利用面向对象法构建反导空中目标三维弹道仿真研究*
2011-06-06龙鹏林平
龙 鹏 林 平
(海军兵种指挥学院 广州 510430)
1 引言
水面舰艇防空反导除了需要进行理论研究外,还应进行一定的仿真模拟来研究防空反导的作战过程以对理论进行检验和支持。此前的仿真主要集中在弹道模型和引导规律的理论研究及武器系统、单舰、编队的作战能力评估等数学模型建立,少有专门进行具体可行的建立通用标准化仿真架构。本文利用面向对象的方法,抽象水面舰艇防空反导过程,研究仿真模型中各个部分的关系并建立相应的类,确定类之间的继承关系,可以作为一个通用构件给需要此类任务的模型或软件使用或提供参考。
2 类的抽象和继承

图1 类的继承关系
类是面向对象程序设计的核心,是对某一类对象的抽象,类和具体对象是紧密相关的,类抽象定义的好坏亦将关系到程序的通用性和发展性。
影响水面舰艇防空反导空中目标三维弹道的因素有导弹和目标机动性能、探测系统性能、制导方式和采用的引导规律,因此类的抽象和继承如图1所示。
CManeuver类作为物体机动类封装了坐标参数、机动状态参数、坐标计算转换函数、运动状态改变函数和过载限制函数。CDetectSys类为探测系统类主要封装了系统探测时的距离方位仰角误差和探测周期频率等参数、空间中各物体相对位置计算函数。CObj类封装导弹所处状态、各种引导规律函数。具体如表1所示。

表1 各个类的定义
3 类的实现
3.1 CManeuver类
3.1.1 空间坐标系模型实现

图2 空间坐标系表示
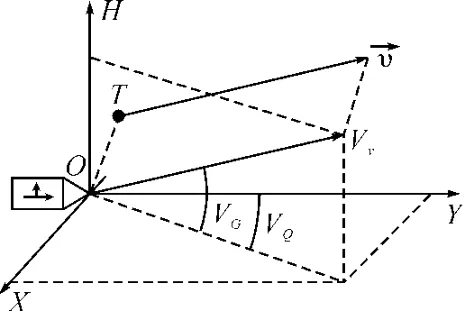
图3 速度矢量分解
空间坐标系采用三维空间的相对坐标系表示,即将水面舰艇置于坐标系中心原点视为静止,本舰航向为Y轴、XY轴位于海平面,其他目标以相对航速、相对航向进行机动并相应改变各自对本舰的相对距离、仰角及舷角,如图2所示。对于水面舰艇,坐标始终为(0,0,0),任意目标坐标为(D,Q,G)。
3.1.2 运动轨迹解算模型实现
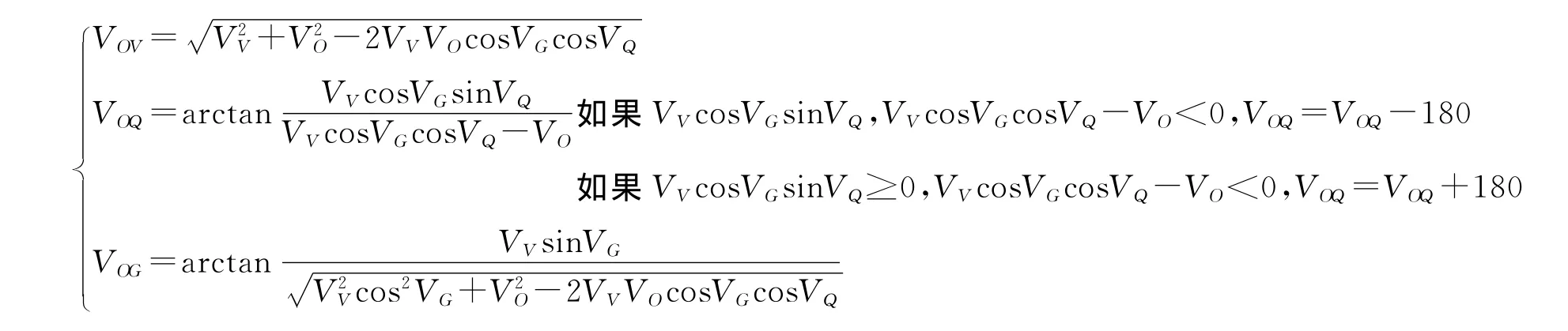
如图3所示,三维空间中任意目标T的速度矢量可以表示为(VV,VQ,VG),VV为速度大小,VQ、VG分别为航向和俯仰角,设当前水面舰艇航速为VO,可表示为(VO,0,0)。对于三维空间中的一个坐标为(D,Q,G)的目标,速度为(VV,VQ,VG),相对水面舰艇的速度为
经过时间Δt后,目标坐标(D′,Q′,G′)可由下式求出

