振动分析在离心泵空化监测中的应用
2011-06-05段向阳王永生苏永生
段向阳,王永生,苏永生
(海军工程大学 船舶与动力学院,武汉 430033)
离心泵空化后,空泡溃灭时辐射的高频脉动噪声会诱发泵体产生剧烈的振动。随着空化的发展,产生的空泡数量逐步增多,空泡溃灭的速度加快,对泵体产生的冲击作用随之增大,引起泵体的振动加剧、振幅也增加。因此空化空蚀程度与振动信号的幅值、振动水平等之间存在着一定的关系。
国内外很多学者对空化监测进行了大量研究,但其研究对象主要以水轮机等水力机械为主[1-3],研究方法涉及到高速摄影法,声压法,声发射等[4-6]。也有很多学者采用振动分析法对离心泵中的空化进行了研究,但其特征提取主要是基于时域分析的[5,7]。本文在实验室条件下,运用振动法对离心泵的空化进行了大量的试验研究,进一步探索离心泵空化时振动信号的频域特点和规律,为开展离心泵的实时空化监测奠定基础。
1 空化监测原理和方法
空化发生时,会产生大量的气泡,气泡随着周围流体运动到高压区时会溃灭。空泡的溃灭会产生高频脉冲,辐射空化噪声,引起介质压力波动,并诱发机械结构振动。空化监测的原理就是测量空泡溃灭时产生的冲击波和辐射噪声以及介质的压力脉动和机械结构的振动等,从测量信号中提取出表征空化的特征值,建立空化特征值与空化强度的对应关系,通过监测信号中各特征值的变化来判断空化的发生和发展程度[8]。
本文通过安装在离心泵轴承座及泵壳上的加速度传感器获取空化前后的振动加速度信号,通过时域分析和频域分析等分别提取信号的特征。在此基础上,计算与分析空化前后的振动加速度水平,通过振动分析,寻找离心泵空化的特点和规律,提取空化特征,再根据这些特征值的属性,判断离心泵空化空蚀的发生、发展以及严重程度,进而确定离心泵空化监测的特征量及其对应的空化监测阈值。
2 试验装置与试验方法
本实验在离心泵开式试验台上进行,试验台示意图如图1所示。该泵为6叶单级单吸离心泵,进出口直径分别为125mm和100mm,额定功率为7.5 kW,额定转速为1440 r/min,额定流量100 m3/h。泵进口前有一段透明管路,可以实时观测流动情况。

图1 离心泵开式试验台示意图Fig.1 Scheme of the open test rig for centrifugal pump
试验前,先记录各仪表的初始值。试验过程中,保持转速不变,通过逐步调节进口阀的开度改变管路系统的阻力,从而降低泵进口的压力,模拟空化的产生和发展。同时调节出口阀,使流量保持不变。待系统稳定后,分别记录每个工况点泵出口压力表以及进出口水银压差计的读数,同时通过高速数据采集系统采集振动加速度信号。加速度传感器的频响范围为3 kHz~15 kHz,线性范围为3 kHz~12 kHz,采样频率设置为64 kHz。
根据以上试验方法,在额定转速下(n=1440 r/min),分别对流量 Q=90 m3/h、100 m3/h和 110 m3/h三种情况进行了多次重复试验,每个流量分别测取了9个工况点,每工况点采集10组数据进行平均。
3 离心泵空化的振动特征
3.1 不同测点位置的影响
为了寻找能够较好反映出空化状况的振动加速度测点,将加速度传感器分别安装在支撑轴承轴承座和离心泵泵壳上,测点布置位置如图2所示。

图2 加速度传感器安装位置Fig.2 Installation positions of the acceleration transducers
在额定流量下,按上述试验方法,同时测取9个工况点下测点A和测点B的加速度信号,各个工况点记录参数如表1所示。分别对两测点的信号进行5 kHz~8 kHz和8 kHz~12 kHz的带通滤波,考察加速度信号在这两个频段上的能量分布特点。图3和图4分别为测点A和测点B的加速度信号在空化前后不同频带的归一化能量分布。

