空域虚拟极化滤波原理及实验结果
2011-05-29戴幻尧李金梁李永祯王雪松
刘 勇 戴幻尧 李金梁 李永祯 王雪松
(国防科技大学电子科学与工程学院,湖南 长沙 410073)
1.引 言
有源压制干扰可以在时域、频域上掩盖真实目标回波,给雷达目标检测、跟踪带来严重挑战,是当前最主要的雷达干扰技术[1]。特别对于自卫式或随队支援干扰情况,干扰信号将由雷达天线主瓣进入接收机,用很小的干扰功率就可完全掩盖真实目标回波,使传统的频域、空域抗干扰技术无法奏效[1-2]。为此,需要探求新的抗干扰措施。
受尺寸、成本等因素限制,干扰机通常采用单极化天线,且目标回波与干扰信号具有不同的极化状态,极化抗干扰已成为雷达抗干扰领域新的重要发展方向[3-6]。虚拟极化滤波是最主要的极化抗干扰技术之一,它通过对两路正交极化通道的接收信号进行复加权求和,可以有效抑制有源干扰[5]。然而,大多数现役雷达并不具备极化测量能力,如果通过增加发射或接收极化通道的硬件改造方法,则需要花费较大的改造成本和较长的改造周期。为此,文献[7][8]探求了一种新的极化抗干扰算法,该算法巧妙利用天线固有的空域变极化特性,可估计干扰信号的极化状态,实现干扰抑制。文献[9][10]给出天线的空域极化特性定义,并分析了典型抛物面天线的空域极化特性;文献[7][8]论述了利用天线空域极化特性对抗有源压制干扰的基本原理。
然而,前述研究仅局限于理论分析,还未具体到信号处理算法,也未得到实验验证。为此,以具有机扫或电扫能力的防空雷达抗干扰为应用背景,研究了对抗有源压制干扰的空域虚拟极化滤波算法,通过仿真实验和雷达实测数据验证了算法的有效性。
2.雷达接收信号模型
当雷达天线进行空间扫描时,雷达接收信号将受到天线空域特性调制。本节分析雷达天线的空域极化特性,给出了干扰距离单元和目标距离单元的接收信号模型。
2.1 雷达天线的空域极化特性
由天线理论可知,天线的极化方式由其辐射电场的极化状态决定[10]。通常,天线被设计成特定的极化方式,称为主极化,但受几何形状、加工误差、馈源偏焦等因素限制,天线极化会偏离理论值,产生寄生极化分量,称作交叉极化,主极化分量和交叉极化分量共同确定了天线的极化方式[11,12]。理论分析和实测结果均表明,天线的极化方式与空间观测位置有关,即其极化方式将随空间角度的变化呈现出一定规律性变化,称为天线空域极化特性[9]。对于具有机扫或电扫能力的防空雷达而言,其天线的极化方式将是扫描俯仰角及方位角的函数。
设雷达天线的峰值增益为G,主极化为水平极化(H),对应的归一化方向图为gH(φ,θ),交叉极化为垂直极化(V),对应的归一化方向图为gV(φ,θ),其中φ是俯仰角,θ是方位角。在极化基(H,V)下,天线全极化方向图可写成如下矢量形式。
(1)
在满足互易条件下,天线接收全极化方向图与发射全极化方向图相同,统一用G(φ,θ)表示。另外,当只分析天线在特定俯仰角下的空域极化特性时,可把式(1)表示的二维函数简化成一维函数,记作G(θ)。同时,雷达通常工作于脉冲模式,天线的极化方向图由其空间采样值来表征。设雷达天线的3 dB波束宽度为Ω,共有2K+1个采样点,则天线全极化方向图的空间采样形式为
G(θk)=G·g(θk),k=-K,…,0,…,K
(2)
下面以典型的偏馈抛物面天线为例,直观给出天线空域极化特性的示例。图1给出了天线在垂直切面内的几何示意图,其中,设计天线工作频率为3 GHz,焦距f=5 m,天线的口径d=2 m,天线中心位置h=0.5 m.利用GRASP电磁计算软件得到该天线在H面的空域极化特性[13],计算结果如图2(a)、(b)所示,其中,图2(a)是主极化和交叉极化的幅度方向图,图2(b)是两者的相位方向图。天线基本参数为:主极化为水平极化(H),峰值增益为38.56 dB,半功率波束宽度为4.6°,峰值旁瓣比主瓣低26 dB,交叉极化峰值比主极化峰值低33 dB.