3.1.3 过载限制实现
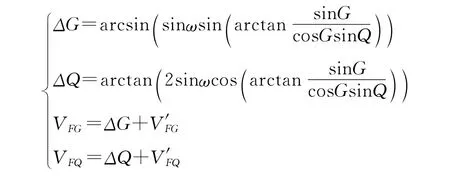
受最大过载影响,导弹按制导指令转向的转向角速度最大为ω,即

当α过大导弹无法完成当前机动时,取α=ω,相应的ΔG、ΔQ、引导信号(VFQ,VFG)变为
3.2 CDetectSys类
已知目标M和T的坐标分别为(Dm,Qm,Gm)和(Dt,Qt,Gt),则目标T相对于目标M的距离、舷角、仰角分别为

3.3 CObj类
CObj类主要封装了各种引导函数,现在对舰空导弹进行引导的方法主要有三点法和比例导引法,而又以比例导引法最为普遍,因此这里主要实现比例导引法。
测出目标视线在垂直和水平方向上变化的角速度ΔωV、ΔωH,由

可得到依比例导引法引导导弹飞向目标的引导指令ΔVG、ΔVQ,式中K为比例常数,k=1时比例导引法就成为追踪法,k=+∝时为平行接近法,k一般取值为3。核心算法可如下表示:

4 三维弹道仿真结果演示
假设目标参数为:目标方位右舷90°,目标捷径45km,目标高度3500m,目标作降高直线匀速飞行,航向-20°,速度220m/s;舰空导弹弹道初始条件为:导弹发射时刻导弹倾角85°、偏角90°,导弹最大可用瞬时转向角速度60°,比例导引系数3,无控段飞行时间2s。根据以上背景假设条件,可以绘制该垂直发射型舰空导弹运动学弹道三维图形,如图4所示。

图4 垂直发射型舰空导弹弹道仿真

图5 某反舰导弹弹道仿真
假设来袭反舰导弹飞行速度270m/s。导弹发射后变高至61m巡航高度,在距目标22km时主动雷达开机搜索目标,大约1~2s后捕获目标降低至10m并在主动雷达导引下转向目标,距目标3214m时开始进行末端跃升俯冲攻击机动,跃升角速度10°/s,导弹仰角变为40°时,跃升角速度-10°/s,导弹仰角变为0°时变为俯冲攻击,攻击仰角-40°,绘制该反舰导弹运动学弹道三维图形,如图5所示。
5 结语
本文的弹道仿真研究是基于垂直发射型舰空导弹利用面向对象方法抽象建类编程实现的,从仿真结果演示来看,弹道符合垂直发射型舰空导弹比例导引弹道和反舰导弹攻击弹道特征,可比较方便地改变成其他型号导弹弹道实现模型的检验以及弹道仿真的演示,便于维护改进。
[1]戴自立.现代舰艇作战系统[M].北京:国防工业出版社,1999:712~715
[2]郑阿奇.Visual C++教程[M].北京:机械工业出版社,2004:41~45
[3]马其东,马雷挺,钟志通.垂直发射型舰空导弹比例导引三维弹道仿真研究[J].导弹与航天运载技术,2008(3):15~19
[4]鲍平安,陈辉堂.比例导引法在机器人路径规划中的应用[J].航天控制,1997(1):17~50
[5]罗喜霜,张天桥.多用途导弹中末端交班研究[J].弹道学报,2001,13(4):47~50
[6]赵文成,金学英,那岚.末制导段比例导引法的改进[J].指挥控制与仿真,2009,31(4):97~99
[7]苏跃斌,辛长范,郭本亮,等.三维比例导引弹道的可视化仿真研究[J].弹箭与制导学报,2010,30(4):57~60
[8]汪浩,曾家有,马良,等.美舰空导弹武器系统反导作战流程分析[J].飞航导弹,2009(7):39~40
[9]高尚.比例导引理想弹道仿真[J].计算机工程与设计,2003(24):66~68
[10]李静,左斌,胡云安.基于变结构控制理论的导弹平滑导引率研究[J].海军航空工程学院学报,2007:314~316
