基于VC++的船舶电力推进系统故障仿真软件设计
2011-06-05梁树甜沈枫王孟莲张丽
梁树甜 沈枫 王孟莲,2 张丽
(1. 中国船舶重工集团公司第七一二研究所,武汉 430064; 2. 武汉理工大学能源与动力工程学院,武汉 430063)
1 引言
计算机仿真技术是近四十年来发展起来的一门综合性很强的新兴技术学科,它结合了系统工程、现代数学和计算机技术,用计算机求解来反映实际系统的数学模型的过程,以达到研究、开发、使用和检测实际的或设想的系统的目的[1]。对于复杂系统的研究,采用系统仿真的方法,在计算机上构建仿真模型,对仿真对象进行反复多次的实验,既可以取代耗资大的真实物理对象的物理模拟和实验,同时又具有投资少、效益高、风险小、可重复、周期短等特点,目前它已成为船舶电力推进领域研究必不可少的工具。本文采用计算机仿真技术设计船舶交流电力推进系统的故障仿真软件,以其降低电力推进系统条件变化带来的成本和风险,提高实际系统安装之前发现可能出现的问题的可能性,也可以为电力推进系统故障诊断的研究提供数据。
2 仿真软件的总体设计
作为一种软件开发规范,面向对象的软件开发过程和建模方法能够建立复杂的、大规模的、分布式的软件系统,其核心是类(Class)概念及其实例对象(Object)的应用,具有模块化、抽象化、封装性、重用性等特点。在众多的面向对象程序设计的语言中,Visual C++将程序设计方法与可视的软件开发环境完美地结合,再加上其优秀的数值计算能力,以及对 C、C++语言的兼容性,使得Visual C++在科学计算及其可视化方面具有无与伦比的优越性[2]。本文即应用 Visual C++6.0 对船舶电力推进系统故障仿真软件进行设计。
仿真软件采用模块化设计方法[3],主要包括主程序模块、模型控制模块、变压器模型模块、变频器模型模块、电动机模型模块、仿真控制模块、基本参数设置模块、故障现象设置模块、参数显示模块、通信模块等,仿真软件的体系结构如图1所示。

图1 仿真软件体系结构
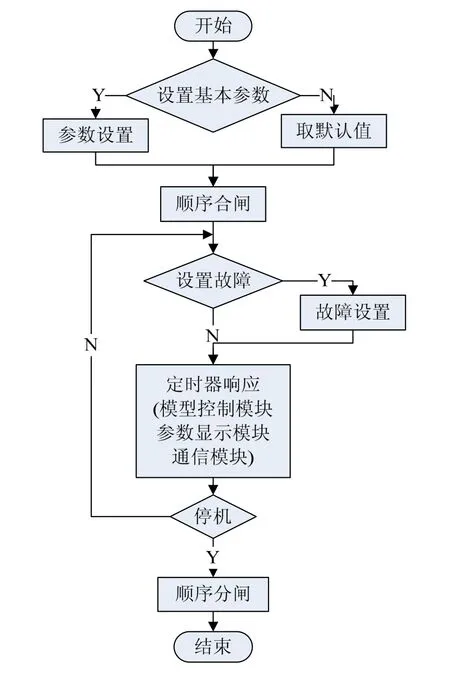
图2 仿真软件流程图
如图2所示,仿真软件流程为:
1) 仿真开始,判断是否进行基本参数设置,若设置基本参数,进入第2步,否则进入第3步;
2) 设置变压器、变频器、电动机、推进工况等基本参数,进入第4步;
3) 基本参数取一组默认值,进入下一步;
4) 顺序合闸,进入下一步;
5) 判断是否进行故障设置,如果要设置故障,进入第6步,否则进入第7步;
6) 设置变压器、变频器、电动机的运行参数和典型故障,进入下一步;
7) 主程序模块中的定时器响应函数,完成模型控制模块、参数显示模块、通信模块的基本功能,进入下一步;
8) 判断是否停机,如不停机,返回第5步,否则进入下一步;
9) 顺序分闸,仿真结束。
3 仿真软件的模块设计
下面具体介绍各软件模块的设计。
3.1 系统模型
系统模型示意图如图3所示。
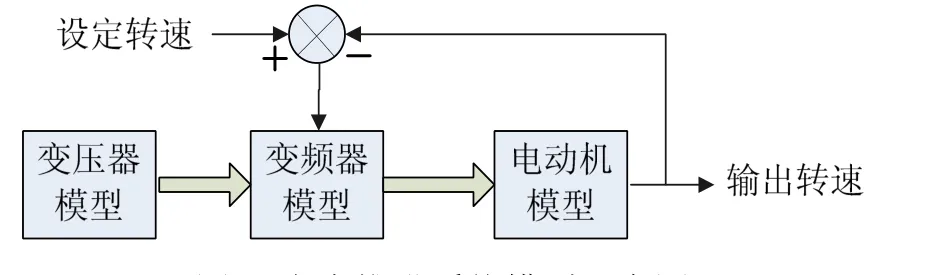
图3 电力推进系统模型示意图
3.1.1 变压器模型
类 CTransformer是变压器的模型,输入是发电机组的输出电压和电流,输出是变频器的输入电压和电流,建立模型的基本公式为:

式中:U1、U2——变压器原、副边电压;I1、I2——变压器原、副边电流;N1、N2——变压器原、副边绕组匝数;k——变压器变比。
3.1.2 变频器模型
变频器的出现是船舶电力推进取得长足发展和广泛应用的关键因素。通过调节变频器的输出频率和电流值即可达到调节推进电动机输出转速和转矩的目的,继而使螺旋桨输出船舶航行所需的推进功率。类 CConverter是变频器的模型,输入是变压器的输出电压和电流,输出是电动机的输入电压和电流。
3.1.3 电动机模型
推进电动机由推进变频器供电,直接驱动螺旋桨。类CMotor是电动机的模型,输入是变频器输出电压和电流,输出是转速,建立模型的基本公式有[4,5]:

式中:n——异步电动机转速,f——输入频率,s——转差率,p——极对数,P1——电动机从电源吸收的功率,UN、IN——定子相电压、相电流,cosφ——功率因数,P2——电动机输出功率,η——电动机效率,T——电动机转矩,I——电动机回转部分的转动惯量,Tp——螺旋桨上的水阻力矩,KQ——螺旋桨扭矩系数,ρ——海水密度,D——螺旋桨直径。运用上述公式建立电动机运动模型。
3.2 模型控制模块
模型控制模块完成系统模型运行及流程控制、参数输入输出等工作,模型控制模块与模型模块类图如图4所示。
如图 4所示,类 CTransformer、CConverter、CMotor继承于虚基类 CEquipment,COperator对象包含一个或多个派生于 CEquipment的对象。类COperator维护模型控制的相关信息,提供模型控制的相关行为。COperator对象通过接口CEquipment来访问、操作具体模型对象(如CTransformer对象)。仿真过程中,需要经常根据仿真结果修改模型,这种设计充分运用了 C++的多态性,屏蔽模型类的实现细节,将模型类变化对软件的影响降低。
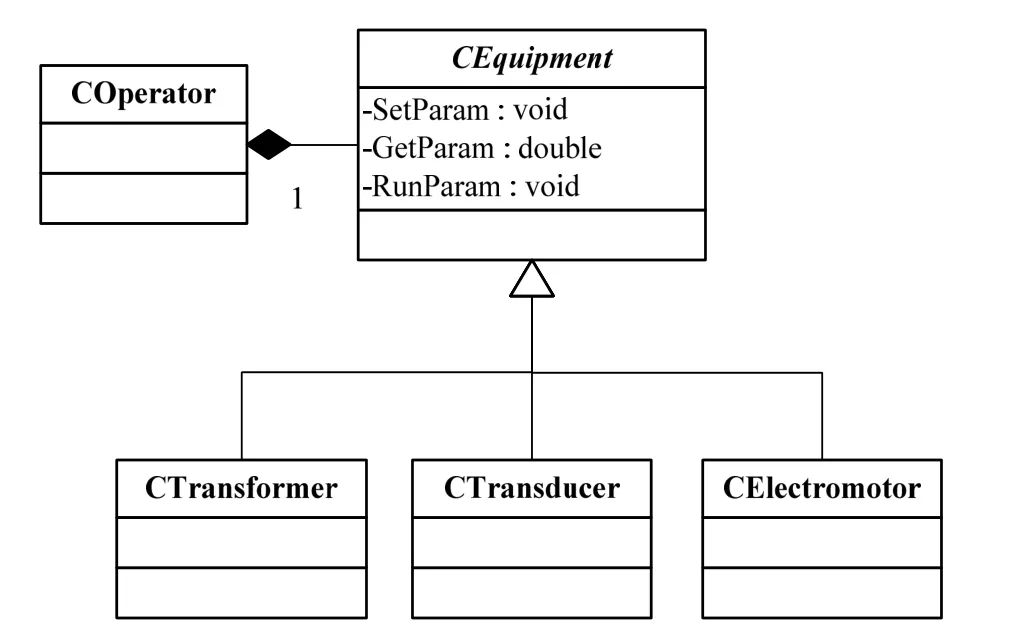
图4 模型控制模块与模型模块类图
3.3 接口层
接口层是软件和用户及外部系统之间进行交互的接口,主要包括人机接口和通信模块,其中人机接口包括主程序模块、基本参数设置模块、故障现象设置模块、仿真控制模块、参数显示模块。仿真软件主画面如图5所示。