图1 偏馈抛物面天线的几何结构示意图

(a) 幅度方向图

(b) 相位方向图图2 偏馈抛物面天线方向图特性的电磁计算结果
可见,该天线的主极化方向图、交叉极化方向图都是方位角θ的函数,呈现出一定的空变特性。
2.2 干扰距离单元的接收信号模型
设干扰机天线的峰值增益为GJ,且其极化方式在雷达天线扫描期间固定不变,在雷达极化基(H,V)下记作JHV=[JH,JV]T,‖JHV‖2=1.干扰机发射功率为PJ,干扰信号为j(t),常用的干扰样式有窄带直放噪声干扰、噪声调幅干扰或噪声调频干扰等。对于自卫式或随队干扰情况,干扰信号由天线主瓣进入雷达接收机,雷达接收干扰信号将受到天线空域极化调制。在特定方位角θk下,接收干扰信号为
=KJ·[gH(θk)JH+gV(θk)JV]·j(θk,t)
(3)

有源压制干扰通常覆盖整个搜索距离范围,占据多个距离单元。设搜索距离划分为M个距离分辨单元,分别记作τm,m=1,…,M.把仅含干扰的距离分辨单元称为干扰距离单元,记作τJ。对于干扰距离单元,雷达在方位角θk的接收干扰信号为vJ(θk,τJ),θk=θ-K,…,θK.同时,假定干扰信号在同一距离单元,不同方位角下并非固定不变,而是围绕均值j(τJ)随机变化,所以,雷达接收到的干扰信号在不同方位角下也是随机变化的,设变化量为Δj(θk,τJ),服从零均值高斯分布,方差为σ2.这样,在干扰距离单元τJ,各方位角下的接收电压可写成线性方程组形式。
(4)
式(4)写成矩阵形式为
vJ(θ,τJ)=KJ·G(θ)J·i(τJ)+Δj(θ,τJ)
(5)



令x(τJ)=[xH(τJ),xV(τJ)]T=KJ·j(τJ)·J,则式(5)可以简化成
vJ(θ,τJ)=G(θ)x(τJ)+Δj(θ,τJ)
(6)
2.3 目标距离单元的接收信号模型

=KT·gT(θk)Es(θk)·e(t-τ0)
(7)

对于窄带防空雷达,雷达目标回波通常仅占据一个距离分辨单元,把该距离单元称作目标距离单元,记作τT。在目标距离单元,雷达接收目标回波信号为vT(θk,τT)。在扫描角度范围内,目标散射回波的极化矢量为
=SGT(θ)
(8)
对于同一目标距离单元,雷达在各方位角下的接收目标回波信号可写成矩阵形式为
vT(θ,τT)=KT·D{G(θ)Es(θ)}·e(τT)
(9)
式中D{·}表示取矩阵主对角元素运算。
考虑接收通道噪声的影响,在干扰距离单元的雷达接收信号为
r(θ,τm) =vJ(θ,τm)+n(θ,τm)
=G(θ)x(τm)+Δj(θ,τm)+n(θ,τm),
其中,τm=τJ
(10)
在目标距离单元,雷达接收信号是干扰信号和目标回波信号的叠加,表达式为
r(θ,τm) =vJ(θ,τm)+vT(θ,τm)+n(θ,τm)
=G(θ)x(τm)+Δj(θ,τm)+
s(θ,τm)+n(θ,τm)
(11)

