终端区四维轨迹到达时间的控制与计算
2011-05-31郝佳欢
杜 实 ,郝佳欢 ,张 楠
(1.中国民航大学空中交通管理学院,天津 300300;2.天津空管分局,天津 300300)
终端区四维轨迹到达时间的控制与计算
杜 实1,郝佳欢1,张 楠2
(1.中国民航大学空中交通管理学院,天津 300300;2.天津空管分局,天津 300300)
研究的目的是使管制员通过飞行管理计算机计算的结果来较精确地预测飞机到达各航路点的时间范围,在同时有多架飞机进场的情况下合理安排进近顺序。利用向量分解法,分析了飞机在有风情况下,特别是风向风速改变时地速的变化。给出了实时地速的计算方式,指出了通过调节两个航路点间加速度变化的位置来控制飞机到达下一航路点的时间,并给出了到达各航路点时间范围的计算方式。通过计算,管制员不仅可以推测出到达各航路点的高度及时间范围,避免飞行冲突,还能够安全有序的引导飞机按预计时间着陆,减少航班延误量。
终端区域;四维轨迹;到达时间;延迟时间;提前时间
目前中国对终端区四维飞行轨迹的水平轨迹、高度剖面及速度剖面已有深层的研究,在分析速度剖面中提出了引入双参数等方法来扩大对飞行时间的调整范围[1],但需要通过多次迭代来选择合适的速度剖面,并且没有考虑到实时风向风速改变情况下地速的变化。本文针对有风情况下的地速变化,提出了实时地速的计算方法,此方法可使计算得到的速度剖面、到达各航路点的时间范围更加精确。
目前国内的交通管制系统中,飞机进场的引导过程基本上是人工完成,空管人员用无线电话向飞行人员发出指令,飞行人员按接收到的指令操纵飞机。这种人工导引控制环不仅需要大量的通话,而且还不能精确预测飞机到达跑道的时间,在同时有多架飞机进场时,管制员的工作负荷相当大。本文着重讨论在降低飞行员和管制员工作负荷的同时,还可较精确地预测飞机到达各航路点的时间的计算方法。
1 到达时间的控制
控制到达时间的目的是使飞机到达特定航路点的时间尽可能接近预定到达时间,以便使终端区飞机进行高密度并有序的运行。对最后航路点到达时间的控制仅基于对飞行速度的控制[2]。4D引导速度控制的实现为飞机速度控制系统提供速度指令。
速度指令Vcref定义为规定的当前速度VAN与和航空器位置误差成比例的误差之和

其中:K1[3]为经验常数且K1=0.04 s-1。
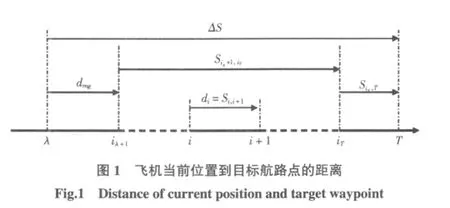
1.1 ΔS的计算
ΔS的距离是沿着航迹从飞机当前位置与设定的目标航路点的距离。对应的速度指令由式(1)计算得出,此速度要控制在规定速度限制范围内(ATC规定的速度范围和由飞机构型设计安全性限制的范围)。
如图1所示

其中:λ为飞机当前位置;i表示航路点i;di表示航段i;T为目标航路点;drng为飞机与即将达到的航路点之间的距离;SiA+1,iT为即将达到的航路点与目标航路点前一个航路点的距离;SiT,T为目标航路点前一个航路点与目标航路点的距离。计算得到的距离为沿航迹飞行方向的距离。ΔS变化率限制在6.1 m/s。
1.2 地速的计算

地速方程为被积函数,SiT,T(t)为沿轨迹方向对时间的积分。当前地速等于当前空速与风的向量和。对于常量风速风向,沿着计划路径的当前地速VGN的生成是到达目标航路点轨迹生成问题的关键。每个航路点的当前空速特定,因此地速剖面是风向与空速剖面的向量和,航路点间的空速剖面与当前加速运动相关。因此如图2所示地速为


