动力调谐陀螺仪角位移测试中的数据处理技术*
2011-06-06陈维义
罗 云 陈维义 沈 远
(海军工程大学兵器工程系1) 武汉 430033)(中国人民解放军第四八零五工厂军械修理厂2) 上海 200439)
1 引言
炮控系统是影响火炮武器系统精度的重要组成部分[1],因此在火炮武器系统定型试验和修理后验收试验中,炮控系统性能试验是非常重要的内容,其中包括:火炮漂移速度测试、火炮稳定精度测试、最大调炮速度测试、最小瞄准速度测试、超回量测试等[2]。对这些指标的测试,其核心是对火炮的角位移测试[3]。火炮的角位移获取后,这些参数就可通过对其处理、计算来获得。目前对炮控系统的性能参数测试的方法还是操作繁琐、费时费力的手工靶板测试方法,自动化程度不高,太过于落后,这对于武器系统的发展是不利的。文献[3]介绍了CCD+坐标靶、激光器+PSD光学测量靶、CCD+点光源、激光(光纤)陀螺、电测法五种角位移测试方法并比较了各自的优劣,以光纤陀螺作为测角传感器为首选方案。本文以此为参考,采用与光纤陀螺相似的动力调谐陀螺为测角传感器,研制了一套角位移测试系统,并对数据处理技术作了详细探讨。
2 系统组成及工作原理
测试系统的原理框图如图1所示,分为下位机数据采集滤波发送模块和上位机数据接收处理模块。其中陀螺仪为西安航天长城的HT-A3高精度动力调谐陀螺仪;下位机以ADI公司的ADSPBF532[4]为核心构成的嵌入式最小系统,外围配置信号调理电路和A/D采集电路,对双轴陀螺仪的角速度信号实时进行调理、采集、滤波、信号处理与发送;上位机采用可靠性高的军用笔记本,主要完成数据的接收、角速度的实时数值积分、角速度和角位移的实时曲线显示、数据保存、离线数据分析等功能。
在角位移测量的基础上,就可以完成各种火控性能参数的计算与分析。根据测试系统得到的各项结果与炮控系统的战术技术指标要求进行对比,来评判炮控系统综合性能是否合格。

