基于FCM与PMHT的红外目标跟踪与检测算法研究*
2011-06-06程永茂
程 恭 刘 皞 程永茂
(海军装备部1) 北京 100080)(海军航空工程学院研究生3队2) 烟台 264001)
1 FCM聚类算法原理
模糊c-均值(FCM)算法最初是由Dunn在1973年提出的,后来由Bezdek进行了改进并推广到实际应用中去[1]。它可用于识别N维空间中球状的点集,是模糊聚类分析中最灵敏的方法之一,它不仅被模糊工程的研究者所接受,而且也被推广到其它一些科学的分枝,如医学诊断,计算机可视化、通讯及过程感测等。
FCM是一种依据最小二乘法原理,采用迭代法优化目标函数来获得数据划分的方法,它的损失(目标)函数定义如下[2]:
这里数据集合X={x1,x2,…,xn},xi∈Rs,n是待聚类数据点的总数,c是聚类中心数,指数m>1是用来调节模糊类之间分得隶属度的程度,增大m将增加函数的模糊性,使数据点的隶属度降低。在此算法中所要做的就是追求Jm的最小化。根据“如果函数Jm最小,则其对各个变量的偏导数为0”做如下推导:
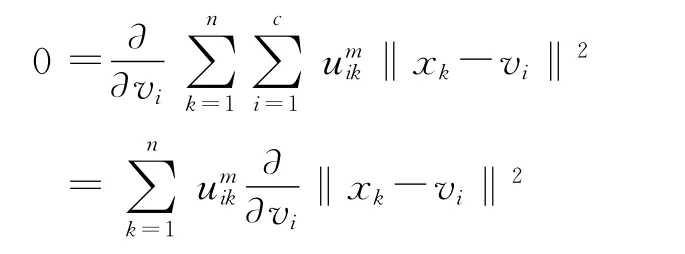
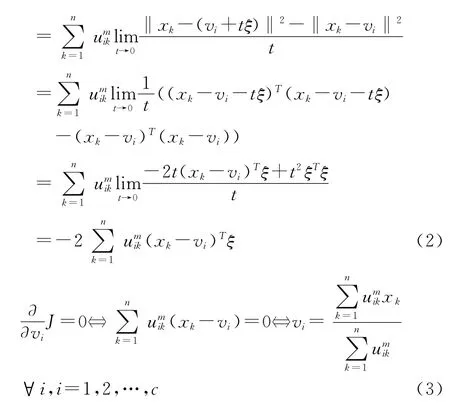
由上式即可获得聚类中心矩阵V={v1,v2,…,vc},这里每个vi都是有s个特征(指标)的一个聚类中心,即vi∈Rs。模糊分类矩阵就可由以下公式来获得:
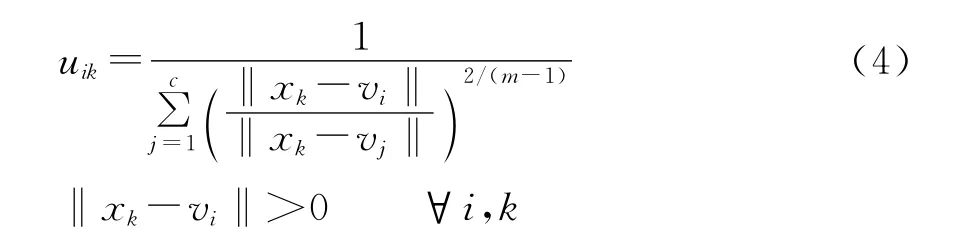
如果‖xk-vi‖=0,那么uik=1且对于∀j≠i,有uik=0。其中U要满足标准化条件:

模糊分类矩阵U被随机初始化,聚类中心矩阵可由对所有数据点运用式(3)来产生,算法步骤如下:
步骤1 随机初始化模糊分类矩阵Uk,置当前代数k=0;
步骤2 用式(3)计算聚类中心矩阵Vk;
步骤3k=k+1;
步骤4 按式(4)更新模糊分类矩阵Uk+1;
步骤5 按式(3)修正聚类中心矩阵Vk+1;
如果‖Vk+1-Vk‖<ε,则停止迭代,否则转步骤3。
2 模型参数的设置
1)设系统的状态向量为Xm(k)=[x(k),˙x(k),y(k),˙y(k)]T,x(k)和y(k)分别是图像中的横、纵坐标,˙x(k)和˙y(k)分别是图像中的横纵方向的速度分量。并设速度在横、纵坐标的转移标量为ax(t)和ay(t),T为序列图像帧间的时间间隔。则状态转移矩阵Fm(k)为[3]:

2)对每帧图像中选定的连通区域(即各个目标区域)记录如下区域特征[4]:目标区域平均灰度gki、区域像素面积ski、目标区域中心坐标(xki,yki)。其中k为帧数,i为对应的区域标记,0≤k≤NF,1≤i≤Mk,这里,NF为视频的总帧数,Mk为当前帧的多目标总数。
3 基于FCM和改进PMHT算法的红外弱小目标跟踪算法步骤[5~6]
1)设起始帧有M0个目标,首先初始化这M0个目标起始状态,并记录本帧的目标区域特征T0{gi,si,(xi,yi)}。其中:T0·gi为平均灰度、T0·si为区域像素面积、目标区域中心坐标(T0·xi,T0·yi)。
2)对接下来的第二帧同样记录M1个目标区域及其特征T1{gi,si,(xi,yi)},利用 FCM 来关联本帧和首帧间的区域。具体来说,定义目标函数为


3)对接下来的第M2帧同样记录M2个目标区域及其特征T2{gi,si,(xi,yi)},利用 FCM 来关联本帧和前一帧间的区域和确定L2个航迹后验关联概率。通过实现最小化目标函数J1(g,s,(x,y))来关联前后帧图像各个区域目标。航迹后验关联概率的计算是根据区域间的特征关联程度,从中找出航迹后验关联概率最大的假设航迹作为本帧每个目标区域的确认航迹[7]。
利用前一帧预测的本帧位置与本帧实际位置的差异来更新系统噪声方差阵(k),其定义为:(k)=Q0+ΔQm(k)。其中,Q0为初始系统噪声方差阵,ΔQm(k)为控制调整方阵。
这里定义控制增量:

当(yi(k)-(k))(xi(k)-(k))>0,r=1;否则,r=-1。
同样根据PMHT算法步骤⑸来预测各个目标下一步的位置{((3),(3))。
这里与本小节步骤2不同的是,对PMHT算法步骤(5)的式(3)作如下修改:

也就是在误差协方阵中增加系统噪声方差阵项来更新、调整和修正系统运动模型。
4)对随后的所有帧同样记录Mk(k>3)个目标区域及其特征Tk{gi,si,(xi,yi),ai}。这里,与前三帧不同的是:所定义的目标函数包含了目标运动过程中的运动方向(即航迹方向),其定义为J2(g,s,(x,y),a):
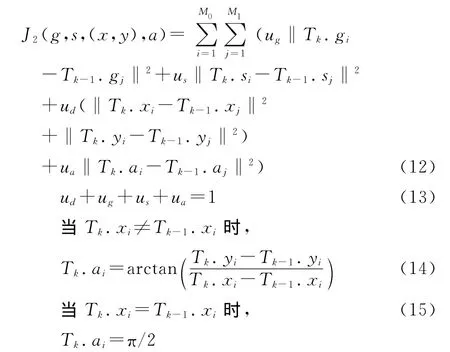
通过实现最小化目标函数J2(g,s,(x,y),a)来关联前后帧图像各个区域目标和确定Lk个航迹后验关联概率。对每个目标区域,选择航迹后验关联概率最大的假设航迹作为本帧的确认航迹。并且,通过预测的位置与本帧实际位置的差异不断修正运动模型参数(即系统噪声方差)。
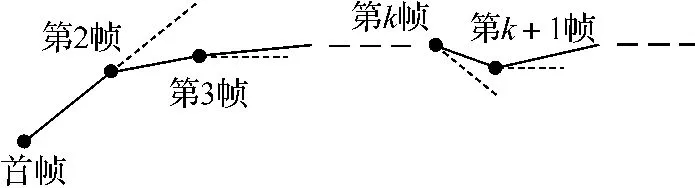
图1 运动目标跟踪模拟流程图
图1中,黑色圆端点表示运动目标的实际位置,实线表示运动目标的真实航迹,虚线则是文中算法预测的航迹。从图中可以看出,通过预测的位置与本帧实际位置的差异不断修正运动模型参数,使得对目标能够实现正确、有效的跟踪。
5)k=k+1,转到第4)步。
算法与传统PMHT进行雷达数据跟踪方法不同之处和改进的地方是:
1)通过区域特征,采用模糊聚类的思想来关联各个区域。并在其中加入了运动的航迹特征,这样既可以提高跟踪的准确率,又可以减少运算量;
2)根据预测的位置与实际目标运动位置的差异来更新运动模型,而不需要通过PMHT循环迭代方法使系统收敛,从而实现对多目标的跟踪。这样大大减少了运算量。
3)通过对下一帧目标位置的预测,既能提高下一帧中各个目标区域间的关联准确率,又能不断修正目标的运动模型,使得运动模型更接近目标实际运动过程,这样反过来提高了目标的预测精度,从而进一步提高了多目标区域间在前后帧中的关联准确率。从这方面来看,该方法处理过程是一个良性循环过程。
4 候选目标排序和检测结果输出
N次累积后,根据目标特性,按照指定规则对预选的多目标进行排序,如果以目标灰度和区域面积为参考进行排序[8],令