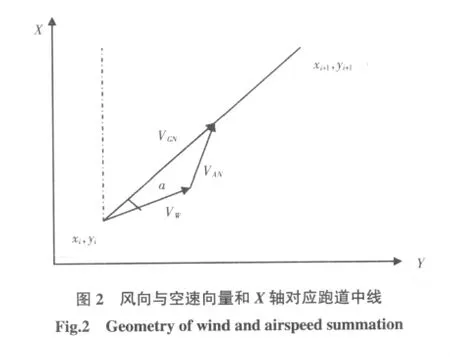
当前空速可以表示成与航路段i的距离Si有关的线性方程:VA(NS)i=VAN,i+DiSi,其中VAN,i为航路点i的当前空速,Di为速度改变率。最大和最小速度的限制也可使用此表达式。为适应飞机沿环形航路段飞行时与风向夹角的变化,给定a(S)i=ai-,其中 ai表示飞机瞬间飞越航路点i时航径与风向的夹角,Si为航段距离,Ri为环形航段的转弯半径。因此

2 到达时间的计算
2.1 两航路点间到达时间的计算
因此每个航段的到达时间为
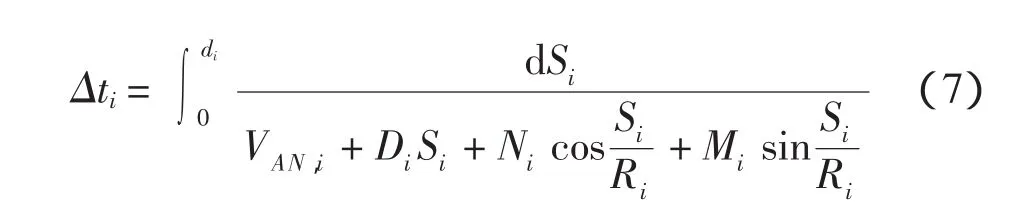
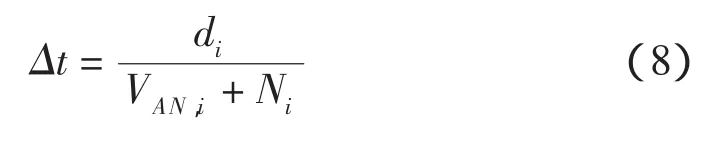
对于直线航径这种情况,空速是常量,因此上式可简化为
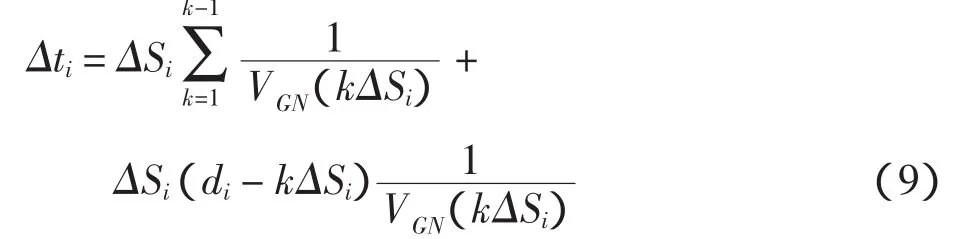
对于环形航径
2.2 航路点i和i+1之间的最大提前和延迟时间
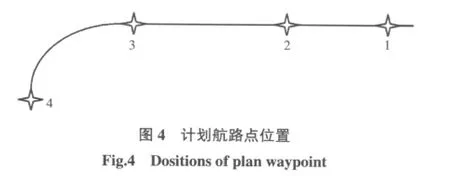
如图4所示,设飞机从航路点i(1)飞到航路点i+1(4),航路点1到3的航段为直线航径,航段3到4为环形轨迹。飞机以当前速度飞行,到达点1、3、4的速度一定,要想减少飞行时间需要在航段内以最大的速度飞行。
如图5所示,剖面1代表飞机沿直线航径飞行时需要的最少时间与速度的关系,为了使飞行时间最小,就要尽晚进行减速,即加速度为负值,图5中所示M点即是最晚的减速时间。设此段时间为T0,即以恒速vA飞行的时间。从M开始减速直到航路点3规定的速度。
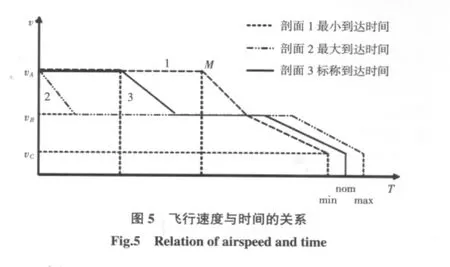
剖面2表示飞机沿直线航径飞行所需最长时间的飞行时间与速度的关系。所需时间最长,就需要飞机尽早减速飞行,即从到达航路点1时立刻开始减速到vB,并以vB飞行至航路点3,所需时间为Tp。
剖面3表示飞机沿直线航径按标称到达时间飞行时飞行时间与速度的关系,引入参数δ,并且满足0≤δ≤1,则飞机沿直线航径飞行时间与剖面1和2的关系可以表示为:(1- δ)T0+ δTp=Tnom,其中(1- δ)T0表示飞机按标称到达时间时以vA恒速飞行的时间,δTp表示以vB恒速飞行的时间。当δ=0时,即以恒速vA飞行至最晚减速点开始减速,对应剖面1表示的飞行时间;δ=1时,即过航路点1立即减速,对应剖面2表示的飞行时间。因此可以得到:
从vA减速到vB的水平距离为