图1 系统组成框图
3 角位移测量原理及误差分析
动力调谐陀螺仪(DTG)是一种双自由度的非液浮、干式弹性支撑、机电性的扰性陀螺仪[5~6],用于敏感惯性空间的角速度。把陀螺仪安装在火炮身管上就能检测出火炮在方位和高低向的运动,其输出为电压信号,利用比例因子,可以转化为相应的角速度。对角速度进行实时梯形数值积分,就可以实时输出火炮在方位和高低向所移动的角位移。
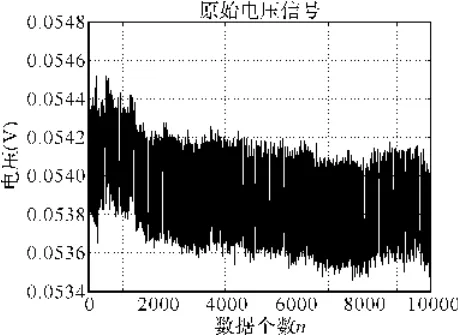
图2 原始的电压信号
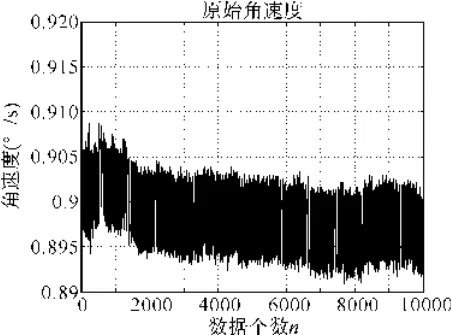
图3 原始角速度信号
4 在线实时数据处理方法
处理的方法要根据具体的应用来定。如果只是离线处理,由于样本数据已知,则可以对样本数据求均值后,利用样本数据减去均值就能消除其角速度的零点偏移对角位移的影响。如果是在线实时处理,则样本数据未知,无法求其均值,因此就不能利用离线处理的方法。下面就在线实时处理进行讨论其相关方法。
4.1 一次平均法求零点
首先对先前所采集的数据进行统计求均值得相应的角速度零点,然后后续的角速度零点减去一次平均法求到的零点,再对两者之差进行数值积分。相比直接对角速度信号直接数值积分,该法能大大减小角速度零点在数值积分时对角位移的影响。然而,随着积分时间的增加,由于角速度零点之差使积分带来的角位移仍会越来越大。图4的虚线就是采用一次均值求零点的数值积分所得到的角位移,从图中可知,当时间为990s时,一次均值求零点的数值积分所得到的角位移漂移为了-5.5539°,如果积分时间更长,则角位移的漂移也会更大,其精度不能满足本系统的需求,必须寻找其它的数据处理方法。
4.2 零点渐变算法[9~10]
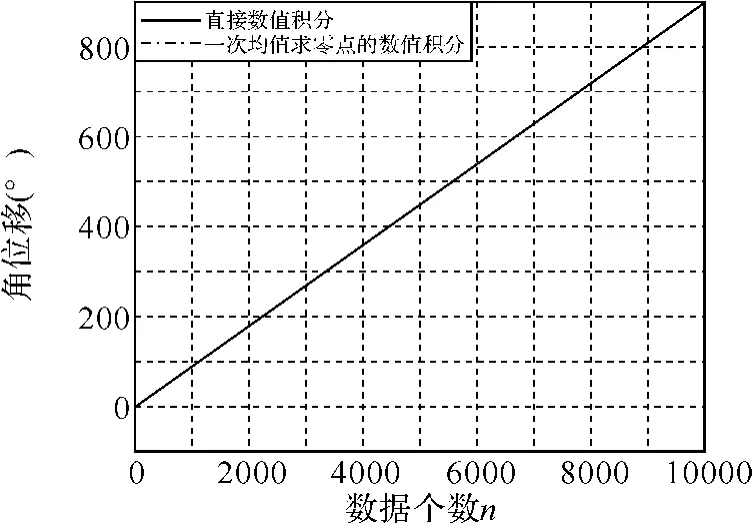
图4 陀螺仪静止时零点积分漂移曲线1

图5 零点渐变算法的流程框图
该算法的基本思想是:用多次平均法代替一次平均法求零点。实现的流程框图如图5所示。首先在陀螺静止时连续采集8个样本值作为初始基准零点,然后再次采集角速度值,并与初始基准零点进行比较,如果差值小于某个阈值,则说明陀螺仍处于静止状态,此时采用新的零点样本,否则仍采用旧零点样本,在此基础上计算新的基准零点,并取代初始基准零点。本系统设定阈值为0.0133°/s。对该算法进行仿真,并与一次均值求零点进行比较,其结果如图6所示,实线为一次均值求零点的数值积分所得到的角位移,而虚线为零点渐变算法的数值积分所到的角位移。从图中可知,当积分时间为990s时,前者的漂移为-5.5539°,后者的漂移为0.0061°。从零点渐变算法的数值积分漂移曲线放大图可以看出其变化趋势为:随着时间的增加,其漂移的绝对值会逐渐增大。因此,虽然后者的值较小,在短时间内满足系统要求,但其变化趋势不能忽视,因此提出了改进零点渐变算法。
4.3 改进零点渐变算法
改进零点渐变算法的目的是使零点积分漂移绝对值不随着时间的增加而增加,而是在零附近来回波动。基于该目的,给出了实现的基本方法:对角速度零点进行判断是否在上文提到的阈值内,如果是则认为陀螺静止,否则认为陀螺在运动。陀螺静止时使角速度零点样本交替改变符号来避免角速度恒为正或负,从而使零点积分漂移不会随着时间而单向增大。对该算法进行仿真,并与零点渐变算法进行比较,其结果如图7所示,实线为零点渐变算法的数值积分所到的角位移,虚线为改进零点渐变算法的数值积分所得到的角位移。从图中可知,随着积分时间增加,后者不会单向增加,而是在零附近波动,从而使得精度大大提高。当积分时间为990s时,前者的漂移为0.0061°,后者的漂移为0.0004°。