3.空域虚拟极化滤波算法
由式(10)、(11)的信号模型可见,雷达接收信号在干扰距离单元和目标距离单元具有不同特征。通常,假定干扰信号的极化状态在雷达天线主瓣扫描期间固定不变。所以,可利用干扰距离单元信号来估计干扰极化状态,进而用极化滤波处理来抑制干扰信号,该种算法称为空域虚拟极化滤波算法。整个算法流程如图3所示,包括三个过程:接收信号极化分解、干扰极化状态估计、极化滤波处理。
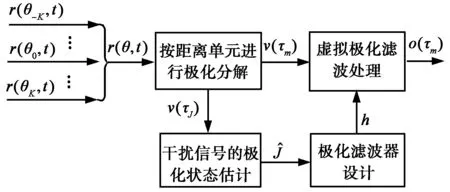
图3 虚拟极化滤波算法处理流程
3.1 接收信号极化分解
设雷达天线主瓣波束扫描过某一空间区域,共有2K+1方位角离散采样,分别是θ-K,…,θK,雷达在每个方位角的接收电压信号为r(θk,t),把该电压信号划分成M个距离分辨单元,并将同一距离单元的2K+1个电压组成矢量r(θ,τm)。信号极化分解就是利用已知天线空域极化特性G(θ),对每一距离单元的电压矢量r(θ,τm)用最小二乘法分解,得到两路正交极化信号v(τm),用公式表示为
(12)
把式(12)展开可以求出
v(τm)=[GH(θ)G(θ)]-1GH(θ)r(θ,τm)
(13)
式中v(τm)=[vH(τm),vV(τm)]T,τm=τ1,…,τM.
3.2 干扰信号的极化状态估计
经上述信号极化分解处理后,每一距离单元的接收信号被分解为两路正交极化信号。对于干扰距离单元,接收信号仅包括干扰信号,而对于目标距离单元,接收信号是干扰信号和目标信号的叠加,因此,极化分解得到的两路正交极化信号在不同距离单元也具有不同特征。利用干扰距离单元的极化分解结果可以得到干扰信号的极化状态估计。由于x(τm)与J仅相差一常数因子,不失正确性,以下用x(τm)进行分析。


在目标距离单元τT,雷达接收信号用式(11)表示。分解得到的两路正交极化信号将不同于干扰距离单元的分解结果。该分解结果是干扰极化状态的有偏估计,把式(11)代入式(13),有E{v(τT)}=x(τT)+[GH(θ)G(θ)]-1GH(θ)s(θ,τT)。该式表明在目标距离单元,分解得到的正交极化信号与干扰极化状态的真实值存在固有偏差,偏差量与天线的空域极化状态及目标极化散射矩阵有关。
3.3 极化滤波处理
(14)
用该极化滤波矢量h对正交极化信号v(τm)进行极化滤波处理,就可起到抑制干扰的作用。各距离单元的输出结果为
o(τm)=hTv(τm)
(15)
在干扰距离单元τJ,极化滤波输出结果的均值为E{o(τJ)}=hTx(τJ);而在目标距离单元τT,极化滤波输出结果的均值为E{o(τT)}=hTx(τT)+hT{[GH(θ)G(θ)]-1GH(θ)s(θ,τT)}。

4.实验结果
前文基于有源压制干扰和目标回波的接收信号模型,提出了空域虚拟极化滤波算法。为验证算法有效性,以直放式窄带噪声干扰为例进行仿真实验,验证了该算法的有效性及抗干扰性能;然后对某部防空警戒雷达的实测数据进行处理,进一步验证了算法的有效性。
4.1 仿真实验结果


图4 空域虚拟极化滤波算法的抗干扰效果(仿真数据)
为分析空域虚拟极化滤波算法在不同干扰条件下的抗干扰性能,固定目标回波参数,而把干扰极化分别取左旋圆极化、右旋圆极化、45°线极化及135°线极化,干扰信号功率分别取22.2 dBw、17.2 dBw、12.2 dBw及7.2 dBw,并设定INR恒定。仿真得到各组干扰条件下的SIR改善因子,表1是四种干扰极化条件下,SIR改善因子与干扰功率的关系,可见,EIF都能达到36~38 dB.