5 实验与结果分析
采用分辨率为320*240、响应波段为8~14μm、帧频为25帧/秒的红外成像设备进行红外弱小多目标跟踪实验和算法检验。实验内容是跟踪港口中的四个弱小目标船只。在海天线提取的基础上[9,11],根据候选目标的特征和先验知识,可以得到平均灰度在区间(100,180)、像素面积在区间(5,30)内如图4显示的三个候选目标{T1,T2,T3}。后续图像中,目标T4在第162帧出现在图像场景中,在第833帧目标T3与T2合并。图2~图4分别为第10、172、833帧原始红外图像;图5~图7分别为第10、172、833原始图像中海天线提取图像;图8~图10分别为对应图2~图4运用文中提出的基于FCM和改进PMHT算法的红外弱小多目标跟踪与检测图像。

图2 第10帧图像

图3 第172帧图像

图4 第833帧图像
图5 海天线提取图

图6 海天线提取图
图7 海天线提取图
图8 多目标跟踪图
图9 多目标跟踪图

图10 多目标跟踪图
整个跟踪过程中,目标1和目标2停泊在岸边静止不动,目标4快速地从场景左边出现直至从场景右边消失,同时目标3以相对较慢的速率从场景的右边向左边缓慢运动。
应用基于FCM和改进PMHT算法步骤实现对以上四个目标的连续跟踪。通过目标区域特征和运动航迹特征,采用模糊聚类的思想来关联前后帧各个子区域。利用前一帧预测的本帧位置与本帧实际位置的差异来更新系统噪声方差阵(k),通过不断修正目标的运动模型,使得模型系统噪声方差达到最优,实现对目标检测模型的寻优,达到自适应处理的功能。图11显示了四个目标的实际运动航迹(白色为T3,绿色为T1,红色为T4,蓝色为T2),图12显示了文中算法的预测航迹。

图11 实际运动轨迹

图12 预测运动轨迹
实验表明:文中提出算法的跟踪偏差小、误警率低、运算复杂度随目标数增长呈线性变化、易于硬件实现,是一种解决红外小目标跟踪和检测问题较好的实现方法。
[1]Selim S Z,Ismail M A.K-means Type Algorithm[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1994,6(1):81~87
[2]Bezdek C James.Convergence Theory for Fuzzy C-means:Counter Examples and Repairs[J].IEEE Transactions on Systems,Man and Cybernetics,1987(17):873~877
[3]王俊卿,史泽林,黄莎白.序列图像中运动目标检测[J].光电工程,2005,32(12):6~8
[4]丁艳,赵一帆.运动目标的检测技术研究[J].光学技术,2002,28(4):311~312
[5]Rago C,Willett P,Streit R.Direct Data Fusion Using the PMHT[C]//Proceedings of the 1995American Control Conference,1995
[6]Rago C,Willett P,Streit R.A Comparison of the JPDAF and PMHT Tracking Algorithm[C]//Proceedings of the 1995International Conference on Acoustics,Speech and Signal Processing,1995
[7]张全都,程咏梅,梁彦,等.模糊自适应PMHT机动目标跟踪算法[J].火力与指挥控制,2008,33(12):17~21
[8]刘建华,毕笃彦,刘亲社.一种红外弱小目标的检测方法[J].激光与红外,2008,38(7):732~736
[9]温佩芝,史泽林,于海斌.复杂海面背景红外小目标自动检测方法[J].红外与激光工程,2003,32(6):590~593
[10]邱陵.FCM与PDA相结合的多传感器多目标跟踪算法[J].计算机与数字工程,2008,36(11)
[11]刘松涛,沈同圣,韩艳丽,等.舰船目标海天线提取方法研究[J].激光与红外,2003,33(1):51~53