其中:a为惯性加速度,当飞机加速时a为正,减速时a为负。
以vA恒速飞行的时间为

减速飞行的时间为

以vB恒速飞行的时间为

环形轨迹的飞行时间为

其中:vC为飞机到达航路点4的速度。由上述的时间关系式得到如图5所示的时间图线。
飞机完成航路点1到航路点4之间航段所需的最短时间为

最长时间为

预计飞行时间为

可根据飞机在航路点1的实时速度与航路点1当前速度的误差来确定ρ的取值,以确保到达下一航路点的速度与其当前速度更接近。那么每一航段的飞行时间应满足 Tmin≤Δti≤Tmax。
最大延迟时间

最大提前时间

以上三条航路点间的速度剖面可为两航路点间,特别是与最后航路点间提前/延迟到达时间的速度调节提供参考依据。该飞行时间是由第一航路点到最后航路点之间的地速产生。
3 算例与结果分析
3.1 算例数据
以B737-300飞机为例,计算天津滨海国际机场ANRAT-9A标准仪表进场航线,通过6个航路点,在16R跑道着陆时从起始航路点到各路点的到达时间,如图6所示。操纵限制参数为


3.2 计算结果
各航路点经纬度已知,航路点高度由终端区域4D引导高度剖面计算方法得到[4-5]。计算结果如表1所示。
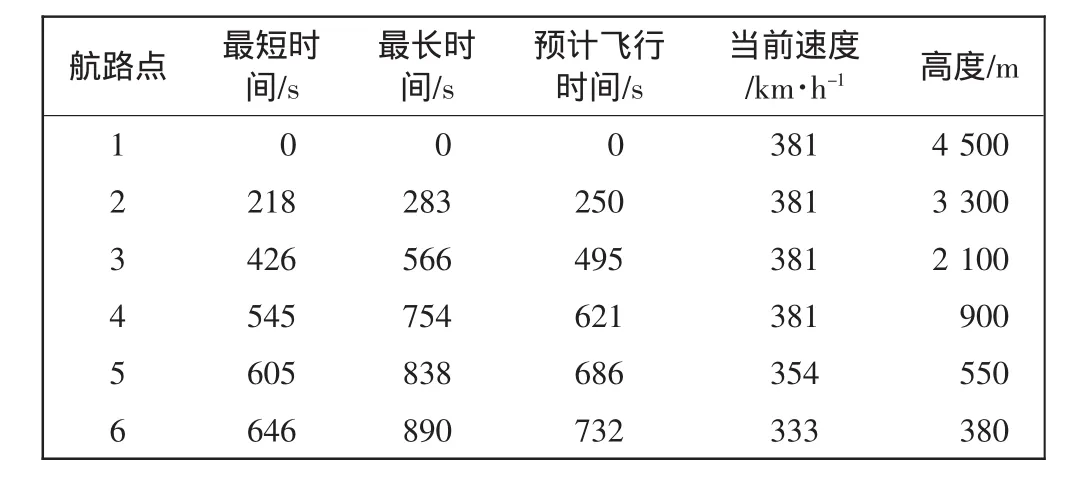
表1 从起始航路点到达各航路点的到达时间Tab.1 Arrival time of initial waypoint and every waypoint
从表1可以看出飞机在第4航路点之前是等速飞行,对无风情况速度保持381 km/h不变,从航路点4开始减速,在最后航路点降至所需速度。最后航路点所需速度为333 km/h。
4 结论与建议
1)风对终端区域四维引导地速的速度剖面有较大影响。对于无风时到达各航路点时间的计算比较容易,但在实际工作中,由于风向风速即时变化,计算量非常大,地速的计算应将实时风速风向输入到机载飞行管理计算机系统或终端区四维导航计算软件中,每10 s更新1次,飞行员根据计算结果及时进行调整,以避免飞机偏离预计航迹。
2)管制员可以较精确地预测飞机到达各航路点的时间,因此可根据终端区飞机进近时预先计算出的时间合理的安排进近顺序,恰当地调度飞机着陆,提高机场利用率,同时也减轻了飞行员与管制员的工作负荷。
3)通过资料可知[4],与无风比较,飞机为了在规定的时间着陆,在同一距离和同一高度上,逆风的真空速要增大,而顺风则要减小,因此逆风和顺风计算地速时风对四维导航矢量的影响很小。
4)本文仅进行理论上的研究,为了进一步验证理论的正确性和适用性,在有条件的情况下,最好进行模拟实验研究。
[1] 吴树范,郭锁凤.基于四维引导的飞机纵向飞行剖面的解算与综合[J].航空学报,1993,14(5),261-268.
[2]IAN A B WILSON.4-Dimensional Trajectories and Automation Connotation and Lessons learned from past research[C]//ICNS Conference,May 1-3,2007.
[3]FRANK NEUMAN,DAVID N WARNER.A Flight Investigation of a 4D Area Navigation System Concept for Stol Aircraft in the Terminal Area NASA TMX-73.195[R].Boston:NASA,1977.