表1 空域虚拟极化滤波算法的抗干扰性能(仿真数据)
4.2 实测数据结果
利用某部防空警戒雷达组织了外场实验,验证了算法的有效性。该雷达工作于S波段,在方位向采用机械扫描,转速为3转/分,脉冲重复周期为410 Hz,则方位向采样间隔为0.04°,天线主极化为V极化,主瓣3 dB波束宽度1.3°、峰值旁瓣比主瓣低34 dB,交叉极化峰值增益比主极化主瓣低30 dB.外场实验场景布置示意图如图5(a)所示。
首先,把射频信号源放置在高塔作为发射,雷达正常工作于接收状态,并依次调整发射信号为V极化和H极化,从而测得雷达天线的全极化接收方向图,测量结果如图5(b)所示,其中,实线是V极化方向图,虚线是H极化方向图。然后,把有源干扰机放置在高塔,雷达在相同工作条件下接收干扰信号。干扰信号为4 MHz窄带噪声干扰,极化方式为左旋圆极化。
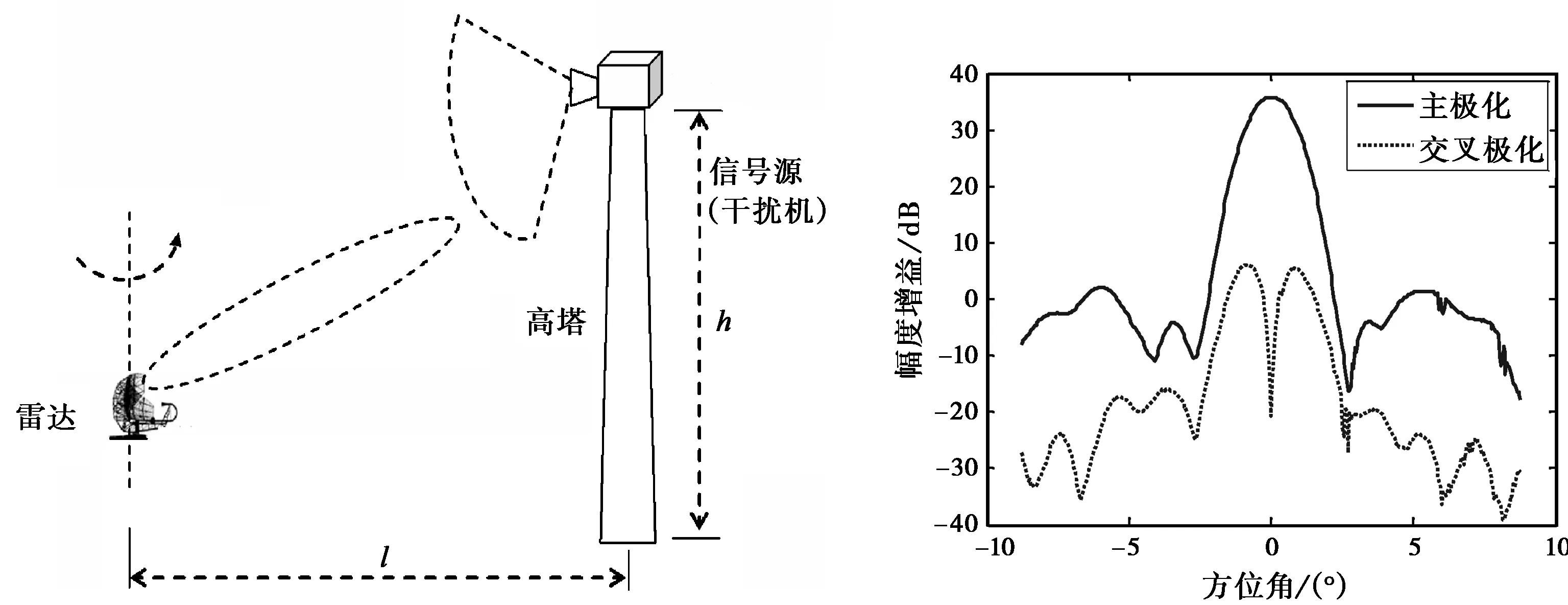
(a) 实验场景示意图 (b) 天线实测方向图图5 天线测量实验场景及测量结果

图6 空域虚拟极化滤波算法的抗干扰效果(实测数据)
固定目标回波参数(0 dBw),而改变干扰信号功率(分别取19.5 dBw、14.5 dBw、9.5 dBw、4.5 dBw),算法抗干扰性能如表2所示,EIF达到31 dB以上。

