻芯钢丝绳(WBF100型,巨力索具股份有限公司生产),钢丝绳单根长50 m,穿过吊钩钢销后对折,经由钢吊架的φ290 mm钢销改变受力方向,最后2个琵琶头挂于单钩之上。
4.4 起重船和方驳定位
起重船更换双钩转换单钩装置,并在其下挂好钢吊架。调整起重船位置进行挂钩起吊半圆体,将半圆体摆放于自航方驳之上,自航方驳装船完毕后,驳载半圆体至防波堤外侧安装区域,船身平行于已安装半圆体约15 m距离下锚定位,自航方驳定位完毕后,起重船垂直于已安装半圆体下锚定位,详见图3。
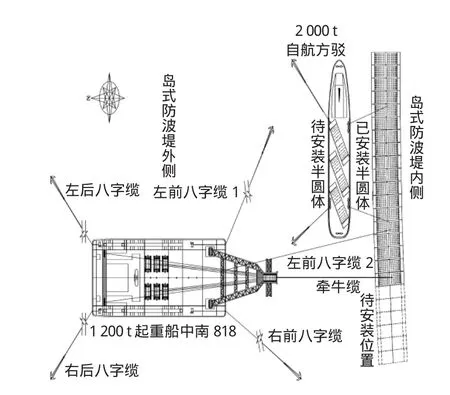
图3 起重船和方驳安装半圆体定位平面图
4.5 挂钩起吊半圆体
起重船和方驳准确定位在预定位置,起重船收紧左前八字缆1将吊钩定位于驳载半圆体的正上方,起重船缓慢掂钩至方驳甲板上方1.9 m(即吊钩与吊孔处于同一高度),控制吊钩位置,将吊钩推入吊孔(见图4)。起重船缓慢起钩,调整辅助吊钩与吊孔完全接触,起重船加载80 t后,检查吊钩与吊孔接触面是否严密吻合,起重船继续加载至半圆体离甲板0.5 m,进一步检查吊索吊具是否正常,检查正常后,起重船起吊半圆体,松掉左前八字缆1,收紧左前八字缆2,通过牵牛缆和右前八字缆将半圆体移出方驳,并缓慢掂钩至海面。

图4 吊钩推入吊孔
4.6 利用转换装置旋转半圆体至安装角度
起重船缓慢掂钩将半圆体下放至海面,待海水浸润半圆体底板0.7 m高度左右时停止掂钩,利用两条顶推船进行缓慢旋转半圆体,直至半圆体满足安装需求的角度(见图5),将半圆体底板浸润一定高度再进行顶推旋转,其一为便于顶推船的顶推,其二是因为半圆体通过双钩转换单钩装置可以旋转至任意角度,利用海水的相对阻力和黏滞特性可以控制半圆体的旋转速度,易于达到安装需求角度。
4.7 测量定位难点及处理措施
本防波堤形式为弧形岛式防波堤,现场条件不适宜传统测量仪器架站,GPS技术的RTK技术相对于传统测量仪器而言,具有精度高、速度快、不需要通视、可实时定位等优点,然而对于本工程而言,对吊装坐底过程中的半圆体采用RTK进行实时定位理论上可行,但起重船的臂架和钢吊架钢丝绳等会严重阻挡、反射或折射卫星信号,实际操作中在吊架下使用RTK,其卫星信号会完全被屏蔽,无法进行点放样。因此半圆体的安装需采取一定措施既能保证利用RTK定位的优点,又能避免障碍物对信号的屏蔽问题。
为解决测量定位的难点,利用邻近已安装半圆体的标准点进行安装。吊装前在半圆体顶部设置安装纵轴线和安装控制点(K1点和K2点),设置方法为:在半圆体顶部正中沿纵轴线方向弹设墨线,该线即为半圆体的安装纵轴线,从每个半圆体的纵轴线(墨线)两端点向内返10 cm,设立2个安装控制点(K1点和K2点),并用十字墨线标记,如图6所示,安装时半圆体从东向西进行安装,每个半圆体坐底时,其东侧安装控制点(K1点)以上一个已安装半圆体的标准点(B2点)坐标来控制。即半圆体安装完毕,起重船摘钩后绞缆移船到方驳位置吊装下一个半圆体,此时用RTK在已安装的该半圆体上进行标准点(B2点)的放样,B2点即为已安装半圆体K2点的设计位置,其轴线偏差值记为a,下一个半圆体安装时,其经过K1点的纵轴线对准偏离已安装半圆体控制点(K2点)的a/4处(B2点和K2点之间)进行掂钩坐底,接缝局部大样图如图7所示。