表1 额定流量下各工况点试验参数Tab.1 Test parameters of each operating point on rated flow
国内外很多学者通过研究发现空化噪声存在极值。从图3和图4中可以看出,空化振动信号也呈现这一变化趋势,即随着空化的不断发展,振动加速度逐渐增大,达到某一极值后又减小。对比两图可以发现,测点A处的振动加速度信号在空化前后的变化率大约为2∶1,而在测点B处约为4∶1,即测点B对空化振动更加敏感,此处测取的振动加速度信号在空化前后的变化更加明显,有利于进一步研究空化的振动特征。为此,以下重点对测点B处的振动信号进行分析。
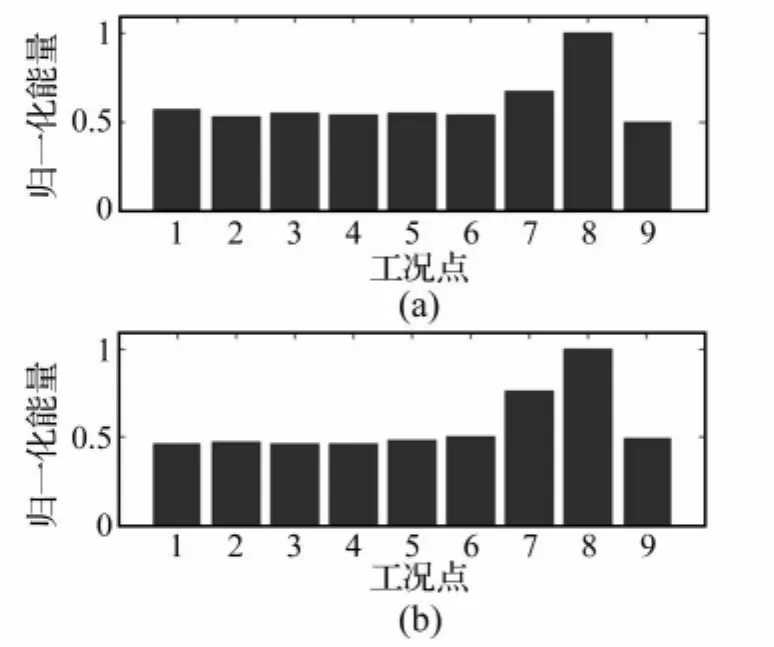
图3 测点A空化前后各频带的能量分布(a):5 kHz~8 kHz,(b):8 kHz~12 kHzFig.3 Energy distribution of the measuring point A
3.2 空化振动信号的特性
在实际的空化在线监测现场,由于背景噪声的干扰,而空化声信号相对于背景噪声而言又较为微弱,往往会淹没在强大的干扰噪声之中,在时域中往往无法识别。

图4 测点B空化前后各频带的能量分布(a):5 kHz~8 kHz,(b):8 kHz~12 kHzFig.4 Energy distribution of the measuring point B
通过对比可以发现空化前后振动信号的幅值有了一定程度的增加,但在时域图上难以进一步获取有关空化的特征信息。从某种程度上讲,空化信号的频域特性比时域信号更加明显[9],因此,在空化空蚀分析时,往往会通过频域分析确定空化信号的频谱成分,进而识别空化空蚀的特征频率,而时域图仅仅作为参考数据。
为了便于分析,参照声压级等量级分别定义振动加速度级、频带振动加速度级和振动加速度谱级[10]。
假设{an}={a1.a2,…,an}为测取的一振动加速度序列,则其振动加速度级定义为:

式中:ae为振动加速度的有效值;a0为参考值,通常取a0=10-6m/s2。
振动加速度谱级的定义是将振动加速度信号通过带宽1Hz的理想滤波器得到的加速度级。其计算公式为:

式中fi为第i号滤波器的中心频率,Δfi为第i号滤波器的有效带宽。
在已知振动加速度谱级Las(fi)时,可以根据式(2)计算频带振动加速度级La(fi),然后根据下式计算宽带振动加速度级La(或总振动加速度级):

根据实验记录的相关参数,通过式(4)和式(5)计算各个流量下的汽蚀余量和扬程。

将扬程下降3%的点作为临界汽蚀点,通过作图法求得了各流量下的临界汽蚀余量NPSHC。不同流量下各工况点的汽蚀余量和扬程以及临界汽蚀余量如表2所示。从表2中可以看出,临界汽蚀点基本处在工况点6附近。
图5为额定流量下空化前后振动信号的频谱分布。经频域分析发现,振动信号在整个频段上都有能量分布,且在 2 kHz、4 kHz、6 kHz以及 8 kHz附近有明显的峰值,而在15 kHz以上频段信号能量相对较小。实验过程中,管路系统出现了轻微的振动,到某一工况点后振动有所加剧。为减小低频段信号的干扰,增加信噪比,信号在采集前进行了1 kHz~20 kHz的带通滤波。

图5 空化前后振动信号频谱图Fig.5 Frequency of the vibration signal before and after cavitation

表2 不同流量下各工况点的汽蚀余量和扬程Tab.2 Net positive suction head and head of delivery in different flow discharge
4 空化监测特征量及其阈值的确定
根据图5可以发现,空化后振动信号在5 kHz以上的变化趋势更加明显,且在6 kHz和8 kHz附近出现了明显的峰值。根据振动信号的频域分布特点,同时考虑到加速度传感器的线性范围,为了更好对振动信号进行量化分析,分别对其进行2 kHz~5 kHz、5 kHz~8 kHz和8 kHz~12 kHz的带通滤波,考察其在这几个频带内的频带振动加速度级以及宽频带上总振动加速度级的变化规律。图6、图7和图8分别为额定流量下振动信号在上述三个频带内的频带振动加速度级变化趋势。由图可见,三个频带振动加速度级都有着相似的变化规律。但在2 kHz~5 kHz频带内空化前后振动加速度级变化不大,而其中5 kHz~8 kHz和8 kHz~12 kHz的频带振动加速度级在空化前后都有10 dB左右的明显差别,可以作为空化监测的特征量。图9为5 kHz~12 kHz宽带振动加速度级,也有着类似的明显变化趋势。

图6 2 kHz~5 kHz频带振动加速度级Fig.6 Band vibration acceleration level in 2 kHz~5 kHz

图7 5 kHz~8 kHz频带振动加速度级Fig.7 Band vibration acceleration level in 5 kHz~8 kHz

图8 8 kHz~12 kHz频带振动加速度级Fig.8 Band vibration acceleration level in 8 kHz~12 kHz

图9 5 kHz~12 kHz宽带振动加速度级Fig.9 Broadband vibration acceleration level in 5~12 kHz
表3中列出了空化前后不同流量下各频带振动加速度级以及宽带振动加速度级大小。表中将初始工况点的振动信号作为参考背景。比较几个频带振动加速度级可以看出,在2 kHz~5 kHz频段内,空化前后的振动加速度级只有2 dB左右的差别,即该频段对空化不敏感,不适宜作为空化监测的特征频段。而在5 kHz~8 kHz和8 kHz~12 kHz频段内,其振动加速度级在空化前后的变化值明显高于2 kHz~5 kHz,均有10dB左右的增加。其中5 kHz~8 kHz频段内空化时最大振动加速度级高达147dB,空化前后最大差值11 dB,最小差值9 dB,平均相差10 dB左右。而在8 kHz~12 kHz频段内,空化时最高振动加速度级在139 dB~142 dB范围内,空化前后最大差值10 dB,最小7 dB,平均相差8.5dB。由此可见,5 kHz~8 kHz频带振动加速度级空化前后的变化趋势更加明显,更适宜作为空化监测的特征量。表中2 kHz~12 kHz和5 kHz~12 kHz宽带振动加速度级根据 2 kHz~5 kHz、5 kHz~8 kHz和8 kHz~12 kHz的频带振动加速度级通过式(3)求得。