图5 仿真软件主画面
主程序模块是仿真软件中最重要的部分,其定时器响应函数通过访问模型控制模块来驱动模型程序运行,同时调用通信模块完成与外部系统的交互。这里,由于窗口定时器精度存在限制,且其定时消息的优先权太低,而多媒体定时器不依赖于消息机制, 而是用函数产生一个独立的线程,定时精度可达1ms,又由于模型程序对实时性要求较高,所以定时器采用多媒体定时器。
基本参数设置模块完成基本参数的设置,这些参数是电力推进系统运行所需的最基本的参数,并且在仿真过程中不能再设置,所以要在仿真开始前进行设置,设置对话框如图6所示。

图6 基本参数设置对话框
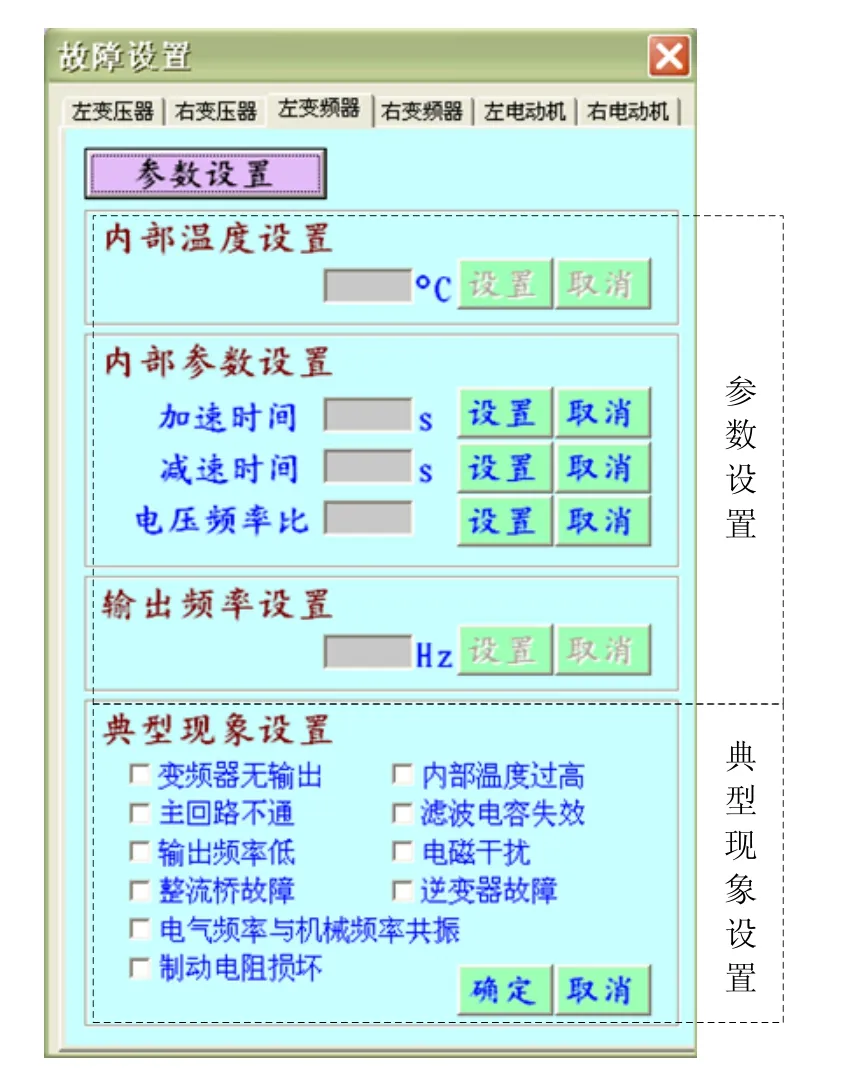
图7 故障现象设置对话框
故障现象设置模块完成仿真中故障现象[6,7]的设置,故障现象的设置分为两种,一种为典型现象的设置,一种为参数的设置,如图 7所示。由于仿真系统分为左右推进系统,所以故障现象设置中变压器、变频器、电动机各分左右两个。设置的数据也是经主程序模块传递到各模型模块,各模型模块根据故障设置进行系统故障仿真。
参数显示模块包括推进系统主要参数显示、系统单线图显示(如图 5所示)、左右变压器参数显示、左右变频器参数显示、左右电动机参数显示。此模块负责把模型运行中的数据取出并显示,以此反映系统的运行状况。
4 仿真实例
基本参数默认值采用某实船的数据。
推进电机正常运行的转速仿真曲线如图 8所示。

图8 推进电机正常运行转速仿真图