图5 顶推船旋转半圆体

图6 半圆体安装控制平面图
4.8 半圆体安装坐底的质量控制
在安装过程中,用事先准备好的缝板在两半圆体之间控制安装缝宽度,并可防止坐底过程中的半圆体磕碰已安装半圆体。根据安装期间的水位情况,从底板以上的以第2排孔或第3排孔为缝板控制区,缝板控制区域和缝板厚度详见图6。两条顶推船分别在半圆体南北缝板控制区域,由安装工利用缝板控制缝宽。针对坐底过程中半圆体的纵轴线纠偏而言,本工程的缝板增减厚度△d和坐底过程中半圆体B2点的纵轴线偏差△h关系为:△d=1.4△h,即缝板每增加或减少1.4个单位厚度,则坐底过程中的半圆体B2点的纵轴线偏差会相应变化1个单位距离,利用该关系进行现场安装,可根据已安装半圆体的a值快速确定下一个半圆体的缝板增减厚度。
坐底过程中的半圆体,其纵轴线对准偏离已安装半圆体标准点(B2点)的a/4处,然后起重船缓慢掂钩,直至起重船荷载降至100 t并坐底,此时对半圆体位置和接缝进行校核,满足要求后,起重船继续掂钩,两条顶推船辅助牵引摘钩,若半圆体坐底后位置有偏差,则起重船起钩,重新安装,直至半圆体位置偏差符合设计要求和规范规定。

图7 半圆体接缝局部大样图
5 结语
1)设置双钩转换单钩装置,使半圆体在起吊过程中可进行平面任意角度旋转,解决了弧形岛式防波堤对安装角度要求高(每个半圆体安装角度均不相同),以及在高基床和出运码头前沿线受限的条件下常规工艺的起吊角度无法满足安装角度要求的难题,提高了安装精度,而且半圆体出运至码头前沿任意角度摆放均可吊装,简化了施工工序,提高了工作效率。
2) 利用上一个半圆体的标准点和控制点来定位坐底过程中的半圆体,既能保证利用RTK定位的优点,又能避免障碍物对信号的屏蔽问题,实际应用结果表明,该方法能够满足安装设计要求和现行规范规定。
3)相邻半圆体之间以偏差a/4来控制纵轴线纠偏,为本工程现场安装的经验值,能够满足对坐底过程中的半圆体进行纵轴线纠偏,并且控制相邻半圆体的错台在允许范围之内。得出缝板增减厚度△d和坐底过程中半圆体B2点的纵轴线偏差△h关系:△d=1.4△h,利用该关系进行现场安装,可以根据已安装半圆体的a值快速确定下一个半圆体的缝板增减厚度,达到对半圆体纵轴线进行准确纠偏的目的。
4) 本工艺适用于出运码头前沿线有限,半圆体纵轴线垂直于出运码头预制且陆上转向困难时,在深水软基高基床之上进行弧线段及其他非直线段防波堤半圆体的安装,对于提高常规半圆体防波堤的安装精度和工效,亦有参考作用。
[1] 徐光,谢善文,李元音.防波堤的新型结构型式[J].水运工程,2001(11):20-25.
[2]谢善文,李元音.长江口深水航道治理工程中的新型半圆型导堤结构设计[J].水运工程,2006(12):28-33.
[3]谢世楞.半圆形防波堤的设计和研究进展[J].中国工程科学,2000,2(11):35-39.
[4] 赵晓岚,李元音,吴进,等.半圆型海堤断面的结构设计[J].港工技术,2005(2):19-21.