[4 ]王大海.终端区域4D引导的高度剖面与速度剖面的研究[J].飞行力学,2000,18(1):14-18.
[5]IIKEITH WICHMAN.4D-Trajectory Enabled Continuous DescentAp proaches[R].ArlingtonVirginia:SmithsAerospaceFAANew TechnologiesWorkshop I,2007.
Arrival Time Control and Computation of 4D Trajectories in Terminal Area
DU Shi1,HAO Jia-huan1,ZHANG Nan2
(1.College of Air Traffic Management,CAUC,Tianjin300300,China;2.Tianjin Station of Air Traffic Management,Tianjin300300,China)
The basic research purpose of this paper is that controller could forecast the range of arrival time of each waypoint accurately via the calculation of flight management system and arrange the approach order reasoningly when more than one plane approached at the same time.This paper make use of analytical method of vectors to analyse the change of ground speed,especially when the wind direction and wind speed changed.The calculation method of instantaneous ground speed is given.By way of modulate the position of acceleration change between tow waypoints to control the arrival time of the next waypoint.Given the calculation method of range of the arrival time.Calculated,the controller could speculate about the range of arrival time of each waypoint, avoid collision, and also control the plane landing at the expected time, reduce the rate of delay.
terminal area; 4D trajectory; arrival time; delay time; advance time
V249.3
A
1674-5590(2011)01-0001-04
2010-09-18;
2010-12-02
杜 实(1962—),男,辽宁沈阳人,副教授,硕士,研究方向为空中交通管理.
(责任编辑:杨媛媛)