表3 不同流量下的频带振动加速度级Tab.3 Vibration acceleration level on different flow capacity
根据以上分析,5 kHz~8 kHz和8 kHz~12 kHz的频带振动加速度级和5 kHz~12kHz的宽带振动加速度级都可以作为空化监测的特征量。其监测阈值的选择可以以各工况下最大振动级的均值X和均方差S为依据,以为参考基准,在此基础上再降低3 dB~5 dB作为参考监测阈值。

表4 各频带的参考监测阈值Tab.4 Referential monitoring threshold for each frequency band
在确定参考监测阈值的基础上,以各工况下的临界汽蚀点的振动加速度级为报警基准,若某工况下该阈值与其临界汽蚀点的振动加速度级的差值在±2 dB以内,则视为正确报警,否则都视为虚警,以此考察该阈值在不同工况下报警的准确性。各频带的参考监测阈值及对应的虚警率如表4所示。
根据试验数据分析结果,5 kHz~8 kHz、8 kHz~12 kHz和5 kHz~12 kHz频段的监测阈值分别取为138 dB、135 dB和140 dB,在保证较小虚警率的前提下,可以有效的防止空化的发展,阈值的选择是合理可行的。
5 结论
通过对离心泵空化时的振动信号的测量与分析,主要结论如下:
(1)加速度传感器在不同的测点位置测得的信号差别较大。本文中选取的位于泵壳上的测点B对空化更加敏感,更适宜作为空化监测点;
(2)空化时振动信号呈现出先增强,达到极值后又逐步减小的趋势;在5 kHz以上变化趋势更加明显,且在6 kHz和8 kHz附近出现了明显的峰值;
(3)5 kHz~8 kHz和8 kHz~12 kHz频带振动加速度级以及5 kHz~12 kHz宽带振动加速度级在空化前后都有10 dB左右的增大,能够明显的反映出空化的变化趋势,都可以作为空化监测的特征量。
[1]Escaler X, Egusquiza E, Farhat M, et al. Vibration Cavitation Detection Using Onboard Measurements[C].Fifth International Symposium on Cavitation,Osaka,Japan,2003.
[2]Lahdelma S,Juuso E K.Vibration Analysis of Cavitation in Kaplan Water Turbines[C].17th IFAC World Congress,Seoul,Korea,2008.
[3]占梁梁,张勇传,周建中,等.轴流转桨式水轮机空化振动监测的试验研究[J].水力发电学报,2008,27(5):142-146.
[4]Cudina M. Detection ofcavitation phenomenon in a centrifugal pump using audible sound[J].Mechanical Systems and Signal Processing,2003,17(6):1335 -1347.
[5]Alfayez L,Mba D.Detection of incipient cavitation and determination of the best efficiency point for centrifugal pumps using acoustic emission[J].Proceedings of the Institution of Mechanical Engineers,Part E:Journal of Process Mechanical Engineering,2005,219:327 -344.
[6]段向阳,王永生,苏永生.水力机械空化(汽蚀)监测研究综述[J].水泵技术,2008(5):1-6.
[7]Teder L,Pappel T.Detection of Cavitation in Pumps through Higher Order Derivatives[C].4th International DAAAM Conference"Industrial Engineering-Innovation as Competitive Edge for SME",Tallinn,Estonia,2004.
[8]段向阳,王永生,苏永生,等.喷水推进器空化监测技术研究[J].舰船科学技术,2009,31(5):39-41.
[9]Wen Y,Henry M.Time frequency characteristics of the vibroacoustic signal of hydrodynamic cavitation[J].Journal of Vibration and Acoustics,2002,124:469 -475.
[10]王之程,陈宗岐,于 沨,等.舰船噪声测量与分析[M].北京:国防工业出版社,2004.