图6 陀螺仪静止时零点积分漂移曲线2

图7 陀螺仪静止时零点积分漂移曲线3

图8 陀螺仪静止时零点积分漂移曲线4
5 实验结果分析
静态实验是指陀螺静止时测试角位移测试系统的输出,其测试结果如图8所示。从图中可以看出,角位移漂移在零附近波动,在3991s时,实际的角位移漂移为0.0004°。可以看出,陀螺长时间内静止时角位移漂移也非常小,完全满足系统的精度要求。
动态实验是指陀螺仪运动时测试角位移测试系统的输出。将陀螺仪固定在高精度双轴转台2ST-520上,使转台在高低和方位运动,同时记录角位移测试系统所测的角位移和转台所测试的相对角位移。两者对比就可以得出角位移测试系统的测角精度。表1给出了在方位向角位移测试系统与转台的测试结果,由表中的数据可以得出,系统的测量精度在0.48%以内。考虑本系统主要是用于小角度测量,故精度完全满足要求。
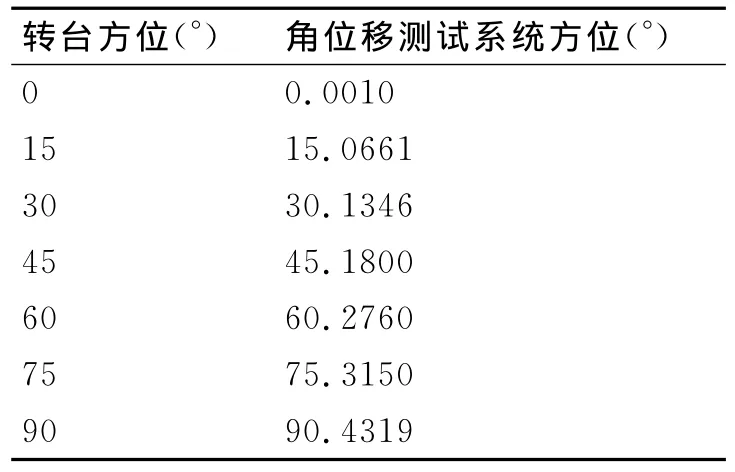
表1 角位移测试系统与转台的测试结果
6 结语
在炮控系统性能参数测试中,对角位移的测试是关键,本文首先分析了基于动力调谐陀螺仪的角位移测量原理,针对陀螺静止时角速度零点积分漂移大的问题,提出了改进零点渐变算法,使系统的精度得以提高。该测试系统具有通用性好、使用简单、测角精度高等优点,不仅可以用于坦克炮控系统性能参数测试,而且还可以用于舰载炮控系统的测试,因而具有比较好的推广应用前景。
[1]臧克茂,马晓军,李长兵.现代坦克炮控系统[M].北京:国防工业出版社,2003:5~11
[2]王春忠,杨忠国,荣明.基于陀螺仪的坦克炮控稳定精度检测仪设计[J].传感器与微系统,2009,28(1):85~87
[3]郝赤,赵克定,许宏光,等.炮控系统性能试验中角位移量的几种测量方法[J].火力与指挥控制,2004(12):103~106
[4]Analog Devices.Blackfin Embedded Processer,ADSPBF531/ADSP-BF532/ADSP-BF533[DB/OL].[2011.01].www.analog.com
[5]邹达明.动力调谐陀螺仪漂移测试与建模研究[D].哈尔滨工程大学硕士论文,2004,3:1~3
[6]范世珣.动力调谐陀螺仪的数字换技术研究[D].国防科学技术大学硕士论文,2006,11:1~2
[7]Analog Devices.16-Bit,1LSB,1MSPS Differential ADC,AD7677[EB/OL].[2002.07].www.analog.com
[8]罗云,孙春生,王昌平.基于ADuC834单片机的高精度电压监测系统[J].仪表技术与传感器,2007(10):50~52
[9]蔡军.基于光纤陀螺仪的轨道不平顺检测系统的研制[D].南昌大学硕士论文,2007,6:40~43
[10]朱洪涛,蔡军,王志勇.基于光纤陀螺仪的轨道不平顺检测系统[J].微计算机信息,2007(23):268~269