表2 空域虚拟极化滤波算法的抗干扰性能(实测数据)
5.结 论
自卫式有源压制干扰能够在频域、空域上掩盖目标回波,从而使常规频域滤波、空域滤波等雷达抗干扰措施无法奏效,给防空雷达系统带来了严重挑战。为此,研究了一种空域虚拟极化滤波算法。该算法无需对现役单极化雷达进行硬件改造,而是巧妙利用天线固有的空域极化特性,使其具有一定的极化抗干扰能力,仿真实验和实测数据均表明该算法能有效抑制有源压制干扰,提高输出信干比。分析该算法的误差因素及扩展到更多干扰样式是下一步工作重点。
[1] CURTIS SCHEHER D. Electronic Warfare in the Information Age[M]. London: Artech House, 1999.
[2] 刘德树. 雷达反对抗的基本理论与技术[M]. 北京理工大学出版社, 1988.
[3] 庄钊文, 肖顺平, 王雪松. 雷达极化信息处理及其应用[M]. 北京: 国防工业出版社, 1999.
ZHUANG Zhaowen, XIAO Shunping, WANG Xuesong. Radar polarization information processing and its application[M]. Beijing: National defense industrial press, 1999. (in Chinese)
[4] WANG Xuesong, CHANG Yuliang, DAI Dahai, et al. Band characteristics of SINR polarization filter[J]. IEEE Trans on AP, 2007, 55(4): 1148-1154.
[5] POELMAN A J. Virtual polarisation adaptation: A method for increasing the detection capability of a radar system through polarisation-vector processing[J]. Proc. IEE, Pt. F, 1981, 128(5): 261-270.
[6] 王雪松, 代大海, 徐振海, 等. 极化滤波器的性能评估与选择[J].自然科学进展, 2004, 14(4): 442-448.
[7] 罗 佳, 王雪松, 李永祯, 等. 一种估计来波信号极化状态的新方法[J]. 国防科技大学学报, 2008, 30(5): 56-61.
LUO Jia, WANG Xuesong, LI Yongzhen, et al. A novel method for polarization states estimation of receiving wave[J]. Journal of National University of Defense Technology, 2008, 30(5): 56-61. (in Chinese)
[8] 李金梁, 罗 佳, 常宇亮, 等. 基于天线空域极化特性的虚拟极化接收技术[J]. 电波科学学报, 2009, 24(3): 389-393.
LI Jinliang, LUO Jia, CHANG Yuliang, et al.. Virtual polarization receiver based on the spatial polarization characteristics of antenna[J]. Chinese Journal of Radio Science, 2009, 24(3): 389-393. (in Chinese)
[9] 罗 佳, 王雪松, 李永祯, 等. 天线空域极化特性的表征及分析[J]. 电波科学学报, 2008, 23(46): 620-628.
LUO Jia, WANG Xuesong, LI Yongzhen, et al. Description and analysis of spatial polarization characteristics of antenna[J]. Chinese Journal of Radio Science, 2008, 23(4): 620-628. (in Chinese)
[10] 戴幻尧, 罗 佳, 李永祯, 等. 抛物面天线空域极化特性与分析[J]. 电波科学学报, 2009, 24(1): 126-131.
DAI Huanyao, LUO jia, LI Yongzhen, et al. Study on the characteristics of spatial instantaneous polarization of parabolic refection antenna[J]. Chinese Journal of Radio Science, 2009, 24(1): 126-131. (in Chinese)
[11] H Mott. 天线和雷达中的极化[M]. 林昌禄, 等(译). 成都: 电子科技大学出版社, 1989.
[12] RUDGE A W. Offset Parabolic Reflector Antenna: A Review [J]. Proc of the IEEE, 1978, 66(12): 1592-1618.
[13] Grasp9-General Reflector and Antenna Farm Analysis Software, 丹麦TICRA公司网站,http://www.ticra.com/script/site/page.asp?artid=33.
[14] 张贤达. 信号处理中的线性代数[M]. 北京: 科学出版社, 1997.