本软件主要功能是进行故障模型的仿真。例如设置左变频器“输出频率低”现象,此时推进电机转速仿真曲线如图9所示。

图9 系统故障时推进电机转速仿真图
与实船测量数据比较,本仿真软件能模拟实际电力推进系统的运行状况。
5 结束语
本文在分析船舶电力推进想系统运行原理的基础上,在 Visual C++6.0中建立了船舶电力推进系统的运行仿真模型,设计了船舶电力推进系统故障仿真软件。通过试验分析并与实际系统比较,证明软件可以仿真船舶电力推进系统正常和故障情况下系统各参数的变化。本故障仿真软件可以作为船舶电力推进系统设计和研究的参考,也可以为船舶电力推进系统故障诊断的研究提供数据。
[1]季振洲, 李东, 姚鸿勋. 计算机组成技术[M]. 哈尔滨:哈尔滨工业大学出版社,2003.
[2]孙鑫, 余安萍. VC++深入详解[M]. 北京: 电子工业出版社,2006.
[3]潘洁, 王月忠. 基于 VC++的空间电磁环境仿真软件设计[J]. 微计算机信息,2005,21(8):112-113.
[4]宋世全. 应用 Matlab进行船舶电力推进系统仿真[J].实验室研究与探索,2008,27(12):168-172.
[5]梅晓榕, 柏桂珍, 张卯瑞. 自动控制元件及线路[M].北京: 科学出版社,2005.
[6]王孟莲, 马丹, 沈枫, 龙飞. 船舶电力推进系统故障诊断技术研究[J]. 船电技术,2010,30(12):1-4.
[7]马丹, 王孟莲, 沈枫. 船舶电力推进系统故障诊断专家系统设计[J]. 船电技术,2010,30(12):9-11.
